") VPLC系列機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在五軸聯(lián)動(dòng)點(diǎn)膠上的應(yīng)用
VPLC系列機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在五軸聯(lián)動(dòng)點(diǎn)膠上的應(yīng)用

市場(chǎng)應(yīng)用背景
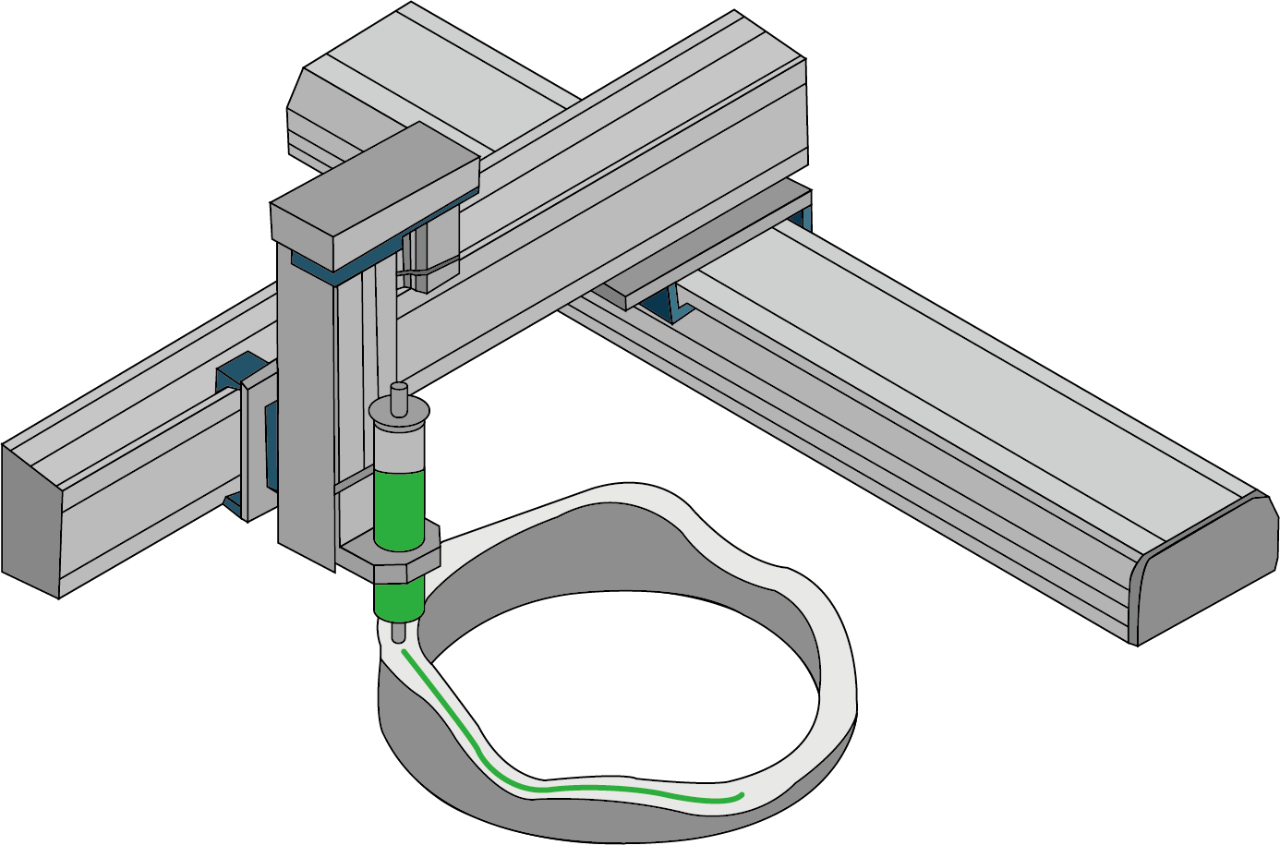
在各類手機(jī)中框、VR/AR邊框、異形屏/曲面屏、智能手表手環(huán)等3C消費(fèi)電子產(chǎn)品的復(fù)雜型面點(diǎn)膠加工過(guò)程中,市面上常見的直角坐標(biāo)型點(diǎn)膠機(jī)已無(wú)法滿足工件在被其他部件遮擋的傾斜、彎曲或邊緣表面位置進(jìn)行精準(zhǔn)點(diǎn)膠操作,導(dǎo)致點(diǎn)膠頭無(wú)法到達(dá)固定加工區(qū)域或難以一次完成點(diǎn)膠任務(wù),進(jìn)而影響產(chǎn)品的整體點(diǎn)膠質(zhì)量。
為解決復(fù)雜型面點(diǎn)膠路徑中膠閥與工件的干涉問(wèn)題,膠閥須與產(chǎn)品表面形成特定夾角,保證與點(diǎn)膠路徑切線垂直且相對(duì)線速度恒定。適應(yīng)異型工件需多維度調(diào)整膠閥相對(duì)姿態(tài)。
五軸聯(lián)動(dòng)點(diǎn)膠機(jī)結(jié)合直線軸X、Y、Z及旋轉(zhuǎn)軸A、B,實(shí)現(xiàn)點(diǎn)膠閥到達(dá)復(fù)雜型面加工的空間控制,執(zhí)行高精度的點(diǎn)膠任務(wù),成為對(duì)于存在點(diǎn)膠路徑復(fù)雜型面的產(chǎn)品的最佳選擇。
三軸、四軸點(diǎn)膠機(jī)方案局限性:
