") 基于 RT-Thread專業(yè)版的EtherCAT主站方案
基于 RT-Thread專業(yè)版的EtherCAT主站方案

(一) 方案介紹
本方案基于 RT-Thread 專業(yè)版,在RT-Thread端集成EtherCAT主站協(xié)議,通過EtherCAT對伺服電機或遠程IO進行實時控制,具備傳輸速度快,實時性高,擴展設(shè)備靈活等特點。在 RT-Thread實時操作系統(tǒng)上運行 EtherCAT主站協(xié)議,大大提高了實時性,極大降低了循環(huán)同步抖動時間,可滿足各種對實時性要求苛刻的應用場景。
以下是在瑞芯微 RK3568平臺上實現(xiàn) EtherCAT 主站控制匯川 SV630ND 伺服驅(qū)動電機運行的演示圖。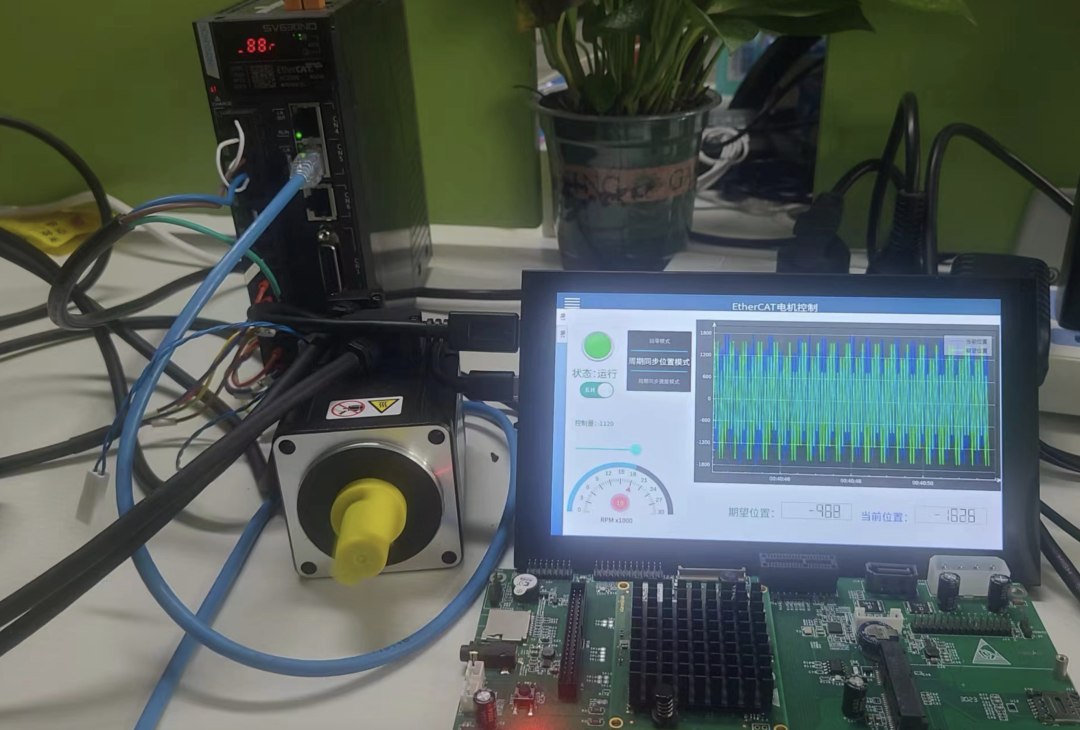
圖1-1 RK3568混合部署EtherCAT控制匯川SV630ND控制器
EtherCAT (Ethernet Control Automation Technology) 是由德國倍福公司在2003年提出的工業(yè)以太網(wǎng)技術(shù),具有很高的實時性。傳統(tǒng)的以太網(wǎng)通信中每一個節(jié)點都是按照接收,處理和轉(zhuǎn)發(fā)這個三個流程進行,而EtherCAT則是同時傳輸和處理EtherCAT數(shù)據(jù)。EtherCAT已成為工業(yè)自動化領(lǐng)域中最受歡迎的總線協(xié)議之一,被廣泛應用于機器人、自動化生產(chǎn)線、運動控制等場景。
EtherCAT使用標準的IEEE802.3以太網(wǎng)幀,單從以太網(wǎng)角度看,EtherCAT是二層網(wǎng)絡(luò),常說的MAC層,以太網(wǎng)幀頭使用以太網(wǎng)類型0x88A4來和其他以太網(wǎng)幀相區(qū)別。所以在EtherCAT主站中通常可以在以太網(wǎng)驅(qū)動層通過數(shù)據(jù)幀頭識別,分離出TCPIP數(shù)據(jù)幀和EtherCAT數(shù)據(jù)幀,實現(xiàn)TCPIP協(xié)議棧和EtherCAT協(xié)議棧共同使用。

