") 物聯(lián)網(wǎng)系統(tǒng)中的高精度測距方案_單點TOF激光雷達(dá)
物聯(lián)網(wǎng)系統(tǒng)中的高精度測距方案_單點TOF激光雷達(dá)

物聯(lián)網(wǎng)系統(tǒng)中為什么要使用單點TOF激光雷達(dá)
物聯(lián)網(wǎng)系統(tǒng)中使用單點TOF(Time of Flight,飛行時間)激光雷達(dá)的原因主要基于其獨(dú)特的優(yōu)勢和應(yīng)用場景的需求。以下是詳細(xì)的解釋:
單點TOF激光雷達(dá)的優(yōu)勢
高精度測距:
TOF激光雷達(dá)通過測量光脈沖往返目標(biāo)的時間來計算距離,這種方法能夠提供高精度的距離數(shù)據(jù)。在物聯(lián)網(wǎng)系統(tǒng)中,精確的距離測量是許多應(yīng)用的基礎(chǔ),如自動導(dǎo)航、環(huán)境建模和路徑規(guī)劃等。
抗干擾能力強(qiáng):
由于使用主動光源,TOF激光雷達(dá)在光源不傷害人眼的情況下,抗干擾能力相對較強(qiáng)。這意味著它可以在復(fù)雜的環(huán)境中穩(wěn)定工作,減少因外部干擾而導(dǎo)致的誤差。
成本相對較低:
相比于其他類型的激光雷達(dá),如相干探測激光雷達(dá),TOF激光雷達(dá)的系統(tǒng)構(gòu)建相對簡單,因此成本也相對較低。這對于大規(guī)模部署在物聯(lián)網(wǎng)系統(tǒng)中的設(shè)備來說是一個重要的考慮因素。
探測距離靈活:
TOF激光雷達(dá)的探測距離可以根據(jù)需求進(jìn)行調(diào)節(jié),通過調(diào)整光源的強(qiáng)度或接收器的靈敏度,可以實現(xiàn)從短距離到中長距離的不同探測需求。
物聯(lián)網(wǎng)系統(tǒng)中的應(yīng)用需求
環(huán)境感知:
物聯(lián)網(wǎng)系統(tǒng)需要實時感知周圍環(huán)境的變化,包括障礙物的位置、形狀和大小等。單點TOF激光雷達(dá)能夠提供精確的距離信息,幫助系統(tǒng)構(gòu)建環(huán)境的三維模型,從而實現(xiàn)精準(zhǔn)的環(huán)境感知。
自主導(dǎo)航:
在自動駕駛、機(jī)器人等領(lǐng)域,自主導(dǎo)航是物聯(lián)網(wǎng)系統(tǒng)的重要功能之一。單點TOF激光雷達(dá)可以通過測量與周圍物體的距離,為系統(tǒng)提供導(dǎo)航所需的精確位置信息,幫助系統(tǒng)實現(xiàn)自主避障和路徑規(guī)劃。
安全監(jiān)控:
在安全監(jiān)控領(lǐng)域,物聯(lián)網(wǎng)系統(tǒng)需要實時監(jiān)測特定區(qū)域的安全狀況。單點TOF激光雷達(dá)可以部署在關(guān)鍵位置,通過測量與周圍物體的距離變化來檢測潛在的入侵行為或異常情況。
工業(yè)測量:
在工業(yè)自動化領(lǐng)域,用于精確測量物體的位置和尺寸。
綜上所述,物聯(lián)網(wǎng)系統(tǒng)中使用單點TOF激光雷達(dá)的原因在于其高精度測距、抗干擾能力強(qiáng)、成本相對較低以及探測距離靈活等優(yōu)勢。這些優(yōu)勢使得單點TOF激光雷達(dá)成為物聯(lián)網(wǎng)系統(tǒng)中實現(xiàn)環(huán)境感知、自主導(dǎo)航和安全監(jiān)控等功能的重要工具。同時,隨著技術(shù)的不斷進(jìn)步和成本的進(jìn)一步降低,單點TOF激光雷達(dá)在物聯(lián)網(wǎng)系統(tǒng)中的應(yīng)用前景將更加廣闊。
本文會再為大家詳解激光雷達(dá)家族中的一員——單點TOF激光雷達(dá)。
激光雷達(dá)介紹
激光雷達(dá)最基本的工作原理與無線電雷達(dá)沒有區(qū)別,即由雷達(dá)發(fā)射系統(tǒng)發(fā)送一個信號,打到被測目標(biāo)物上,引起散射,經(jīng)目標(biāo)反射后被接收系統(tǒng)收集,通過測量反射光的運(yùn)行時間而確定目標(biāo)的距離。
至于目標(biāo)的徑向速度,可以由反射光的多普勒頻移來確定,也可以測量兩個或多個距離,并計算其變化率而求得速度,這也是直接探測型雷達(dá)的基本工作原理。激光雷達(dá)的作用就是精確測量目標(biāo)的位置(距離與角度)、形狀(大小)及狀態(tài)(速度、姿態(tài)),從而達(dá)到探測、識別、跟蹤目標(biāo)的目的。激光雷達(dá)是一種雷達(dá)系統(tǒng),是一種主動傳感器,所形成的數(shù)據(jù)是點云形式。其工作光譜段在紅外到紫外之間,主要發(fā)射機(jī)、接收機(jī)、測量控制和電源組成。
如今,激光雷達(dá)已被廣泛應(yīng)用于機(jī)器人、無人駕駛、AR/VR、3D打印等多個領(lǐng)域,根據(jù)應(yīng)用領(lǐng)域的不同,激光雷達(dá)的類型也存在一定差異,機(jī)器人是目前激光雷達(dá)應(yīng)用最為火熱的領(lǐng)域之一。
激光雷達(dá)測距原理
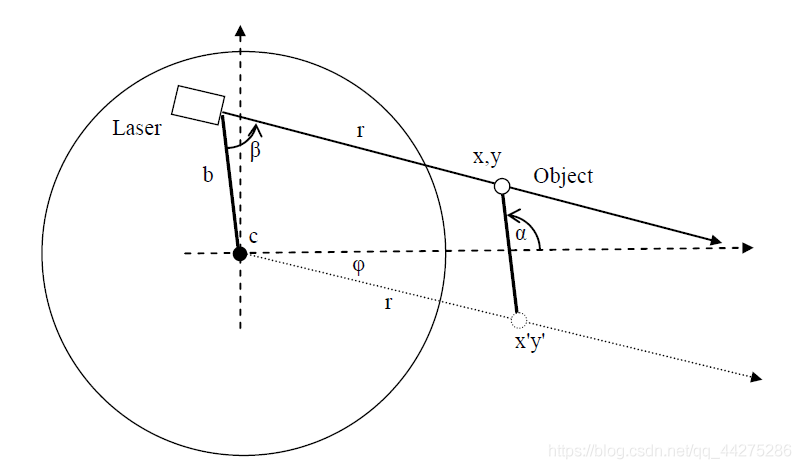
1、三角測距原理
三角測距原理如上圖:


這樣就可得到物體到激光發(fā)射器的距離 d dd 了,激光雷達(dá)將這樣的發(fā)射器和接收器組裝在一起,經(jīng)過機(jī)械旋轉(zhuǎn)360°即可得到一周障礙物的距離。
2、TOF測距原理
由三角測距的計算公式不難發(fā)現(xiàn),當(dāng)距離 d dd 很大時,每變化 δ d delta dδd 引起的 x xx 變化很小,導(dǎo)致精度下降,這就限制了測量范圍。
而TOF(Time of flight)原理克服了測量距離這一難點,并且提高了精度:
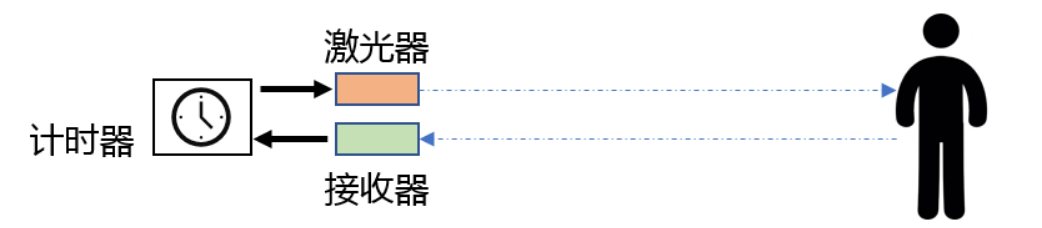
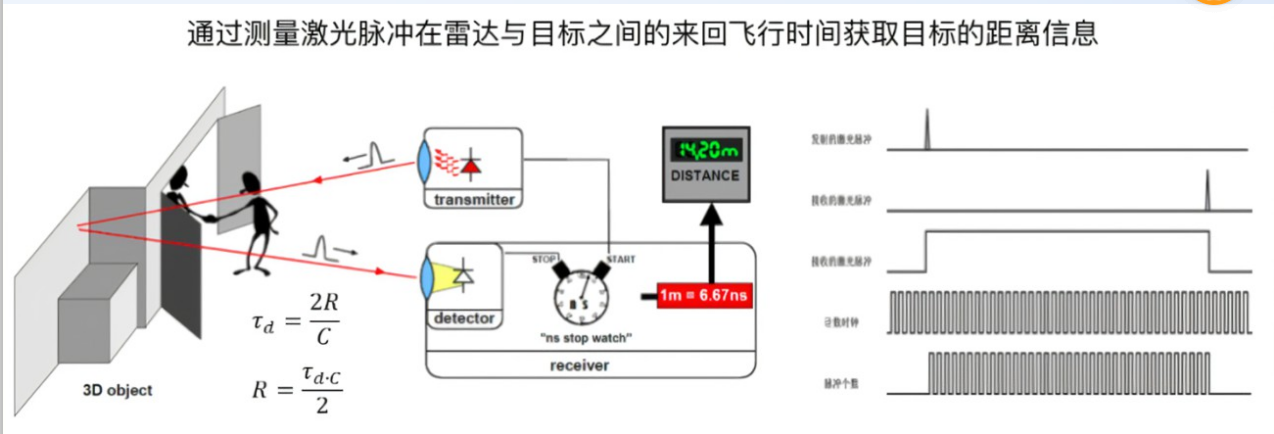
TOF原理十分簡單,就是利用光速測距。首先激光發(fā)射器發(fā)射激光脈沖,計時器記錄發(fā)射時間;脈沖經(jīng)物體反射后由接收器接受,計時器記錄接受時間;時間差乘上光速即得到距離的兩倍。
TOF原理看似簡單,但是實現(xiàn)起來確有很多難點:
計時問題:由于光速過快,測量時間會變得很短。據(jù)網(wǎng)上數(shù)據(jù)得:1cm的測量距離對應(yīng)65ps的時間跨度。這需要計時器的精確度很高。
脈沖問題:發(fā)射器需要發(fā)射高質(zhì)量的脈沖光,接收器接受脈沖光的時候需要盡量保持信號不失真。
對于同一距離的物體測距時,得到的回波信號可能不一樣,如下圖的黑白紙,這就需要特殊的處理方式來處理。但總的來說TOF原理的精度遠(yuǎn)遠(yuǎn)超過三角測距,只是由于諸多難點導(dǎo)致成本略高。像大一立項時因為沒錢,所以用的三角測距的思嵐A1,精度不是很高。而ROBOCON戰(zhàn)隊里的sick激光雷達(dá)就是TOF原理,精度非常高,貴是有道理的。
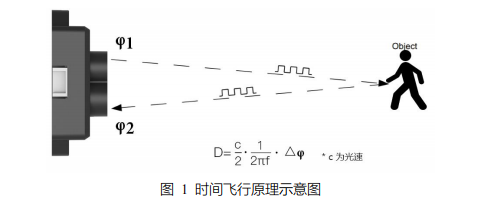
單點激光雷達(dá)是基于TOF即時間飛行法,采用相位法實現(xiàn)測距功能。產(chǎn)品發(fā)出經(jīng)調(diào)制的近紅外光,遇物體后反射,單點激光雷達(dá)通過計算調(diào)制紅外光的發(fā)射、反射后產(chǎn)生的相位差,來換算與被測目標(biāo)物體之間的距離,以產(chǎn)生深度信息。
單點激光雷達(dá)具有IP65高防塵防水等級,抗強(qiáng)光干擾。它體積小,操作簡單,能精準(zhǔn)探測快速移動車輛,準(zhǔn)確性高達(dá)99%。單點激光雷達(dá)無需具備2D激光雷達(dá)的二次開發(fā)能力,內(nèi)置獨(dú)立算法可同時測出車速、車長、車寬、車高等多項數(shù)據(jù),成本較低,后期維修簡單,整體性價比非常高。
