") 抖動的概念和類型 量化時域抖動、隨機(jī)抖動和頻域抖動的方法
抖動的概念和類型 量化時域抖動、隨機(jī)抖動和頻域抖動的方法
抖動基本概念
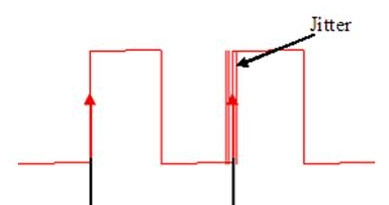
絕對抖動 (Absolute Jitter) 是一個衡量時間點的不確定性概念,參考為理想時鐘的時間點,該相對偏差量可能表示為一個離散時間的隨機(jī)變量。絕對抖動造成的時間點不確定性可能會對很多采樣電路有影響,比如在數(shù)據(jù)時鐘恢復(fù)電路 (CDR) 中,需要利用時鐘沿對數(shù)據(jù)的中心和數(shù)據(jù)變化的沿進(jìn)行采樣,采樣時鐘的絕對抖動對于 CDR 的抖動容限有直接影響。周期抖動 (Period Jitter) 是一個衡量時間段不確定性的概念,定義為實際時鐘和理想時鐘的周期偏差,同樣可以表示為離散事件隨機(jī)變量,如下圖 (圖1) 所示:
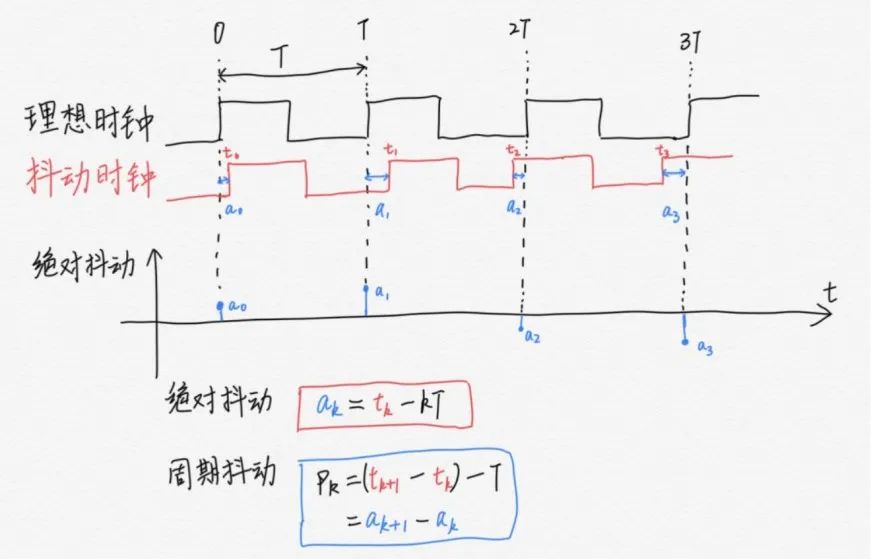
圖1 周期抖動數(shù)據(jù)表
時鐘 Clk 半速率采樣非理想的數(shù)據(jù) Data,如下圖 (圖2) 所示,如果時鐘 Clk 偏離中間采樣位置,該抖動會造成采樣后數(shù)據(jù)的錯誤,且該抖動越大,數(shù)據(jù)的誤碼率就越高。
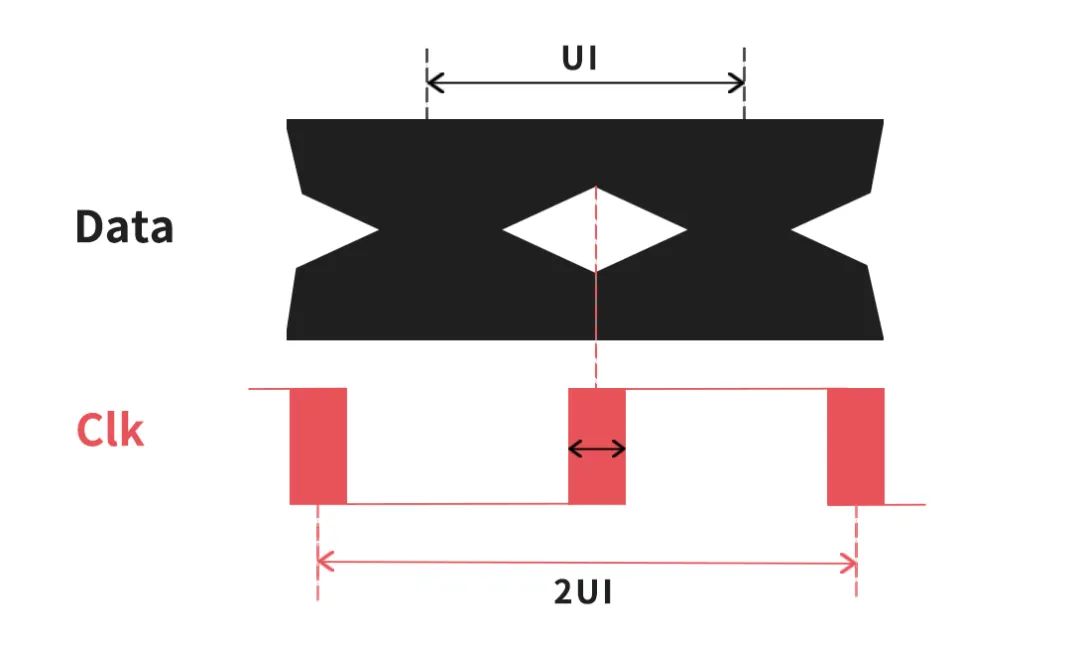