這類點(diǎn)膠機(jī)的移動(dòng)方式是基于直角坐標(biāo)系統(tǒng),適合執(zhí)行直線或輕微曲面任務(wù)的點(diǎn)膠任務(wù)。不適合加工具有狹窄腔內(nèi)、斜面等復(fù)雜型面工件。
靈活性和適應(yīng)性:在點(diǎn)膠加工過(guò)程中,點(diǎn)膠閥與工件的位姿和角度不能動(dòng)態(tài)調(diào)整,因此通常僅適用于處理基本形狀和幾何形狀的加工路徑任務(wù)。但對(duì)于具有復(fù)雜型面的工件,其靈活性和適應(yīng)性受到限制。
精度和效率:當(dāng)遇到需要在多個(gè)空間曲線或復(fù)雜型面上進(jìn)行點(diǎn)膠的任務(wù)時(shí),可能需要使用多臺(tái)設(shè)備并進(jìn)行多次定位安裝。這不僅增加了生產(chǎn)成本,加工工序多,也降低了整體點(diǎn)膠加工效率,同時(shí)多次參數(shù)設(shè)定和校準(zhǔn)可能導(dǎo)致丟失部分點(diǎn)膠精度。
正運(yùn)動(dòng)技術(shù)解決方案:
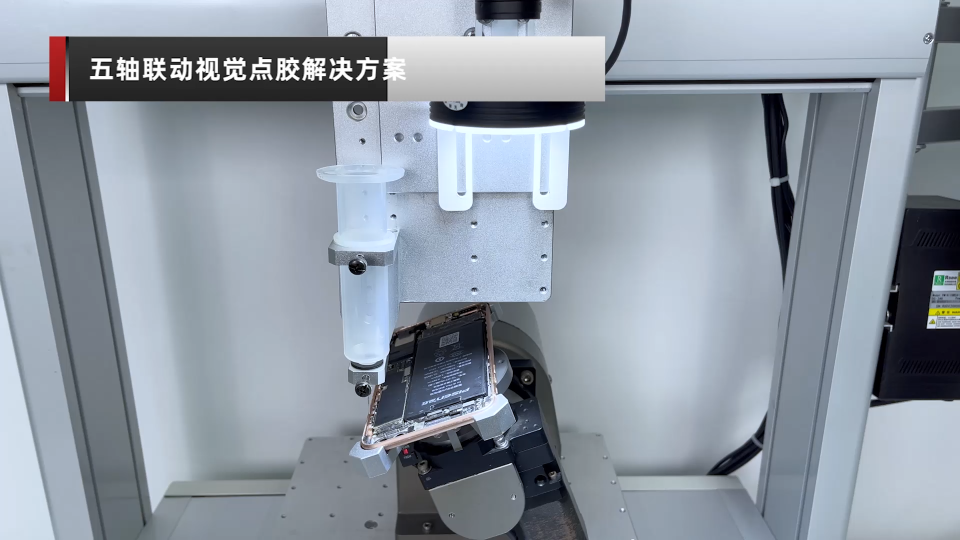
正運(yùn)動(dòng)技術(shù)針對(duì)現(xiàn)有市場(chǎng)需求,開發(fā)了一種基于VPLC系列機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)的五軸聯(lián)動(dòng)點(diǎn)膠解決方案,適用于各種復(fù)雜型面工件的高精度點(diǎn)膠和各種膠水。
方案方案采用RTCP刀具中心點(diǎn)跟隨技術(shù)算法,可實(shí)現(xiàn)各類空間軌跡的追隨控制,實(shí)現(xiàn)點(diǎn)膠閥或工件邊點(diǎn)膠邊傾斜調(diào)整角度,點(diǎn)膠軌跡路徑始終與產(chǎn)品翻轉(zhuǎn)姿態(tài)保持一致,確保了點(diǎn)膠加工過(guò)程的連續(xù)性和平滑性,還顯著提高了空間曲面點(diǎn)膠加工的精度、質(zhì)量和效率。