圖1-2 EtherCAT數(shù)據(jù)幀結(jié)構(gòu)一個完整的數(shù)據(jù)幀結(jié)構(gòu)如圖1-3所示:
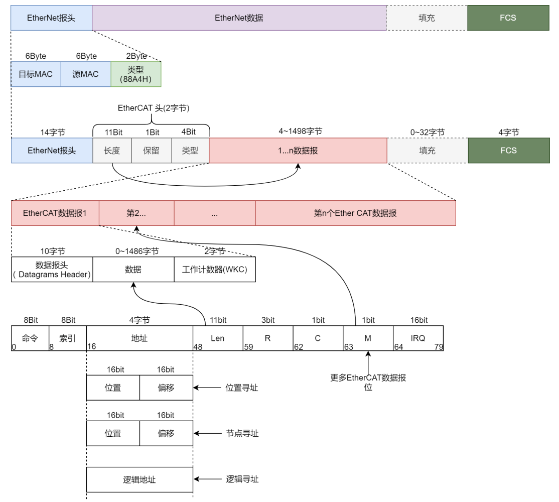
圖1-3 EtherCAT數(shù)據(jù)幀完整結(jié)構(gòu)
EtherCAT數(shù)據(jù)位于以太網(wǎng)幀數(shù)據(jù)區(qū),EtherCAT數(shù)據(jù)由EtherCAT頭和若干EtherCAT數(shù)據(jù)報文組成。其中EtheRCAT頭中記錄了EtherCAT數(shù)據(jù)報的長度、和類型,類型為1表示與從站通訊。EtherCAT數(shù)據(jù)報文內(nèi)包含多個子報文,每個子報文又由子報文頭、數(shù)據(jù)和WKC域組成。子報文結(jié)構(gòu)含義如下:

圖1-4 EtherCAT子報文結(jié)構(gòu)含義
下圖為一個EtherCAT數(shù)據(jù)幀傳輸動態(tài)過程:
圖1-5 EtherCAT數(shù)據(jù)幀傳輸過程
EtherCAT在伺服電機控制器上的應用中通常是基于CANopen的CiA402標準規(guī)范。這套配置文件規(guī)范標準化了伺服驅(qū)動器、變頻器和步進電機控制器的功能行為。在EtherCAT中,通常被稱為COE(CANopen Over EtherCAT)。COE中定義了狀態(tài)機,控制字,狀態(tài)字,參數(shù)值,它們映射到過程數(shù)據(jù)對象(PDO)配置文件已經(jīng)在IEC 61800-7系列規(guī)范中進行了部分國際化標準。
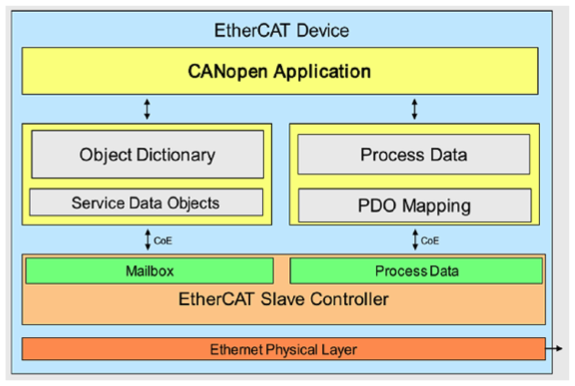
圖1-6 EtherCAT COE框架圖
(二) 方案功能特點
?正式授權(quán):RT-Thread 成功加入EtherCAT Technology Group(ETG),已是該組織的正式會員,可提供合作伙伴相關(guān)授權(quán)。
?性能卓越:相對于設(shè)定了相同循環(huán)時間的其他總線系統(tǒng),EtherCAT 系統(tǒng)結(jié)構(gòu)通常能減少 25%-30%的 CPU 負載。可以改善控制精度,獲得更高的吞吐量,并降低成本;RT-Thread硬實時內(nèi)核調(diào)度,可滿足各種對實時性要求苛刻的應用場景;結(jié)合千兆網(wǎng)卡及EtherCAT技術(shù),過程控制數(shù)據(jù)能夠?qū)崟r、快速、高效的傳輸?shù)焦?jié)點,具備極低的通信延遲、高效數(shù)據(jù)處理能力、支持分布式時鐘,循環(huán)時間小于10us (雙軸伺服16字節(jié)IN+16字節(jié)OUT);
?支持全面:EtherCAT主站支持COE、VOE、SOE、EOE、FOE,可靈活移植適配,不需要復雜初始化配置即可運行,提供全面 API 接口及使用示例,主站部署更簡單;
?顯控一體:可基于 RT-Thread 混合部署方案,控制顯示界面可部署在 Linux 端,使用 Qt 或其他圖形庫開發(fā)顯示界面,控制方案在 RT-Thread 實現(xiàn),實現(xiàn)實時運動控制。
?快速啟動:可單獨運行 RT-Thread,上面直接部署運動控制方案及輕量級圖形界面,實現(xiàn)系統(tǒng)快速啟動,上電3秒內(nèi)即可顯示圖形界面,進行完整控制。
?調(diào)試便利:提供專業(yè) RT-Thread Studio IDE支持,支持Jlink仿真調(diào)試,可通過圖形化工具一站式開發(fā),編譯,下載,調(diào)試,可支持斷點,單步跟蹤,變量查看等功能,開發(fā)更高效;
?日志存儲:提供日志存儲功能,所有運動控制及其他相關(guān)重要日志數(shù)據(jù)都可以被高效,可靠的保存到存儲器中。
(三) 方案演示視頻
該 Demo 演示基于RK3568開發(fā)板,通過EtherCAT連接匯川SV630ND控制器進行雙路伺服電機控制,EtherCAT循環(huán)控制周期為1ms,更新時間小于10us。軟件框架如下圖所示:
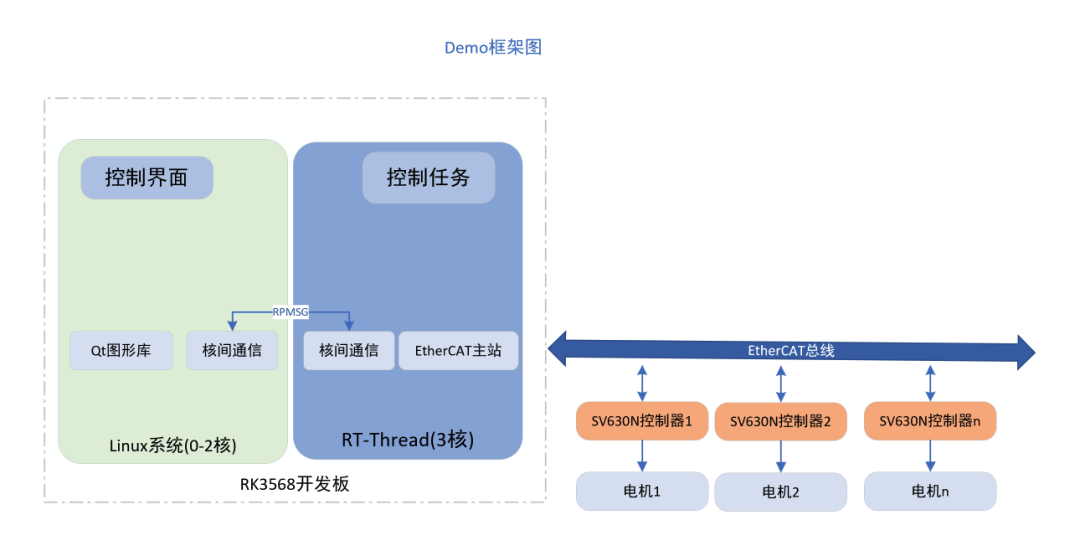
-
伺服電機
+關(guān)注
關(guān)注
88文章
2114瀏覽量
59516 -
瑞芯微
+關(guān)注
關(guān)注
25文章
570瀏覽量
52386 -
ethercat
+關(guān)注
關(guān)注
19文章
1088瀏覽量
39921 -
RT-Thread
+關(guān)注
關(guān)注
32文章
1397瀏覽量
41797
發(fā)布評論請先 登錄
RT-Thread編程指南
如何使用xmake工具來編譯rt-thread工程

RT-Thread專業(yè)版實現(xiàn)對于龍芯全系列處理器支持
RT-Thread學習筆記 RT-Thread的架構(gòu)概述

RT-Thread專業(yè)版實現(xiàn)對于AMD 賽靈思自適應平臺的全面支持
RT-Thread文檔_RT-Thread 潘多拉 STM32L475 上手指南

基于RT-Thread Studio學習

RT-Thread專業(yè)版全面支持瑞芯微RK3568系列平臺并可實現(xiàn)混合部署

4月10日深圳場RT-Thread線下workshop,探索RT-Thread混合部署新模式!

4月25日北京站RT-Thread線下workshop,探索RT-Thread混合部署新模式
RT-Thread混合部署Workshop北京站來啦!
5月16日南京站RT-Thread線下workshop,探索RT-Thread混合部署新模式!
6月6日杭州站RT-Thread線下workshop,探索RT-Thread混合部署新模式!





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論