圖2 時鐘 Clk 半速率采樣非理想的數(shù)據(jù)
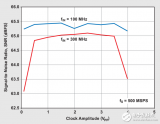
相位噪聲和抖動是量化同一現(xiàn)象的不同方式:信號時序誤差。在時域,普通抖動測量有周期抖動、周期到周期抖動和累積抖動。在這些類型的抖動中,周期抖動 (如圖1) 通常在數(shù)據(jù)表中給出。在頻域中,振蕩器的質(zhì)量是由相位噪聲測量來表征的,相位噪聲測量檢查的頻譜時鐘信號中的邊帶噪聲頻率。為了簡單起見,假設(shè)理想時鐘是帶 a 的完美正弦波頻率 FC,這樣一個純時鐘的所有功率將集中在 FC (如圖2)。相位噪聲的影響是擴(kuò)散功率進(jìn)入邊帶,引起頻率的輕微變化,而不是振蕩器總是產(chǎn)生一個純時鐘信號,有時快一點:FC + ?f,有時慢一點:FC - ?f,時鐘速度轉(zhuǎn)化為時域的抖動,如下圖 (圖3、圖4) 所示。總而言之,電力系統(tǒng)中的各種隨機(jī)和確定性噪聲源會引起抖動。
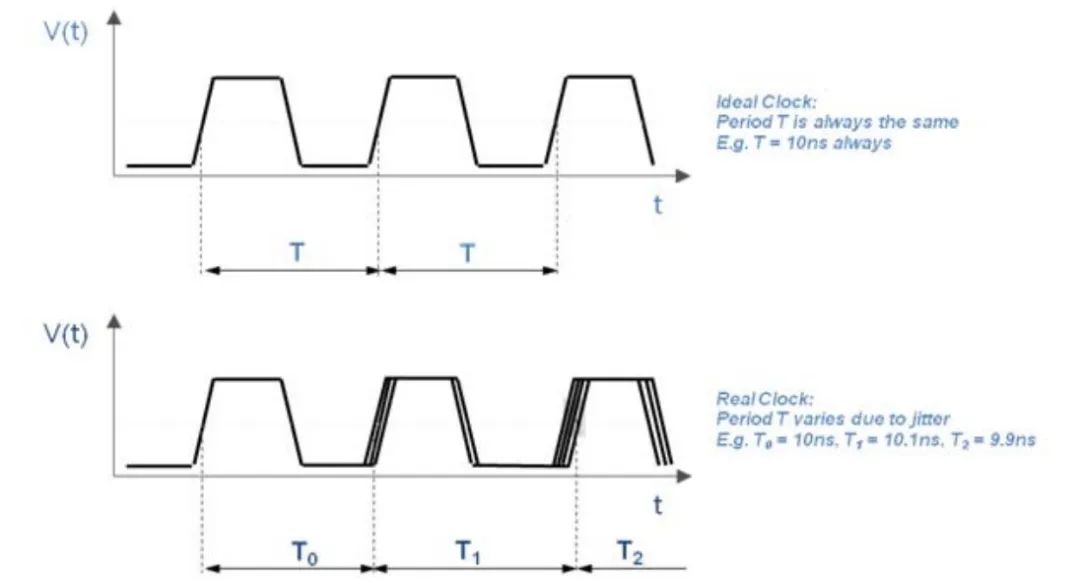
圖3 抖動在時鐘域的體現(xiàn)以及周期相位的變化
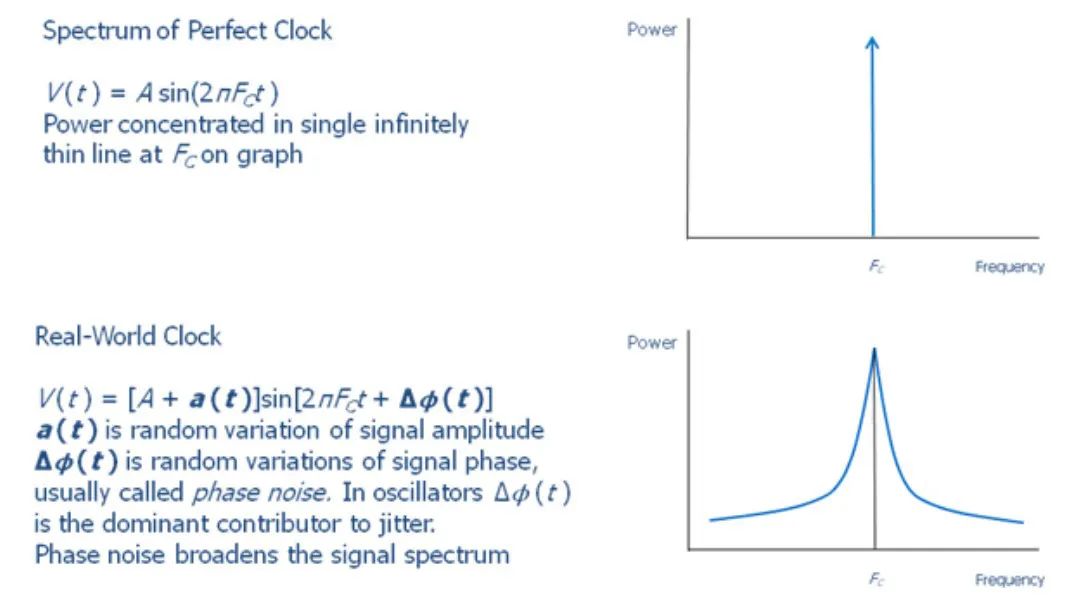
圖4 抖動在頻域的體現(xiàn):能量積分
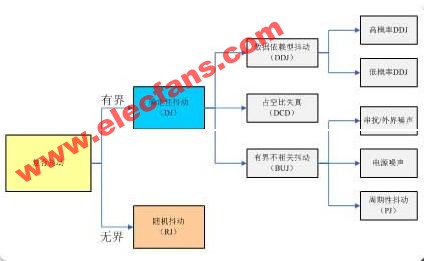
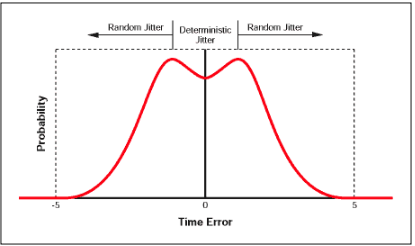