方案同時(shí)減少了復(fù)雜型面工件的點(diǎn)膠加工工序,可通過(guò)集中處理多個(gè)工序,實(shí)現(xiàn)高速高精的點(diǎn)膠加工,簡(jiǎn)化了生產(chǎn)流程,更好地靈活適應(yīng)復(fù)雜型面工件的點(diǎn)膠生產(chǎn)需求。

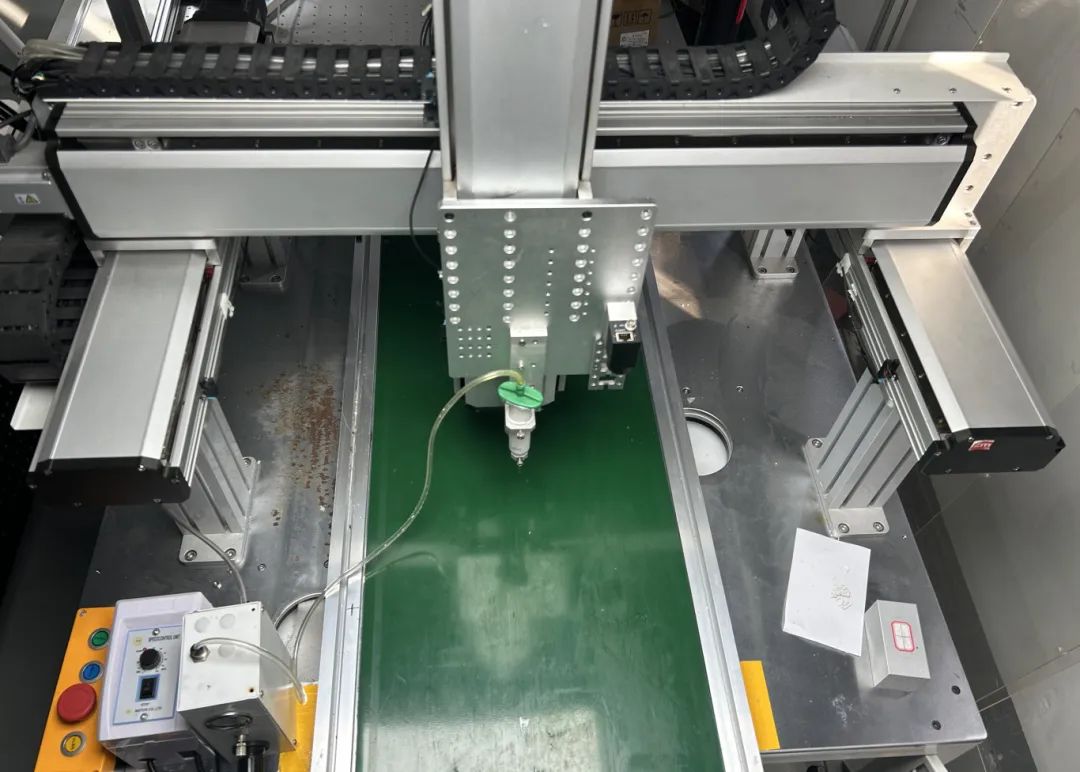
一、機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在五軸聯(lián)動(dòng)點(diǎn)膠上的應(yīng)用
正運(yùn)動(dòng)五軸聯(lián)動(dòng)點(diǎn)膠解決方案設(shè)計(jì)
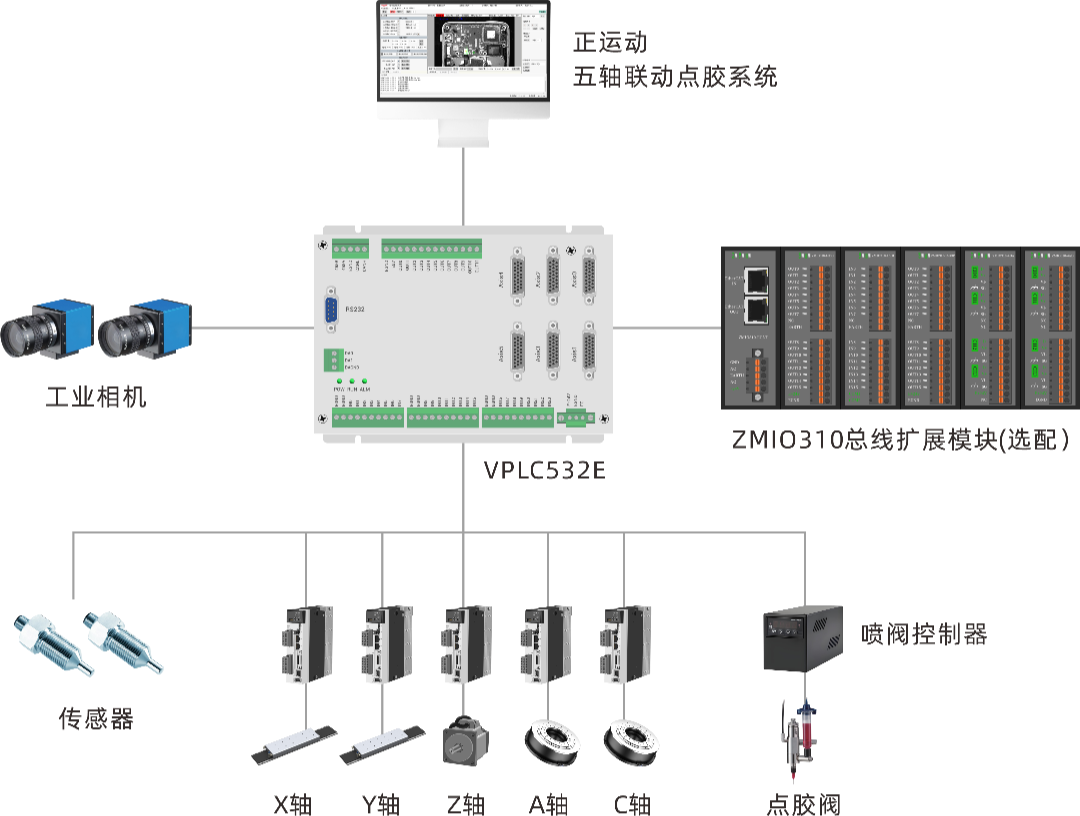
24DI:接原點(diǎn)、限位、測(cè)高等傳感器,以及開關(guān)信號(hào)、編碼器等;
12DO:高速輸出口接工業(yè)相機(jī)的硬觸發(fā)輸入和點(diǎn)膠閥;
EtherCAT接口:接EtherCAT總線驅(qū)動(dòng)器,控制其它軸運(yùn)動(dòng);
6路差分脈沖輸出:接脈沖驅(qū)動(dòng)器,控制X、Y、Z、A、C軸;
EtherNET接口:千兆網(wǎng)口,接支持Gige協(xié)議的面陣相機(jī),實(shí)現(xiàn)視覺(jué)定位應(yīng)用。
運(yùn)動(dòng)控制與機(jī)器視覺(jué)實(shí)現(xiàn)過(guò)程
(1)機(jī)器視覺(jué)
