") 友思特分享 車載同步技術(shù)創(chuàng)新:多相機系統(tǒng)如何實現(xiàn)精準(zhǔn)數(shù)據(jù)采集與實時處理?
友思特分享 車載同步技術(shù)創(chuàng)新:多相機系統(tǒng)如何實現(xiàn)精準(zhǔn)數(shù)據(jù)采集與實時處理?

導(dǎo)讀
車載多相機采集系統(tǒng)是智能駕駛技術(shù)實際應(yīng)用中的“眼睛”,友思特車載圖像采集和回放系統(tǒng)切實提升了系統(tǒng)的實時同步采集與回放能力,為ADAS等應(yīng)用的決策系統(tǒng)提供了可靠的核心數(shù)據(jù)。
視頻流同步采集與智駕技術(shù)發(fā)展
在現(xiàn)代汽車行業(yè)中,智能駕駛技術(shù)正以驚人的速度發(fā)展,引領(lǐng)著交通領(lǐng)域的革新。這一技術(shù)的崛起,不僅改變了傳統(tǒng)駕駛方式,更在安全性、舒適性和效率方面帶來了前所未有的提升。作為智能駕駛技術(shù)的核心組成部分,車載多相機系統(tǒng)發(fā)揮著舉足輕重的作用。它們通過高精度、高速度的圖像捕捉與處理,為車輛提供了全方位、無死角的視覺感知能力,從而極大地增強了駕駛過程中的環(huán)境感知和決策準(zhǔn)確性。
隨著科技的不斷進(jìn)步,車載多相機系統(tǒng)也在不斷升級和完善,以適應(yīng)更為復(fù)雜多變的駕駛場景。為了實現(xiàn)高級駕駛輔助系統(tǒng)(ADAS)和自動駕駛的精準(zhǔn)功能,車載多相機系統(tǒng)必須確保視頻流的同步采集。車輛上傳感器和相機數(shù)量的不斷增多的現(xiàn)狀,對視頻流的實時處理和數(shù)據(jù)融合技術(shù)也提出了更為嚴(yán)苛的要求。這種技術(shù)的創(chuàng)新,不僅關(guān)乎車輛的安全性能,更在自動駕駛的精確感知與決策中發(fā)揮著不可或缺的作用。因此,探索先進(jìn)的同步采集方案,以實現(xiàn)車載多相機系統(tǒng)數(shù)據(jù)的高效處理,已成為推動智能駕駛技術(shù)發(fā)展的當(dāng)務(wù)之急。