量化時域抖動 總抖動 (TJ) 等于確定性抖動 (DJ) 和隨機(jī)抖動 (RJ) 之和。確定性抖動的常見來源是串音和同步輸出切換。DJ 的峰對峰值是有限的,可以通過精心設(shè)計最小化,例如良好的 PCB 布線。DJ 的作用是為 RJ 的值增加一個偏移量。隨機(jī)抖動 (通常是由于熱噪聲和其他不相關(guān)的噪聲源) 是不可預(yù)測的,通常跟隨一個高斯分布或正態(tài)分布,如下圖 (圖5) 所示:
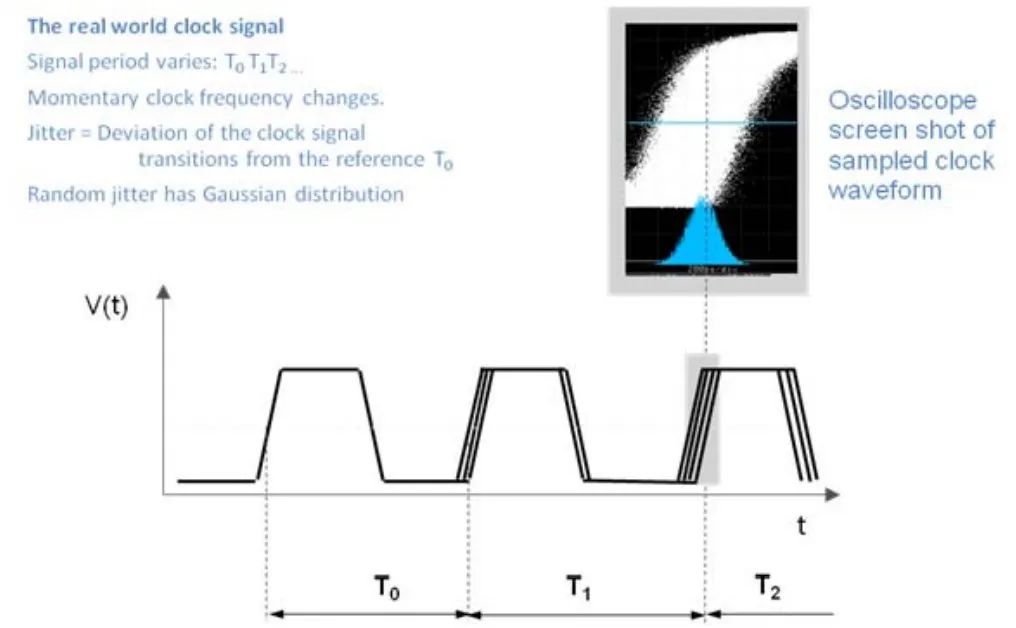
圖5 隨機(jī)抖動
隨機(jī)抖動高度依賴于過程。下圖 (圖6) 表示了隨機(jī)抖動峰間值與樣品值的關(guān)系,與 DJ 不同,RJ 的峰間值為無限的;樣品越多,RJ pk-pk 變化越大。
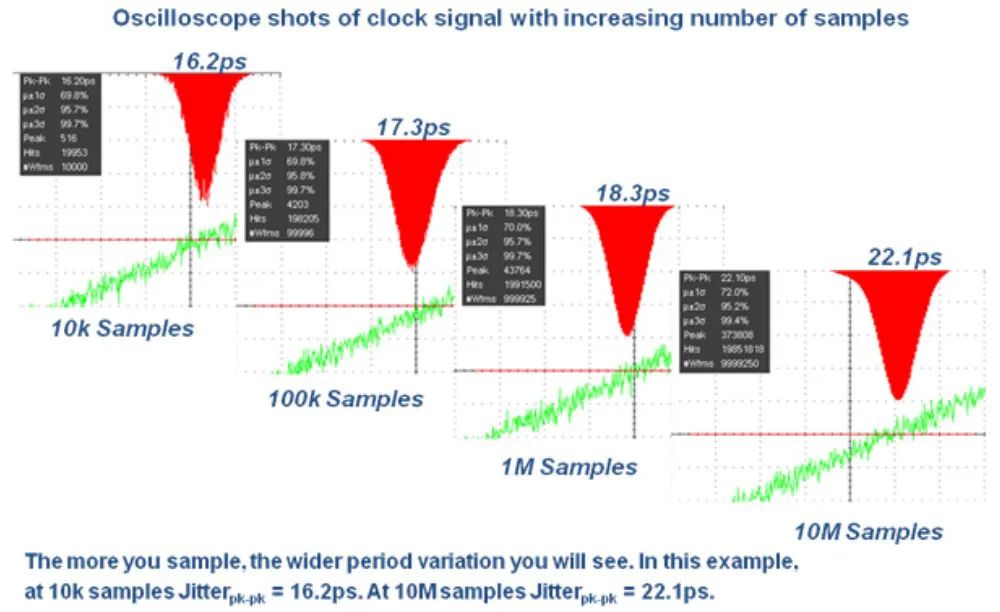
圖6 隨機(jī)抖動峰間值與樣品值的關(guān)系
量化隨機(jī)抖動的方法:均方根和峰對峰
周期抖動是時鐘周期相對于平均時鐘周期的短期變化。如果平均或參考周期為 To,則取周期抖動的采樣為 T1-To,T2-To,T3-To... 以此類推,直到 10000 個樣品 (JEDEC 標(biāo)準(zhǔn) JESD65B)。將這些抖動樣本繪制成直方圖很可能會得到正態(tài)分布,如下圖 (圖7) 所示。理想情況下,抖動的平均值 μ 為零。