機(jī)器視覺(jué)系統(tǒng)負(fù)責(zé)自動(dòng)檢測(cè)工件的點(diǎn)膠位置,流程包括圖像采集、視覺(jué)定位和位置坐標(biāo)輸出。控制器處理所采集到的圖像,擬合出點(diǎn)膠區(qū)域輪廓的模板特征。根據(jù)膠點(diǎn)中心與點(diǎn)膠區(qū)域輪廓的相對(duì)位置,系統(tǒng)自動(dòng)計(jì)算并補(bǔ)償旋轉(zhuǎn)軸引起的點(diǎn)膠頭偏移的坐標(biāo)數(shù)值,確保點(diǎn)膠頭準(zhǔn)確移至預(yù)定的點(diǎn)膠位置。

(2)運(yùn)動(dòng)控制
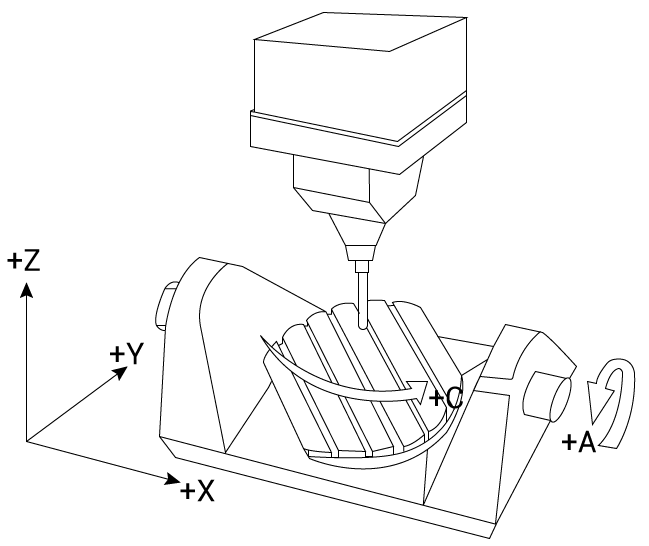
系統(tǒng)具備RTCP(旋轉(zhuǎn)刀具中心點(diǎn)控制)功能,確保在多軸聯(lián)動(dòng)操作中,點(diǎn)膠頭始終精確對(duì)準(zhǔn)工件的特定位置,即使在工件或工具自身旋轉(zhuǎn)時(shí)也能保持恒定的相對(duì)姿態(tài)和角度。
在運(yùn)動(dòng)控制過(guò)程確保C軸在校準(zhǔn)時(shí)保持零點(diǎn)位置。通過(guò)機(jī)械平臺(tái)的水平方向角度校準(zhǔn)來(lái)標(biāo)定A軸,并進(jìn)行旋轉(zhuǎn)中心標(biāo)定。手動(dòng)示教三點(diǎn)坐標(biāo),并記錄不同姿態(tài)的角度,之后計(jì)算并執(zhí)行聯(lián)動(dòng)路徑。
在建立正運(yùn)動(dòng)機(jī)械手的五軸聯(lián)動(dòng)指令時(shí),首先配置機(jī)械結(jié)構(gòu)參數(shù)。完成運(yùn)動(dòng)點(diǎn)位編程后,通過(guò)相機(jī)中心或針頭示教點(diǎn)膠路徑,并在XYZ三軸點(diǎn)位的基礎(chǔ)上調(diào)整空間角度和姿態(tài)。同時(shí)通過(guò)激光測(cè)高傳感器測(cè)定作業(yè)區(qū)域高度,以Z軸坐標(biāo)補(bǔ)償?shù)姆绞奖3贮c(diǎn)膠頭與作業(yè)區(qū)域表面距離的相對(duì)恒定。