tof激光雷達(dá)原理
單點TOF激光雷達(dá)選型參數(shù)
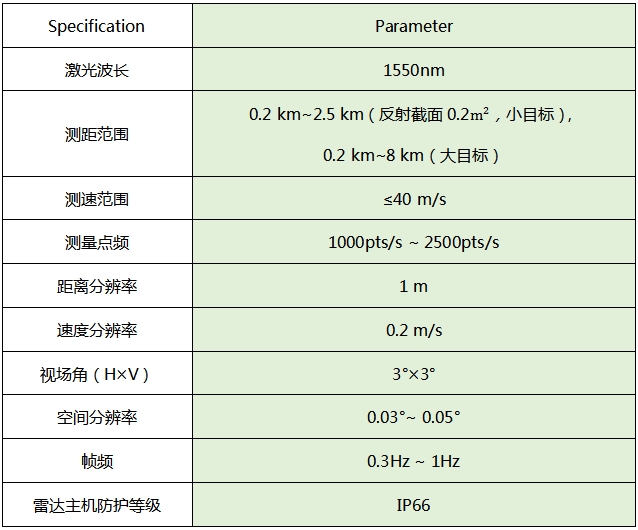
單點TOF激光雷達(dá)的選型參數(shù)通常包括以下幾個方面:
測量范圍:這是激光雷達(dá)能夠測量的最大和最小距離。例如,某些型號可能具有20米至180米不等的測量范圍。
測量精度:指激光雷達(dá)測量距離的準(zhǔn)確度,通常以厘米為單位表示,如±3cm或±5cm。
測量頻率:即激光雷達(dá)每秒能夠進(jìn)行的測量次數(shù),這決定了其響應(yīng)速度和數(shù)據(jù)處理能力。常見的測量頻率范圍從幾百Hz到幾千Hz不等。
抗環(huán)境光能力:表示激光雷達(dá)在強(qiáng)光環(huán)境下的工作能力,通常以Klux為單位表示,如100Klux。
激光束發(fā)散角和接收視場角:這兩個參數(shù)影響激光雷達(dá)的探測范圍和精度。發(fā)散角越小,激光束越集中;接收視場角越大,激光雷達(dá)能夠接收到的反射光范圍越廣。
激光波長:常見的激光波長有850nm和905nm等,不同波長的激光在穿透力和反射特性上有所不同。
防護(hù)等級:表示激光雷達(dá)的防塵防水能力,如IP65等級表示設(shè)備能夠防止灰塵進(jìn)入并具有一定的防水能力。
供電電壓和功耗:這些參數(shù)決定了激光雷達(dá)的能源需求和續(xù)航能力。
通信接口:包括LVTTL、TTL、IIC、RS232、RS485等多種類型,用于與控制系統(tǒng)進(jìn)行數(shù)據(jù)交換。
單點TOF激光雷達(dá)使用注意事項
環(huán)境評估:在使用前評估環(huán)境的光照和氣象狀況,確保激光雷達(dá)能夠在正常條件下工作。
避免遮擋:盡量選擇開闊的測量位置,減少高墻、大樹等遮擋物的干擾。
目標(biāo)識別:確保正確識別目標(biāo),并根據(jù)目標(biāo)表面特性選擇合適的測量模式。
固定角度:保持激光雷達(dá)與目標(biāo)之間的固定角度,避免角度變化過大導(dǎo)致測距誤差增大。
安全使用:激光雷達(dá)發(fā)出的激光束可能對眼睛和皮膚造成傷害,因此在使用時應(yīng)佩戴適當(dāng)?shù)姆雷o(hù)裝備。
單點TOF激光雷達(dá)優(yōu)缺點
優(yōu)點:
高精度:能夠?qū)崿F(xiàn)亞毫米級的測量精度。
高速度:能夠以很高的速率進(jìn)行測量,適用于高速移動物體的測距。
大測量范圍:測量范圍通常較大,適用于不同距離范圍內(nèi)的測量需求。
抗干擾能力強(qiáng):對光照、顏色和表面反射性質(zhì)的影響較小。