μ 左邊的值表示小于參考周期的時鐘周期,和右側(cè)的值大于參考時鐘周期。μ (深藍(lán)色) 的每邊標(biāo)準(zhǔn)差為 1σ,約占抖動樣本的 68%。而 μ (medium) ± 2σ ± 3σ (淺、中、深藍(lán)) 約占 95%,±3σ (淺、中、深藍(lán)) 約占 99.7%。
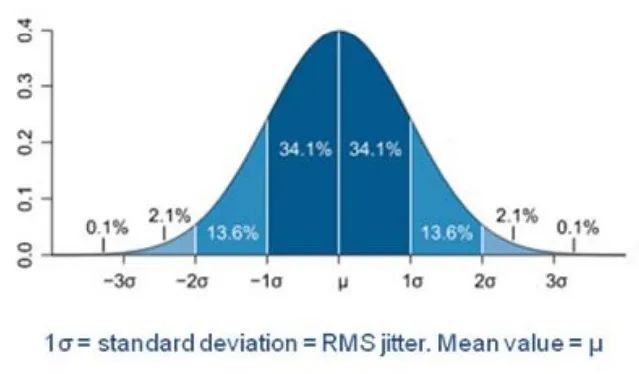
圖7 周期抖動樣本
正態(tài)分布產(chǎn)生兩種常見的抖動規(guī)格
均方根抖動 (RJRMS) 或一個標(biāo)準(zhǔn)差的值 σ。因為這個值幾乎不隨數(shù)字變化對于樣本的增加,它被認(rèn)為是一個更有意義的測量。然而它只在純高斯下有效分布 (沒有確定性抖動)。
峰對峰抖動或正常曲線上從最小到最大測量的距離。在大多數(shù)電路中值隨著采樣次數(shù)的增而增加 (如圖6)。為了得到一個有意義的峰對峰抖動值誤碼率 (BER) 也需要指定。
RMS抖動與峰間抖動和誤碼率的關(guān)系
在上圖 (圖7) 中,我們可以看到,在 6σ (平均值 ±3σ) 或 6xRJRMS 的峰對峰范圍內(nèi),大約有 99.7% 的抖動樣本都是有原因的。要解釋 100% 的抖動樣本是不可能的 — 高斯分布的故事延伸到無窮大。是什么決定峰對峰抖動是 6×RJRMS,7×RJRMS,還是 12×RJRMS?