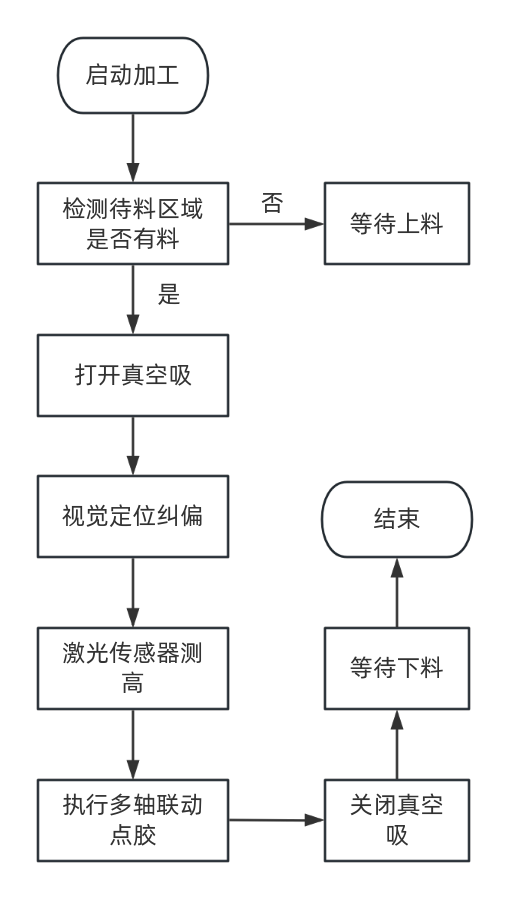
五軸聯(lián)動(dòng)點(diǎn)膠工藝流程
方案核心優(yōu)勢(shì)
RTCP刀具中心點(diǎn)跟隨技術(shù)算法,可實(shí)現(xiàn)各類空間軌跡的追隨控制;
具備五軸應(yīng)用相機(jī)標(biāo)定、針頭補(bǔ)償及各姿態(tài)下的位置拾取功能;
結(jié)合視覺(jué)與運(yùn)動(dòng)控制,無(wú)需額外配置工控機(jī),從而節(jié)約硬件成本并減少安裝空間;
可分段設(shè)定加工速度,來(lái)滿足不同膠水類型和加工需求的平順點(diǎn)膠;
支持雙旋轉(zhuǎn)臺(tái)水平校準(zhǔn)和偏移校準(zhǔn);
小線段平滑控制,滿足插補(bǔ)軌跡精度同時(shí)保證效率;
提前開/關(guān)膠控制、位置比較觸發(fā)和空間軌跡的坐標(biāo)轉(zhuǎn)換功能,優(yōu)化點(diǎn)膠過(guò)程,減少膠水浪費(fèi);
集成小型化組態(tài)平臺(tái),可支持用戶自定義人機(jī)交互界面的開發(fā)編程,提高用戶友好性和操作便利性。

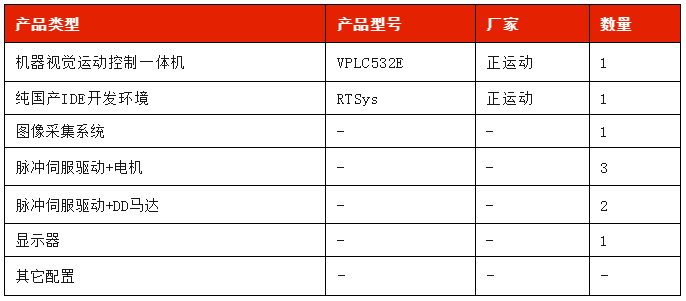
解決方案硬件配置
二、機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)VPLC532E
正運(yùn)動(dòng)技術(shù)VPLC系列機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)是一款基于Linux系統(tǒng)的EtherCAT總線視覺(jué)運(yùn)動(dòng)控制器,可脫機(jī)運(yùn)行,內(nèi)置了豐富的視覺(jué)和運(yùn)動(dòng)控制功能,大幅簡(jiǎn)化視覺(jué)與運(yùn)控項(xiàng)目的配置流程,核內(nèi)數(shù)據(jù)交互快,可顯著降低時(shí)間和成本投入。