構(gòu)造簡單:由較少的光學(xué)和電子元件組成,易于制造和集成。
缺點:
成本較高:相對于其他測距技術(shù),單點TOF激光雷達(dá)的成本較高。
受多路徑干擾影響:當(dāng)光脈沖與目標(biāo)物體的反射光同時經(jīng)過多個路徑到達(dá)傳感器時,會影響測量精度。
功耗較大:在進(jìn)行高速測量時需要較大的能量消耗。
視場較小:只能測量單個點的距離,不能提供目標(biāo)物體的三維形狀信息。
單點TOF激光雷達(dá)廠商
目前市場上有多家生產(chǎn)單點TOF激光雷達(dá)的廠商,如杭州光珀智能科技有限公司、氪見(南京)科技有限公司、蘇州鐳智傳感科技有限公司等。這些廠商在激光雷達(dá)領(lǐng)域具有豐富的技術(shù)積累和產(chǎn)品研發(fā)經(jīng)驗,能夠提供高質(zhì)量的單點TOF激光雷達(dá)產(chǎn)品。請注意,以上列舉的廠商僅供參考,具體選擇時還需根據(jù)實際需求進(jìn)行評估和比較。
供應(yīng)商A:北醒(北京)光子科技
1、產(chǎn)品能力
對應(yīng)的產(chǎn)品詳情介紹
產(chǎn)品功能
TFmini-I2C 是一款小型激光雷達(dá)模組。主要實現(xiàn)實時、無接觸式的距離測量功能,具有測量準(zhǔn)
確、穩(wěn)定、高速的特點。
測距原理
TFmini-I2C 基于 TOF(Time of Flight)即飛行時間原理。具體為產(chǎn)品周期性的向外發(fā)出近紅外
光調(diào)制波,調(diào)制波遇物體后反射。產(chǎn)品通過測量調(diào)制波往返相位差,得到飛行時間,再計算出產(chǎn)品
與被測目標(biāo)之間的相對距離,如圖 1 所示。
關(guān)鍵特性參數(shù)
參數(shù)名稱 參數(shù)值
測距范圍 0.3m~12m①
測量準(zhǔn)確度 ±6cm@(0.3-6m)② ±1%@(6m-12m)
默認(rèn)距離單位 cm
距離分辨力 1cm
接收半角 1.15°
發(fā)射半角 1.5°
測量頻率 100H
2、支撐
(1)技術(shù)產(chǎn)品
技術(shù)資料
本文章源自奇跡物聯(lián)開源的物聯(lián)網(wǎng)應(yīng)用知識庫Cellular IoT Wiki,更多技術(shù)干貨歡迎關(guān)注收藏Wiki:Cellular IoT Wiki 知識庫(https://rckrv97mzx.feishu.cn/wiki/wikcnBvAC9WOkEYG5CLqGwm6PHf)
歡迎同學(xué)們走進(jìn)AmazIOT知識庫的世界!