實現(xiàn)這一目標(biāo)的有效方法是基于系統(tǒng)所需的誤碼率 (BER)。假設(shè)任何樣本落在峰對峰范圍之外會導(dǎo)致比特誤差。因此如果要求 BER 目標(biāo)為 10-12,則有必要進(jìn)行選擇除了 0.0000000001% 的時間外,該范圍將包含所有時間的抖動。要使用此方法將 RMS 抖動轉(zhuǎn)換為峰對峰抖動,只需將 RMS 乘以對應(yīng)下圖 (圖8) 中 N 值適當(dāng)?shù)恼`碼率:
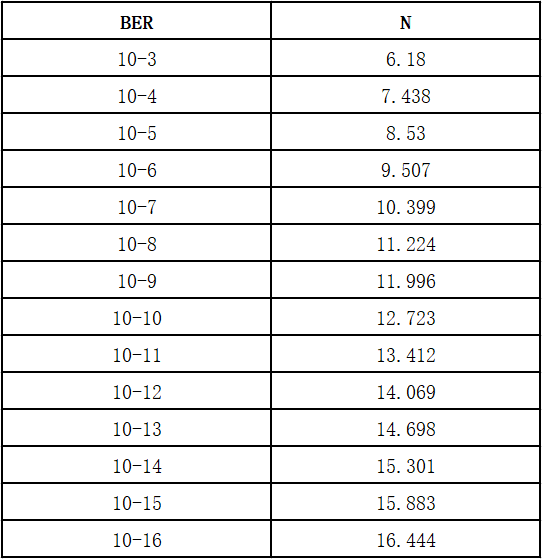
圖8 誤碼率和均方根乘法器 N
例如 RJRMS=4ps,系統(tǒng)誤碼率要求為 1×10-12,對應(yīng)的峰間抖動四舍五入為:RJ pk-pk=4x14.069=56.4ps。這個數(shù)字給了我們一個允許抖動預(yù)算的概念。粗略地說,如果 a 中的各種隨機(jī)抖動源,通信鏈路加起來不超過 56.4ps,那么誤碼應(yīng)小于 1×10-12。
預(yù)測與測量的峰對峰抖動
峰對峰抖動通常用兩種方式描述:它可以按照前面使用 RMS 乘數(shù)的方式計算,這是基于一個定義的峰間抖動的預(yù)測誤碼率 (通常為 1×10-12)。或者可以使用測試設(shè)備進(jìn)行測量。在這種情況下,采樣的最小周期從最大周期中減去測量。正如我們之前所看到的,這取決于采樣的數(shù)量。