VPLC系列機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)的安裝與拆卸過(guò)程便捷,占地空間小,還能與其它控制單元部件(如伺服驅(qū)動(dòng)器、傳感器、編碼器、控制閥等)無(wú)縫集成,提供一個(gè)完整端到端的視覺(jué)運(yùn)動(dòng)控制解決方案。
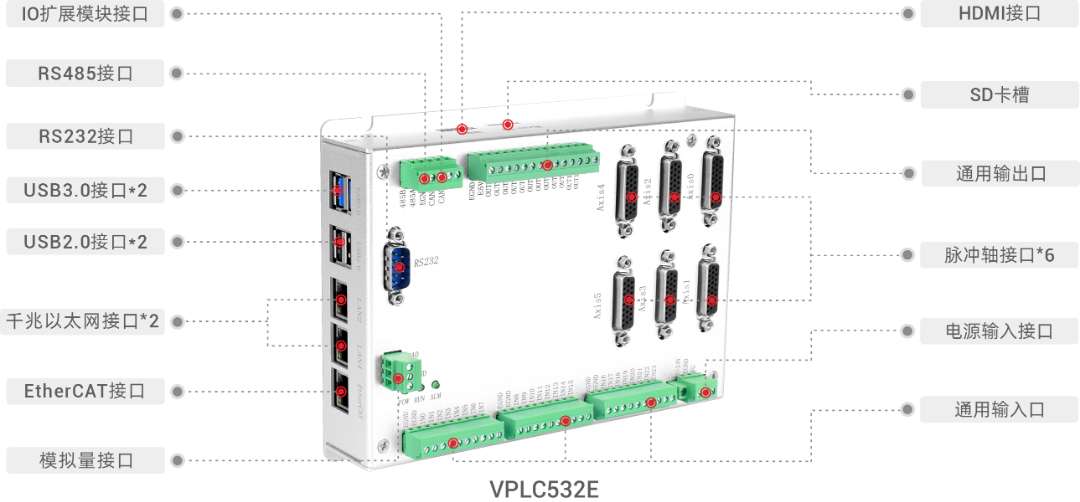
VPLC532E機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī),本身最多支持32軸,支持24+6數(shù)字輸入,12+6數(shù)字輸出,4路高速鎖存輸入,4路高速PWM和PSO硬件輸出,自帶6路高速脈沖軸+編碼器反饋,速度可達(dá)10M。
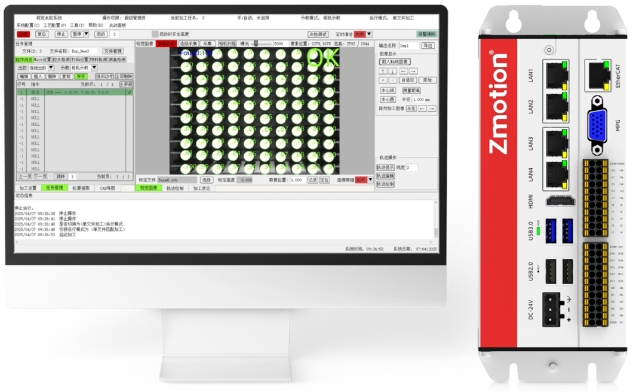
三、提供易用的可視化視覺(jué)點(diǎn)膠開發(fā)調(diào)試軟件

正運(yùn)動(dòng)技術(shù)通過(guò)不斷深化擴(kuò)展VPLC系列視覺(jué)運(yùn)動(dòng)控制一體機(jī)在點(diǎn)膠行業(yè)的應(yīng)用,為用戶提供了簡(jiǎn)單易用的視覺(jué)點(diǎn)膠開發(fā)調(diào)試軟件。該軟件結(jié)合可視化界面和豐富的視覺(jué)、運(yùn)動(dòng)控制功能,只需進(jìn)行簡(jiǎn)單的參數(shù)設(shè)置,即可構(gòu)建視覺(jué)點(diǎn)膠項(xiàng)目程序,可大幅縮短項(xiàng)目開發(fā)周期,降低開發(fā)成本。