圖1. 車載多相機數(shù)采系統(tǒng)(圖片來源:Solectrix官網(wǎng) https://solectrix.de/en/)
為了適配智能駕駛技術(shù)的數(shù)采要求,市場上各色的采集板卡、采集系統(tǒng)和方案層出不窮。首先為了同時采集多路實時視頻數(shù)據(jù),采集板卡/系統(tǒng)對通道數(shù)量進(jìn)行了拓展,從傳統(tǒng)的一兩路視頻數(shù)據(jù),拓展至4/6/8/16路視頻數(shù)據(jù);在異步的場合,基于先前收集的真實環(huán)境數(shù)據(jù)或仿真的自動駕駛數(shù)據(jù),板卡/系統(tǒng)需要回放帶有時間戳的視頻數(shù)據(jù),用于諸如硬件在環(huán)(HiL)測試的場合,同時也對通道數(shù)量進(jìn)行了拓展;在同步的場合,采集數(shù)據(jù)的同時,需要旁通數(shù)據(jù),將同樣的數(shù)據(jù)鏡像同時分路,用于諸如存儲、處理、顯示等目的,也同樣對通道數(shù)量進(jìn)行了拓展,進(jìn)一步滿足多樣化的需求。下圖為友思特車載采集卡視頻數(shù)據(jù)采集回放經(jīng)典配置:
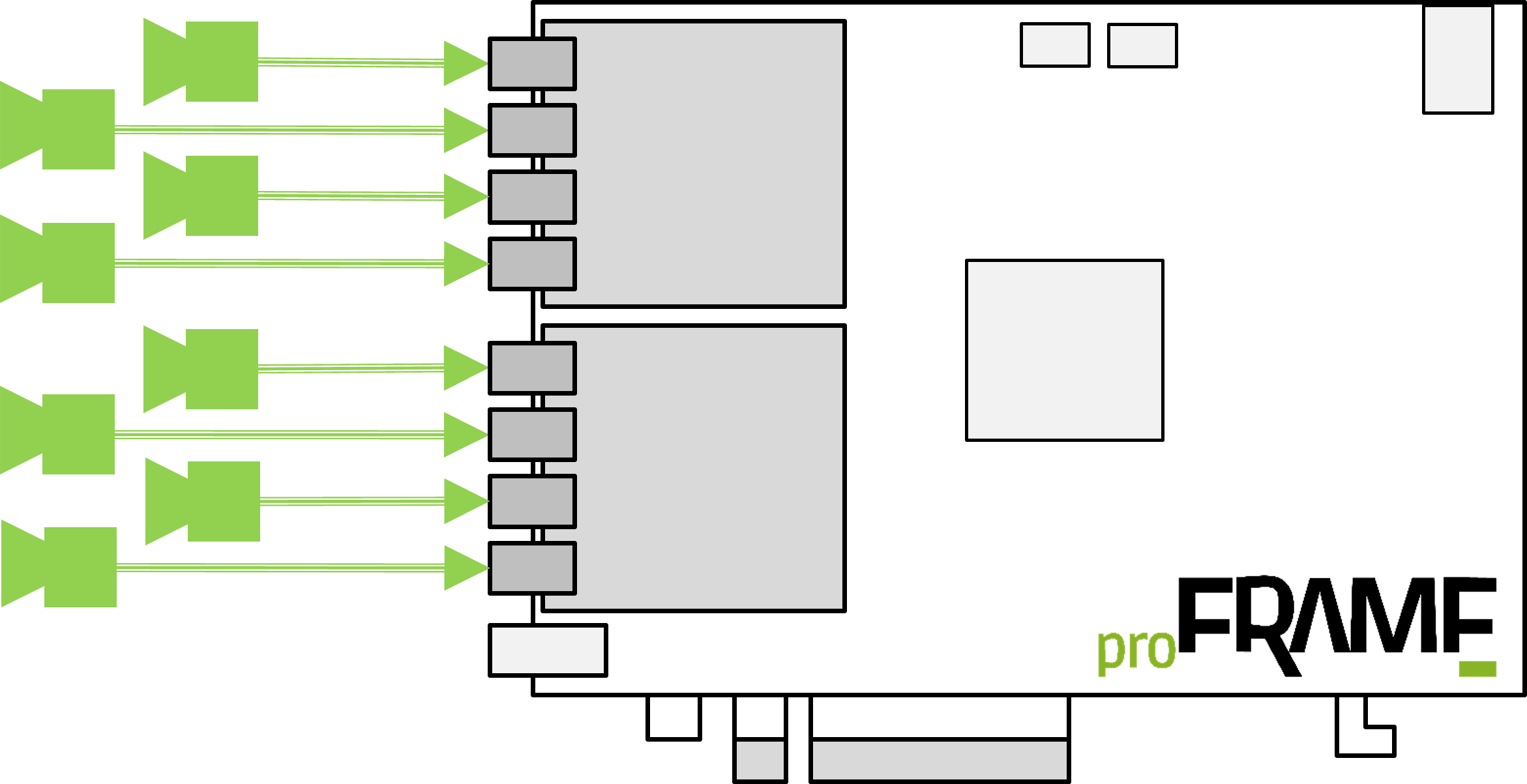 a.采集模式:同時最多8個視頻流
a.采集模式:同時最多8個視頻流 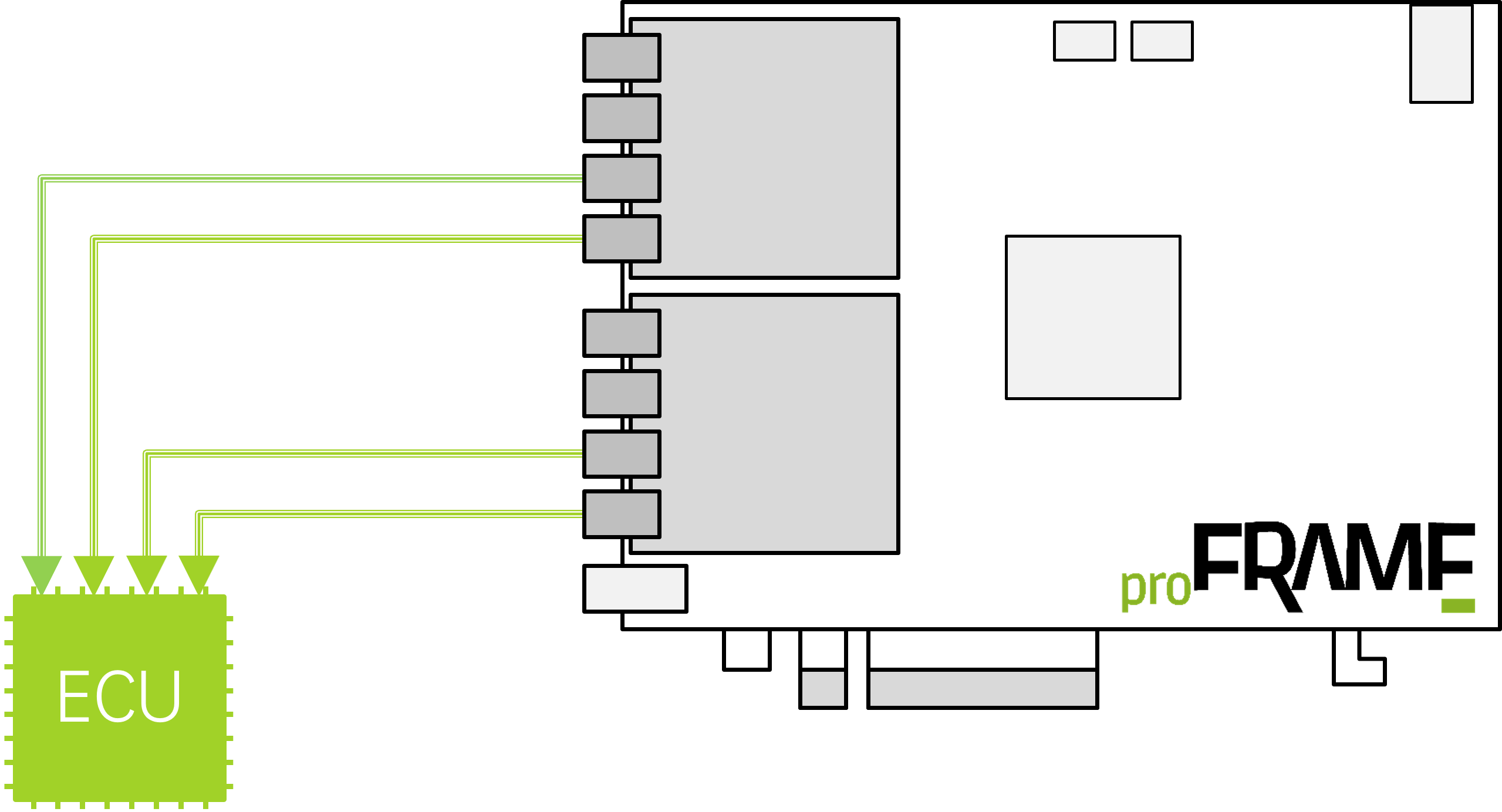 b. 回放模式:同時最多4個視頻流
b. 回放模式:同時最多4個視頻流 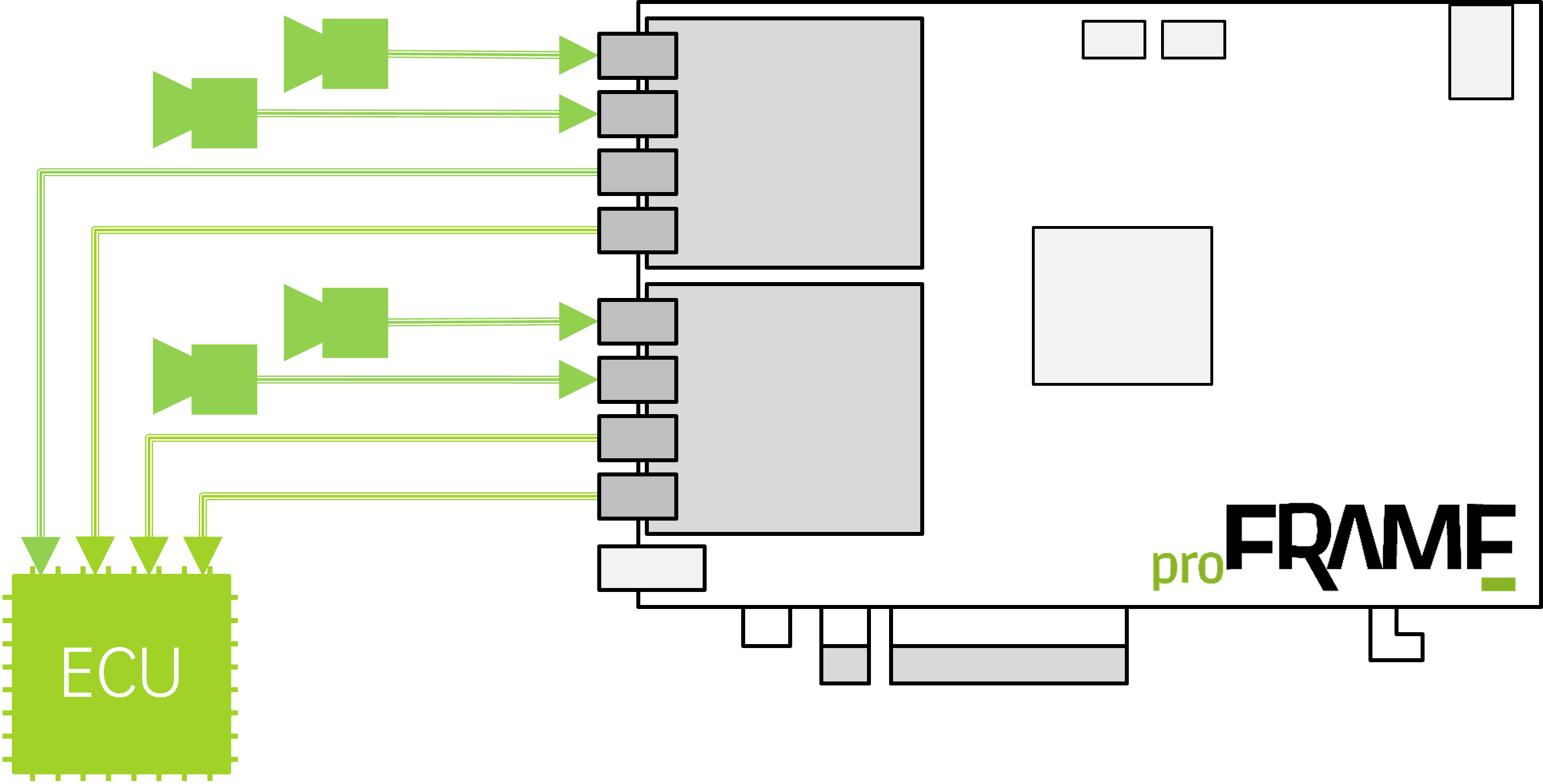 c.TAP模式:同時最多4個視頻流輸入和輸出
c.TAP模式:同時最多4個視頻流輸入和輸出