預(yù)測值和實測值將不相同。測量值會給人一種系統(tǒng)抖動的感覺,但是相對于 BER 有些無意義。例如從 10,000 個樣本中測量的峰對峰抖動不會告訴 BER 所需的峰間抖動 =1x1012,至少需要 1,000,000,000,000 個樣本來完成此操作。因此 RJ pk-pk 通常根據(jù)定義的誤碼率從 RJRMS 計算。
量化頻域抖動:相位噪聲
正如前文中提到的,相位噪聲描述了頻域的抖動。接下來我們將從相位中看到在噪聲信息中,提取 RMS 相位抖動值,該值通常在數(shù)據(jù)手冊中給出,作為質(zhì)量和性能的度量光譜純度。下圖 (圖9) 中的頻譜圖是一個標(biāo)稱頻率為 FC (也稱為載波頻率) 的真實正弦時鐘,加上邊帶偏移噪聲頻率 FO。這意味著有時時鐘會有稍微大一點的頻率 FC+FO 和有時它會有一個稍低的頻率 FC-FO。頻率的微小變化表現(xiàn)為時鐘的相移波形,因此稱為相位噪聲。

圖9 頻譜圖
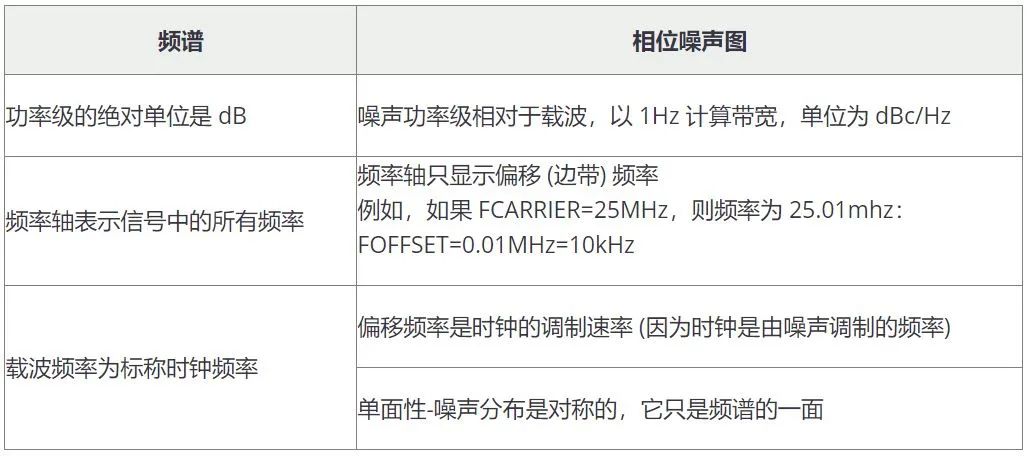
與載波頻率 FC 的功率相比,在偏移頻率 FO 的 1Hz 頻帶中的噪聲功率稱為 dBc,相位噪聲的實際單位是 dBc/Hz,因為功率歸一化到 1Hz 帶寬 (相位噪聲:dBc=相對于載波的 dB 功率)。

頻譜和相位噪聲圖的區(qū)別
RMS Phase Jitter
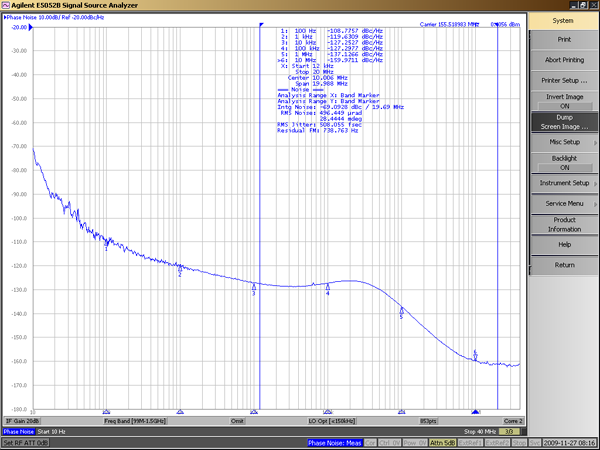