視覺(jué)點(diǎn)膠開發(fā)調(diào)試軟件功能介紹
1.功能齊全
支持點(diǎn)膠軌跡打點(diǎn)、線、圓、弧、連續(xù)線段、陣列、提前開關(guān)膠、手動(dòng)示教、相機(jī)示教、點(diǎn)膠工藝功能。
2.機(jī)器視覺(jué)糾偏
產(chǎn)品任意位置和角度擺放,視覺(jué)自動(dòng)識(shí)別并完成點(diǎn)膠、噴膠作業(yè)。
3.操作界面友好功能齊全
調(diào)試編程操作簡(jiǎn)單便捷,支持在視覺(jué)圖像上進(jìn)行示教和點(diǎn)動(dòng)運(yùn)動(dòng)。
審核編輯 黃宇
-
運(yùn)動(dòng)控制器
+關(guān)注
關(guān)注
2文章
448瀏覽量
25230 -
機(jī)器視覺(jué)
+關(guān)注
關(guān)注
163文章
4526瀏覽量
122753 -
正運(yùn)動(dòng)技術(shù)
+關(guān)注
關(guān)注
0文章
119瀏覽量
635
發(fā)布評(píng)論請(qǐng)先 登錄
智能制造車間:聚徽分享上架式工控一體機(jī)與PLC/DCS系統(tǒng)的聯(lián)動(dòng)控制方案
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在背靠背點(diǎn)膠焊錫機(jī)上的應(yīng)用

工業(yè)一體機(jī)應(yīng)用在機(jī)器視覺(jué)領(lǐng)域上都有哪些常見性能優(yōu)勢(shì)?
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在視覺(jué)點(diǎn)膠滴藥機(jī)上的應(yīng)用

機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在視覺(jué)點(diǎn)膠滴藥機(jī)上的應(yīng)用#正運(yùn)動(dòng)技術(shù) #機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī) #運(yùn)動(dòng)控制
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在龍門跟隨點(diǎn)膠的解決方案

觸控一體機(jī)與毛絨玩具的聯(lián)動(dòng),也太可愛了吧 # 觸控一體機(jī)# 瑞芯微# RK3568 #工控一體機(jī) #聯(lián)動(dòng)
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在LED燈噴膠解決方案
高集成機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)VPLC712!

機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在PCB跟隨點(diǎn)膠上的應(yīng)用
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在DELTA并聯(lián)機(jī)械手視覺(jué)上下料應(yīng)用

藍(lán)海華騰參股公司頂控科技發(fā)布運(yùn)動(dòng)控制一體機(jī)系列產(chǎn)品
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)VPLC532E在汽車膠帶纏繞的開放式CNC應(yīng)用

VPLC系列機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在五軸聯(lián)動(dòng)點(diǎn)膠上的應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論