多路數(shù)據(jù)滿足多相機實時采集的同時,對硬件性能如帶寬、實時性和數(shù)據(jù)傳輸協(xié)議也提出了高要求。在硬件性能上,息息相關(guān)的是最終產(chǎn)品的價格,影響的是產(chǎn)品應(yīng)用過程中的性能上限;而數(shù)據(jù)傳輸協(xié)議,則是關(guān)乎數(shù)據(jù)傳輸實時性、準(zhǔn)確率、實際傳輸速率的核心技術(shù)點。友思特 proFRAME 車載采集和回放板卡,應(yīng)用了SerDes技術(shù),為車載多相機的實時采集和記錄回放提供了一種可行可靠的技術(shù)路線。
SerDes原理結(jié)構(gòu)
SerDes核心包括串行器(Serializer)和解串器(Deserializer),是一種用于高速數(shù)據(jù)傳輸?shù)?a target="_blank">接口技術(shù)。它通過將并行數(shù)據(jù)流轉(zhuǎn)換為串行數(shù)據(jù)流,從而提高數(shù)據(jù)傳輸速率,并在接收端再將串行數(shù)據(jù)流轉(zhuǎn)換回并行數(shù)據(jù)流。核心工作原理包括兩部分:
串行化:SerDes的發(fā)送端(串行器)從本地系統(tǒng)接收并行數(shù)據(jù)作為輸入,通過FIFO傳遞給內(nèi)部的編碼器、擾碼器,然后將其轉(zhuǎn)換為串行數(shù)據(jù)并將其作為單個數(shù)據(jù)流,經(jīng)由均衡器均衡后通過同軸或雙絞線電纜等串行傳輸通道進(jìn)行傳輸。這種方式能顯著提高數(shù)據(jù)傳輸效率。串行化數(shù)據(jù)時,串行器使用參考時鐘的輸入作為編碼過程的一部分,從而最大限度地減少并行傳輸中發(fā)現(xiàn)的時序問題類型。
反串行化:SerDes的接收端(解串器)接收串行數(shù)據(jù)作為輸入,經(jīng)由均衡器均衡,通過CDR(時鐘恢復(fù))恢復(fù)時鐘信號,并將其轉(zhuǎn)換恢復(fù)為對齊的并行數(shù)據(jù)流輸出,以便進(jìn)一步處理。
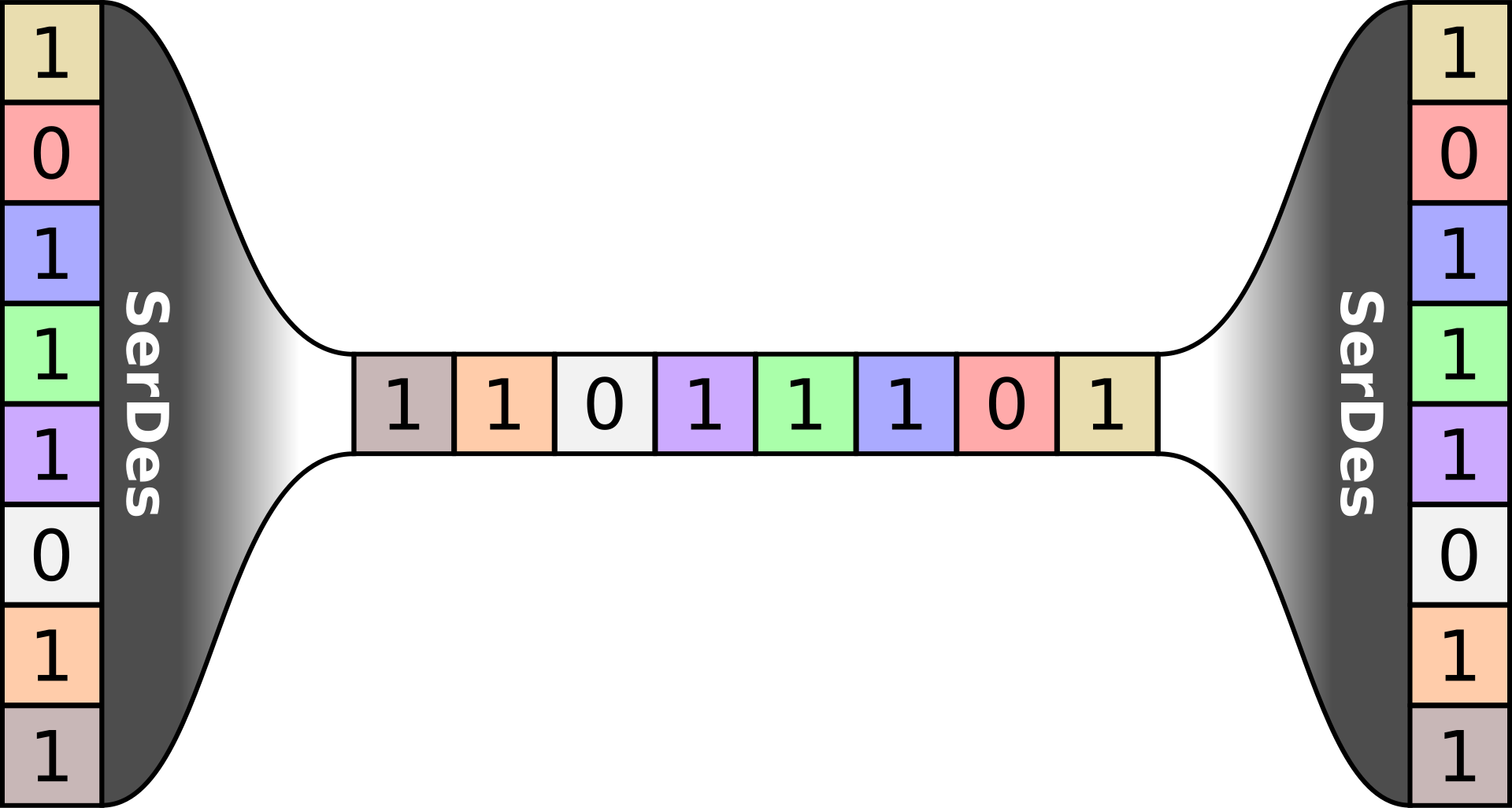 圖3. SerDes原理(圖片來源:維基百科https://en.wikipedia.org/wiki/SerDes)