這里是為物聯(lián)網(wǎng)人構(gòu)建的技術(shù)應(yīng)用百科,以便幫助你更快更簡單的開發(fā)物聯(lián)網(wǎng)產(chǎn)品。
Cellular IoT Wiki初心:
在我們長期投身于蜂窩物聯(lián)網(wǎng) ODM/OEM 解決方案的實踐過程中,一直被物聯(lián)網(wǎng)技術(shù)碎片化與產(chǎn)業(yè)資源碎片化的問題所困擾。從產(chǎn)品定義、芯片選型,到軟硬件研發(fā)和測試,物聯(lián)網(wǎng)技術(shù)的碎片化以及產(chǎn)業(yè)資源的碎片化,始終對團(tuán)隊的產(chǎn)品開發(fā)交付質(zhì)量和效率形成制約。為了減少因物聯(lián)網(wǎng)碎片化而帶來的重復(fù)開發(fā)工作,我們著手對物聯(lián)網(wǎng)開發(fā)中高頻應(yīng)用的技術(shù)知識進(jìn)行沉淀管理,并基于 Bloom OS 搭建了不同平臺的 RTOS 應(yīng)用生態(tài)。后來我們發(fā)現(xiàn),很多物聯(lián)網(wǎng)產(chǎn)品開發(fā)團(tuán)隊都面臨著相似的困擾,于是,我們決定向全體物聯(lián)網(wǎng)行業(yè)開發(fā)者開放奇跡物聯(lián)內(nèi)部沉淀的應(yīng)用技術(shù)知識庫 Wiki,期望能為更多物聯(lián)網(wǎng)產(chǎn)品開發(fā)者減輕一些重復(fù)造輪子的負(fù)擔(dān)。
Cellular IoT Wiki沉淀的技術(shù)內(nèi)容方向如下:
奇跡物聯(lián)的業(yè)務(wù)服務(wù)范圍:基于自研的NB-IoT、Cat1、Cat4等物聯(lián)網(wǎng)模組,為客戶物聯(lián)網(wǎng)ODM/OEM解決方案服務(wù)。我們的研發(fā)技術(shù)中心在石家莊,PCBA生產(chǎn)基地分布在深圳、石家莊、北京三個工廠,滿足不同區(qū)域&不同量產(chǎn)規(guī)模&不同產(chǎn)品開發(fā)階段的生產(chǎn)制造任務(wù)。跟傳統(tǒng)PCBA工廠最大的區(qū)別是我們只服務(wù)物聯(lián)網(wǎng)行業(yè)客戶。
連接我們,和10000+物聯(lián)網(wǎng)開發(fā)者一起降低技術(shù)和成本門檻
讓蜂窩物聯(lián)網(wǎng)應(yīng)用更簡單~~
哈哈你終于滑到最重要的模塊了,
千萬不!要!劃!走!忍住沖動!~
歡迎加入飛書“開源技術(shù)交流群”,隨時找到我們哦~
點擊鏈接如何加入奇跡物聯(lián)技術(shù)話題群(https://rckrv97mzx.feishu.cn/docx/Xskpd1cFQo7hu9x5EuicbsjTnTf)可以獲取加入技術(shù)話題群攻略
Hey 物聯(lián)網(wǎng)從業(yè)者,
你是否有了解過奇跡物聯(lián)的官方公眾號“eSIM物聯(lián)工場”呢?
這里是奇跡物聯(lián)的物聯(lián)網(wǎng)應(yīng)用技術(shù)開源wiki主陣地,歡迎關(guān)注公眾號,不迷路~
及時獲得最新物聯(lián)網(wǎng)應(yīng)用技術(shù)沉淀發(fā)布
(如有侵權(quán),聯(lián)系刪除)
審核編輯 黃宇
-
物聯(lián)網(wǎng)
+關(guān)注
關(guān)注
2930文章
46164瀏覽量
391341 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4226瀏覽量
192647 -
TOF
+關(guān)注
關(guān)注
9文章
500瀏覽量
37268
發(fā)布評論請先 登錄
FMCW激光雷達(dá),加速落地工業(yè)場景
激光雷達(dá)(LiDAR)技術(shù)方案與工作原理全解析

愛普生高精度車規(guī)晶振助力激光雷達(dá)自動駕駛

OptiSystem應(yīng)用:激光雷達(dá)系統(tǒng)設(shè)計
測量精度可達(dá)±1mm的雷達(dá)液位計測距方案
【方案】超高精度和穩(wěn)定性的雷達(dá)液位計方案
全場景適用!TS Spectrum高速數(shù)字化儀在激光雷達(dá)系統(tǒng)中的應(yīng)用
激光雷達(dá)在安防監(jiān)控中的優(yōu)勢
激光雷達(dá)在農(nóng)業(yè)中的創(chuàng)新應(yīng)用
如何提升激光雷達(dá)數(shù)據(jù)的精度
物聯(lián)網(wǎng)系統(tǒng)中高精度RTK定位方案的實現(xiàn)_高精度定位模塊

物聯(lián)網(wǎng)系統(tǒng)中的自動駕駛的“眼睛”_純固態(tài)激光雷達(dá)

如何在激光雷達(dá)和接近檢測中利用高速比較器提高精度

引爆行業(yè)熱潮,飛芯電子相干4D FMCW無人機(jī)偵測激光雷達(dá)震撼發(fā)布!





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論