下圖 (圖10) 為 311MHz 振蕩器的相位噪聲圖,在觀察振蕩器相位噪聲圖時,需要注意某些邊帶頻率范圍。
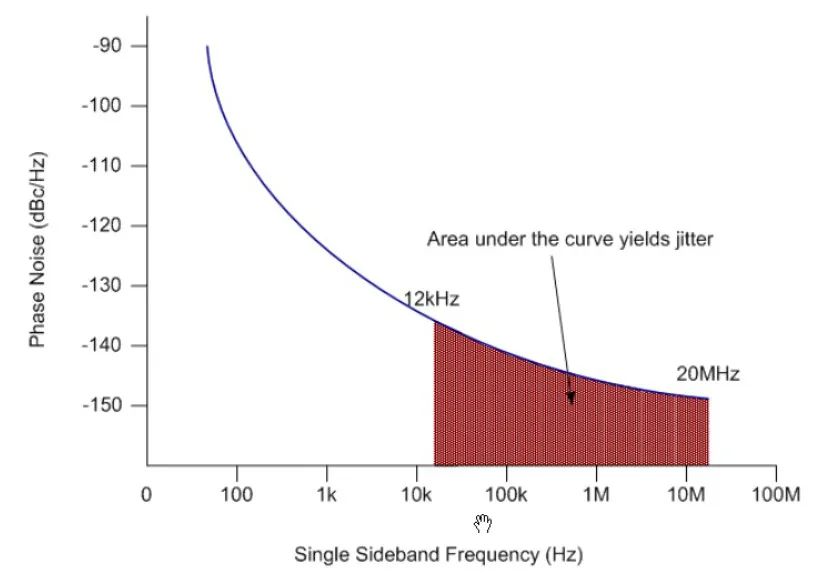
圖10 311MHz 振蕩器的相位噪聲圖
在電信行業(yè),噪音 12kHz 至 20MHz 范圍內(nèi)的功率對定時性能非常重要,具體可參照上圖 (圖8):Noise Power (dBc) = Area under curve from 12kHz to 20MHz = -63dBc。由噪聲功率 N 可以計算出以弧度為單位的 RMS 相位抖動值,公式如下:

以弧度為單位的抖動值可以轉(zhuǎn)換為以秒為時間單位的 RMS 抖動:
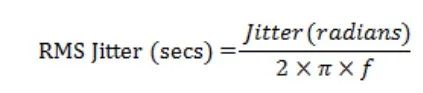
在此例中,振蕩器頻率 f=311MHz,所以可以得到:

當(dāng)抖動來自相位噪聲圖時,計算抖動的邊帶頻率間隔必須始終為指定。
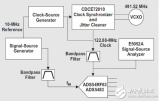
以下為大家進(jìn)行舉例說明:根據(jù)下圖 (圖11) 的 FPGA 規(guī)格參數(shù)要求,StratixV 的時鐘輸出來為 Broadcom 時鐘,Phy 時鐘要求輸入指定為 1.5ps RMS 最大值。
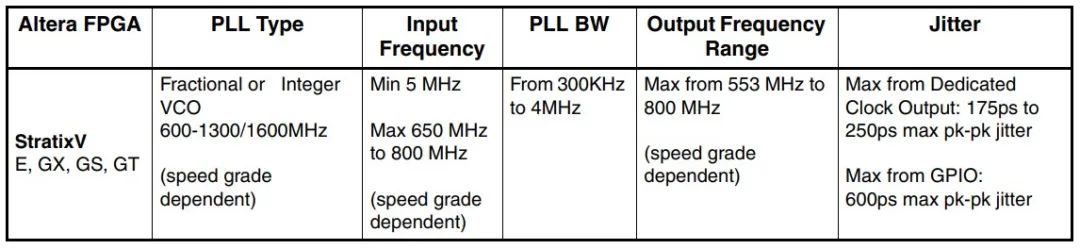
圖11 FPGA 規(guī)格參數(shù)要求