圖3. SerDes原理(圖片來源:維基百科https://en.wikipedia.org/wiki/SerDes)
SerDes技術(shù)在現(xiàn)代數(shù)據(jù)傳輸中發(fā)揮了關(guān)鍵作用。它通過將高帶寬的并行數(shù)據(jù)流轉(zhuǎn)換為串行信號,實現(xiàn)了更高的數(shù)據(jù)傳輸速率和更長的傳輸距離。此技術(shù)有效減少了電路板上的布線復(fù)雜性,從而降低了系統(tǒng)成本和功耗,并提升了系統(tǒng)的可靠性。SerDes還支持長距離傳輸,增強了信號的抗干擾能力,使得數(shù)據(jù)完整性得以保持。通過優(yōu)化數(shù)據(jù)傳輸路徑和提高速率,SerDes技術(shù)顯著提升了系統(tǒng)性能,廣泛應(yīng)用于通信、計算機和存儲領(lǐng)域,為高效、穩(wěn)定的數(shù)據(jù)傳輸提供了重要保障。
友思特車載圖像采集和回放系統(tǒng)
為了獲取汽車的 360° 全景環(huán)視圖像,需要在汽車的前后左右各設(shè)置一個或多個相機。以分辨率為3840*2160、幀率為60、輸出圖像數(shù)據(jù)格式為 RAW10 為例,單路視頻數(shù)據(jù)傳輸帶寬要求 ≥5 Giga bit/s。
傳輸鏈路①:相機實時獲取的視頻流數(shù)據(jù)→車載 ADAS/AD ECU:
前端 GMSL/FPD-Link 相機的 CMOS 圖像傳感器捕獲光信號并轉(zhuǎn)換為電信號,生成原始圖像數(shù)據(jù)。在相機內(nèi)部經(jīng)過處理(如去噪、增益、色彩校正等)后通過相機的串行芯片進(jìn)行串行化,轉(zhuǎn)為 CSI-2 標(biāo)準(zhǔn)的數(shù)據(jù)格式,通過同軸線纜(Coax)傳輸?shù)?proFRAME 板卡,經(jīng)過相機適配器的解串芯片進(jìn)行解碼,將串行數(shù)據(jù)流恢復(fù)成并行的 CSI-2 圖像數(shù)據(jù)格式,傳送至板卡的 FPGA 模塊進(jìn)行處理。圖像數(shù)據(jù)經(jīng)由板卡的 FPGA 模塊,同步分出兩路數(shù)據(jù),一路數(shù)據(jù)傳輸至 ADAS 數(shù)采設(shè)備存儲記錄,另一路數(shù)據(jù)重新經(jīng)過相機適配器的串行化芯片進(jìn)行串行輸出,通過同軸線纜傳輸?shù)角岸说?ECU 設(shè)備進(jìn)行解串,恢復(fù)成并行圖像數(shù)據(jù),用于可視化或其他調(diào)試處理目的。
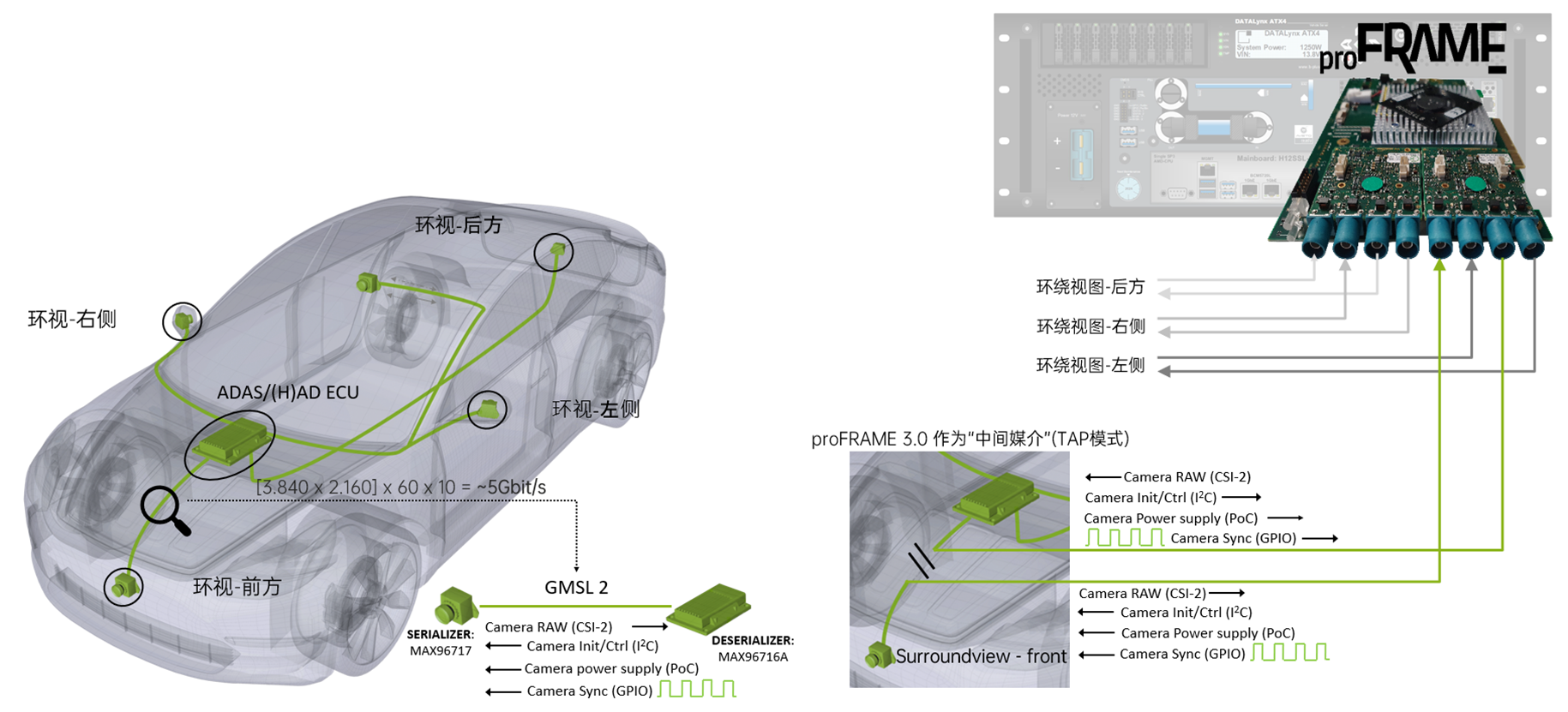 圖4. 多相機數(shù)采系統(tǒng)數(shù)據(jù)傳輸鏈路
圖4. 多相機數(shù)采系統(tǒng)數(shù)據(jù)傳輸鏈路
傳輸鏈路②:車載 ADAS/AD ECU 的相機控制信號→相機:
ECU 的相機控制信號指令(如I2C和GPIO),通過同軸線纜傳輸,經(jīng)由 proFRAME 板卡,多路同時旁通至相機端。I2C 用于設(shè)備間的通信,包括配置相機的工作參數(shù)(如曝光、增益調(diào)整等),GPIO 用于控制相機的行為(如相機的啟停、觸發(fā)拍攝等)。板卡也支持通過同軸線纜給相機供電(PoC)。
友思特 proFRAME 板卡的多路圖像數(shù)據(jù)實時采集和回放功能通過其 TAP 模式實現(xiàn)。TAP(Test Access Point)是一種能夠從傳輸網(wǎng)絡(luò)或系統(tǒng)中分離出數(shù)據(jù)流并用于其他目的的工具,能夠在不干擾主數(shù)據(jù)流的情況下,提供對數(shù)據(jù)進(jìn)行訪問和分析的接口。通過 proFRAME 的 TAP 模式,板卡可以旁通(bypass)多種類型的數(shù)據(jù),包括攜帶高精度時間戳的視頻流、相機控制信號指令、外部觸發(fā)信號和 PoC 供電等。
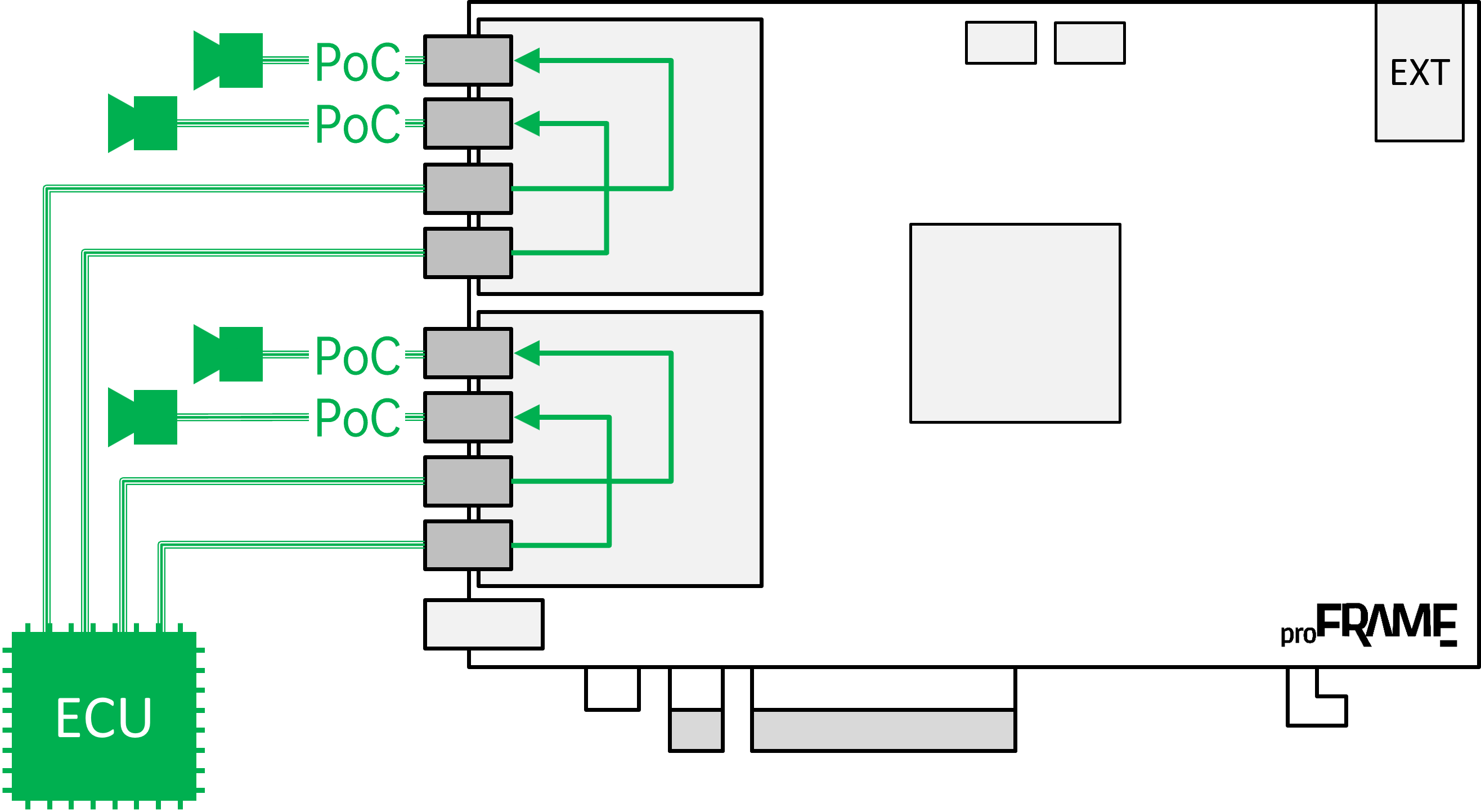 圖5.proFRAME旁通ECU的PoC