1GE (千兆以太網(wǎng)) 的誤碼率要求為 1×10-12。根據(jù)上圖 (圖8),pk-pk 抖動大約等于 14 倍 RMS 抖動,因此可得出:
StratixV jitter (min) = 175/14 = 12.5ps RMS
StratixV jitter (max) = 250/14 = 17.9ps RMS
總結(jié)
本文為大家介紹了抖動的類型和概念,分別說明了量化時域抖動、隨機(jī)抖動和頻域抖動的方法。
-
抖動
+關(guān)注
關(guān)注
1文章
69瀏覽量
19104 -
相位噪聲
+關(guān)注
關(guān)注
2文章
185瀏覽量
23246 -
頻域
+關(guān)注
關(guān)注
1文章
91瀏覽量
26576 -
隨機(jī)變量
+關(guān)注
關(guān)注
0文章
11瀏覽量
6511
原文標(biāo)題:深入理解時鐘抖動 Jitter
文章出處:【微信號:駿龍電子,微信公眾號:駿龍電子】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
時鐘抖動和相噪及其測量方法
抖動的概念和抖動的測量方法

抖動/歪斜,抖動/歪斜是什么意思
時鐘抖動的基礎(chǔ)
信號抖動的分類與測量

相位抖動是從哪來的?通信中有哪些抖動?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論