圖5.proFRAME旁通ECU的PoC
友思特 proFRAME 板卡提供了3種給相機供電(8V-24V)的方式:
直接主機給板卡供電,板卡通過穩(wěn)壓器將電壓經(jīng)由Coax傳輸至前端相機;
外部電源連接板卡的相機適配器,經(jīng)由相機適配器的Coax傳輸至前端相機;
基于板卡的TAP模式,將ECU提供的PoC旁通至所連接的前端相機。
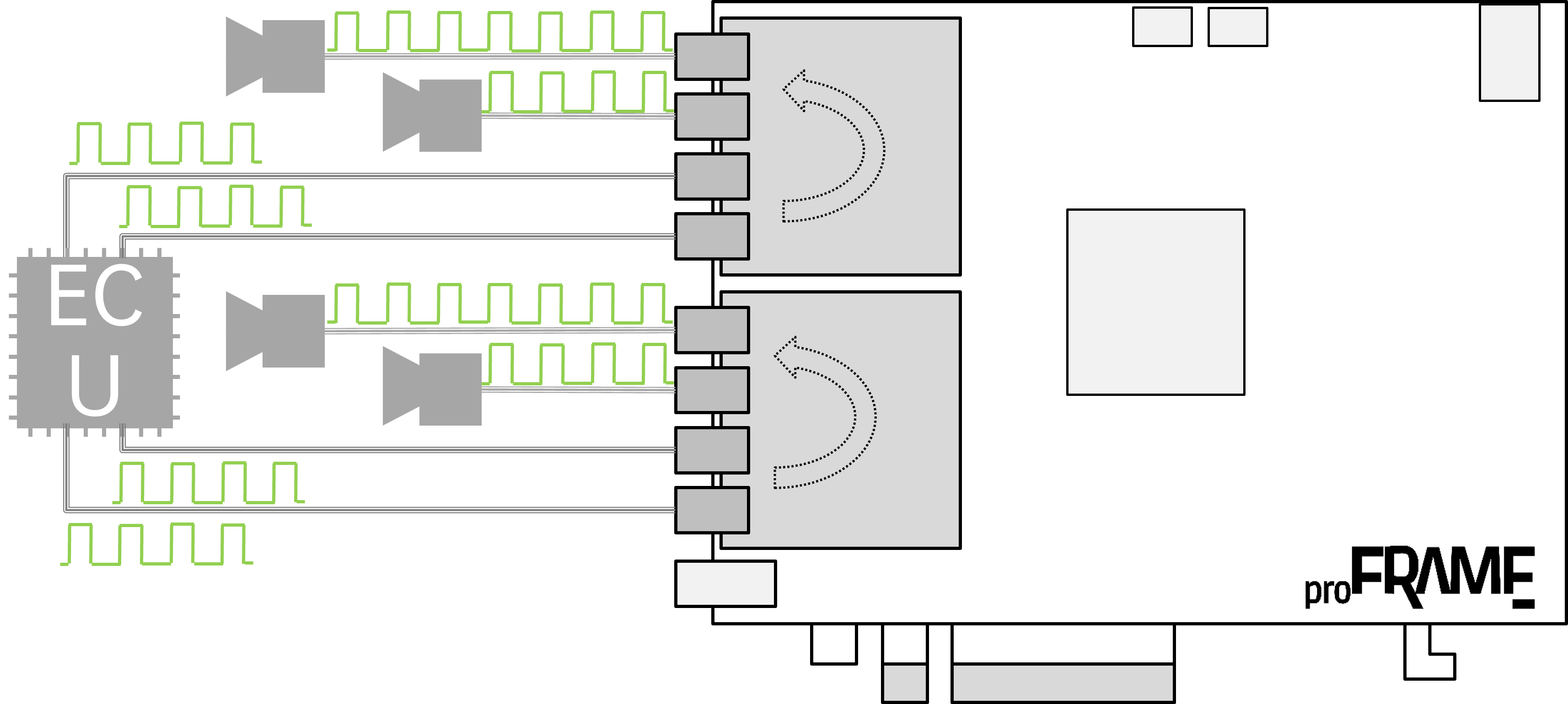 圖6. proFRAME旁通ECU的觸發(fā)信號
圖6. proFRAME旁通ECU的觸發(fā)信號
車載場合對于多傳感器數(shù)據(jù)融合以及時間同步的要求非常高,例如要將2D圖像和激光雷達(dá)的點云圖像進(jìn)行融合、實現(xiàn)對點云數(shù)據(jù)的顏色渲染;或者基于2D圖像識別結(jié)果的box框?qū)c云數(shù)據(jù)進(jìn)行分割,從而獲取目標(biāo)的三維位姿 cube。友思特 proFRAME 板卡提供了4種向相機發(fā)送同步觸發(fā)信號實現(xiàn)相機同步的方式:
板卡內(nèi)部的FPGA生成時鐘信號傳輸至相機;
外部觸發(fā)源通過板卡的外部觸發(fā)信號口傳輸至FPGA再轉(zhuǎn)送至相機;
多proFRAME板卡通過Daisy鏈拓?fù)浣Y(jié)構(gòu)同步;
ECU發(fā)送觸發(fā)信號,經(jīng)由板卡的TAP模式,旁通至相機。
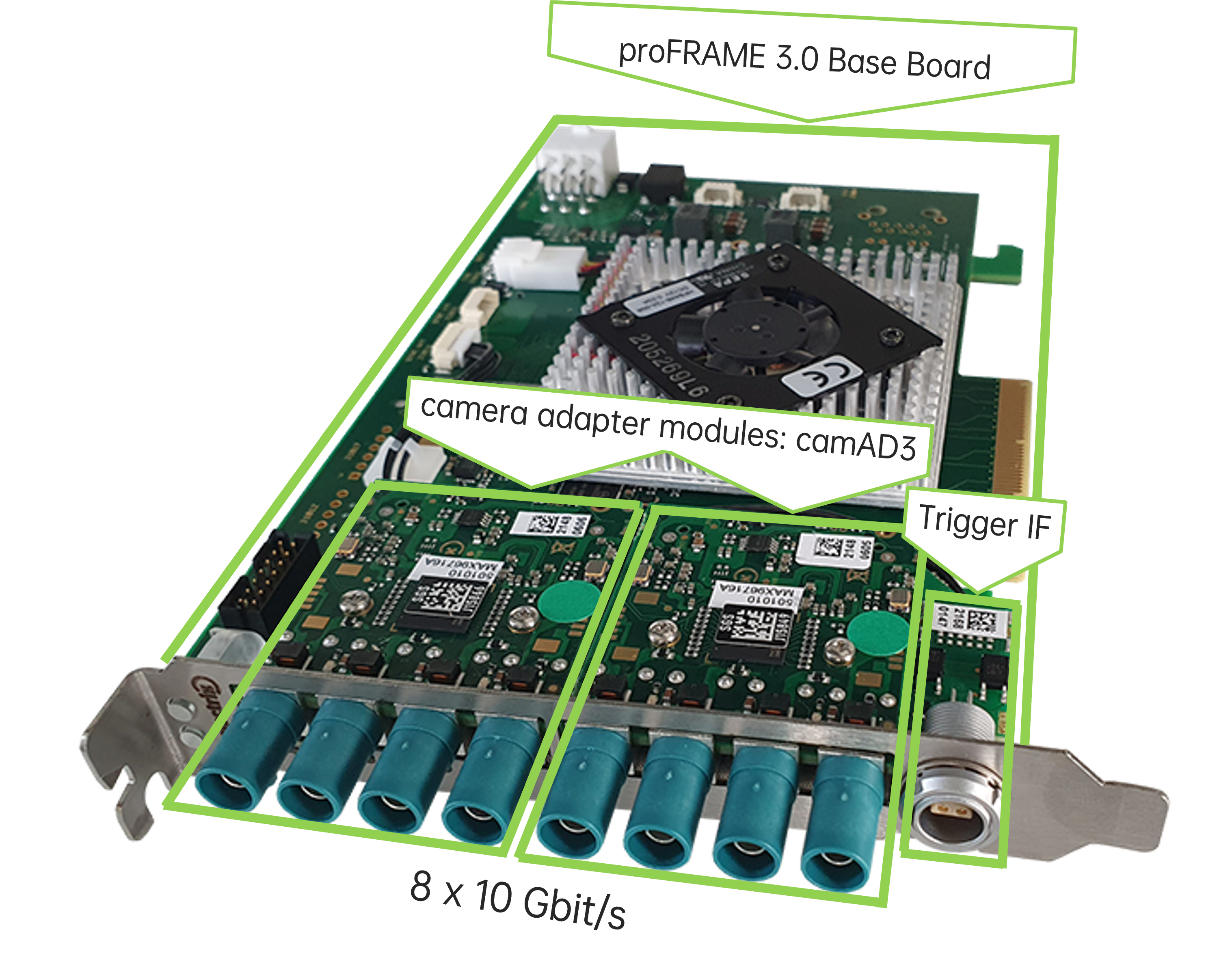 圖7. 友思特proFRAME圖像采集和回放板卡
圖7. 友思特proFRAME圖像采集和回放板卡
友思特 proFRAME 板卡采用模塊化設(shè)計的方式,通過切換不同的相機適配器模塊,適配包括 GMSL 1/2/3、FPD - Link III/IV、GVIF3、CSI-2 多種傳輸協(xié)議的接口相機/視頻流。板卡支持同軸線纜供電和邊帶通信(I2C和GPIO),可同時進(jìn)行多路視頻數(shù)據(jù)的采集和回放(多至8路),且采集數(shù)據(jù)攜帶納秒級別的高精度時間戳,并能夠以時間戳信息精準(zhǔn)同步回放視頻流,通過TAP模式旁路各種數(shù)據(jù),在ADAS、EoL測試和 AD的硬件在環(huán)測試領(lǐng)域都大有建樹。
總結(jié)
車載多相機實時同步采集系統(tǒng)在新能源汽車及智能駕駛領(lǐng)域扮演著至關(guān)重要的角色。系統(tǒng)通過高精度、高速度的圖像數(shù)據(jù)采集,為車輛的環(huán)境感知、行駛狀態(tài)監(jiān)測以及駕駛輔助提供了強有力的技術(shù)支持。
隨著自動駕駛技術(shù)的不斷深入發(fā)展,車載相機系統(tǒng)的要求也日益嚴(yán)苛,不僅需要具備高分辨率、廣視角的成像能力,還必須在各種復(fù)雜環(huán)境下保持穩(wěn)定的性能。面對未來智能駕駛的多元化需求,車載多相機實時同步采集系統(tǒng)將持續(xù)融合新興技術(shù),如深度學(xué)習(xí)、計算機視覺等AI技術(shù),以提升系統(tǒng)的智能化水平。同時,不斷優(yōu)化相機之間的同步性能和圖像處理算法,確保在多變的行車環(huán)境中能夠?qū)崟r、準(zhǔn)確地捕捉關(guān)鍵信息,為車輛的決策系統(tǒng)提供可靠的數(shù)據(jù)基礎(chǔ)。
從長遠(yuǎn)來看,智能駕駛技術(shù)將是未來交通出行的重要發(fā)展方向。車載多相機實時同步采集系統(tǒng)作為智能駕駛的“眼睛”,其技術(shù)創(chuàng)新和性能提升將直接推動智能駕駛的發(fā)展,助力實現(xiàn)更安全、更高效的綠色出行。同時,隨著技術(shù)的不斷進(jìn)步和成本的優(yōu)化,這一系統(tǒng)有望在未來實現(xiàn)更廣泛的商業(yè)應(yīng)用,為智能交通和綠色出行貢獻(xiàn)重要力量。
了解更多?歡迎訪問官網(wǎng),探索豐富案例:https://viewsitec.com/proframe-grabber/
審核編輯 黃宇
-
數(shù)據(jù)采集
+關(guān)注
關(guān)注
40文章
7115瀏覽量
116228 -
相機
+關(guān)注
關(guān)注
4文章
1458瀏覽量
54615
發(fā)布評論請先 登錄
白城LP-SCADA工業(yè)產(chǎn)線高密度數(shù)據(jù)采集 實時響應(yīng)無滯后
高品質(zhì)存儲卡助力精準(zhǔn)數(shù)據(jù)采集

DCS數(shù)據(jù)采集系統(tǒng)有什么功能
數(shù)據(jù)采集系統(tǒng)的典型應(yīng)用
康謀方案 | BEV感知技術(shù):多相機數(shù)據(jù)采集與高精度時間同步方案
可與MES系統(tǒng)集成的數(shù)據(jù)采集監(jiān)控平臺
再創(chuàng)佳績!友思特榮獲“機器人技術(shù)成果創(chuàng)新創(chuàng)業(yè)大賽”三等獎!

友思特方案 精析“蟬翼”:FPGA圖像處理方案助力鋰電池高速產(chǎn)線檢測新升級
友思特新聞 友思特榮獲廣州科技創(chuàng)新創(chuàng)業(yè)大賽智能裝備行業(yè)賽初創(chuàng)組優(yōu)勝企業(yè)!
友思特分享 繪制江河湖海:uEye相機助力水路航道自動3D測繪系統(tǒng)
MES系統(tǒng)如何實現(xiàn)生產(chǎn)車間的實時監(jiān)控、精準(zhǔn)調(diào)度
友思特動態(tài) 友思特伙伴Spectrolight可調(diào)諧激光源TLS榮獲2024年LFW創(chuàng)新者金獎!

友思特方案 多相機的完美閉環(huán):proFRAME車載全景環(huán)視相機數(shù)采方案

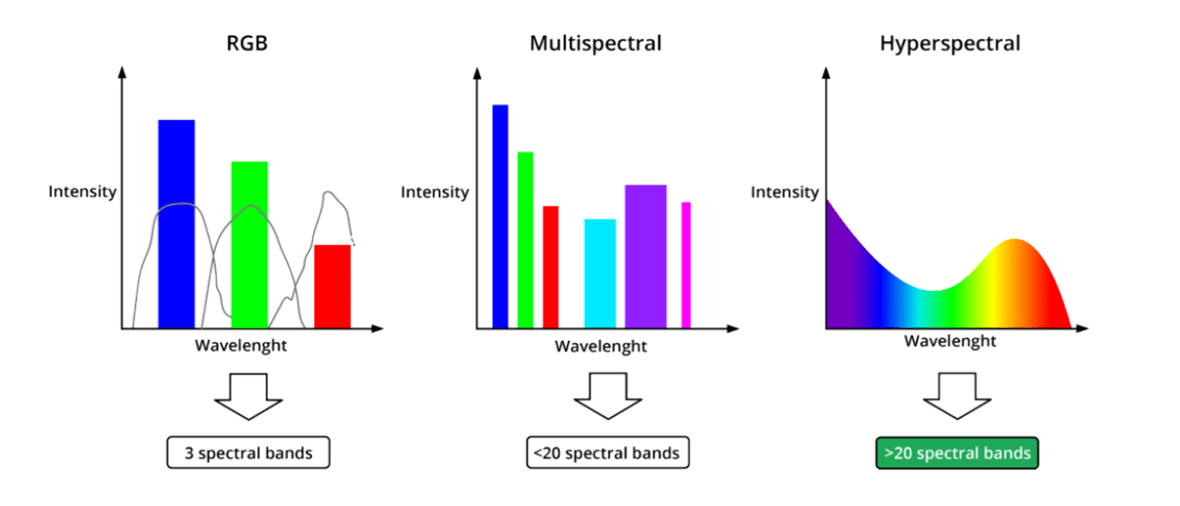
友思特新品 多光譜與高光譜相機:基于隨心而定的可調(diào)諧濾光片技術(shù)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論