") Made with KiCad(100):RM2024 超級(jí)電容控制器
Made with KiCad(100):RM2024 超級(jí)電容控制器

“香港科技大學(xué) ENTERPRIZE 戰(zhàn)隊(duì)在 Robomaster 2024 中超級(jí)電容控制器的技術(shù)方案,硬件軟件完全開(kāi)源。感覺(jué)又回到了熱血沸騰的大學(xué)時(shí)代!”
Made with KiCad 系列將支持新的展示方式。直接將以下鏈接復(fù)制到瀏覽器中(或點(diǎn)擊“閱讀原文”查看):
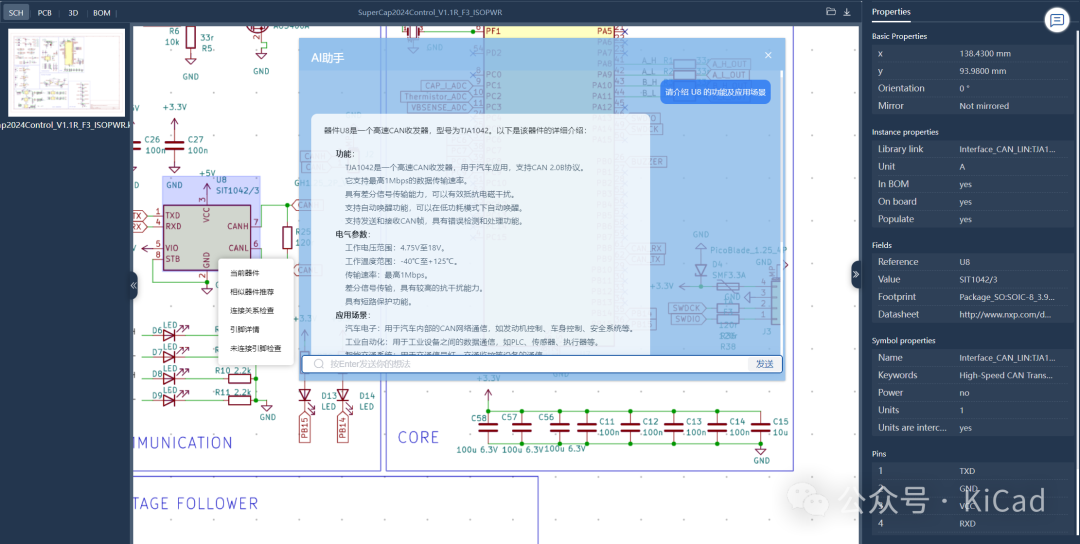
https://www.eda.cn/ecadViewer/viewerPage/?xmlId=710119fc-7fe0-4464-aba9-bcd920a25e89&fileZip=%2Fdata%2Fdesign%2Fdemo%2F710119fc-7fe0-4464-aba9-bcd920a25e89.zip 即可動(dòng)態(tài)查看設(shè)計(jì)的原理圖、PCB、3D 及 BOM,查詢(xún)?cè)O(shè)計(jì)中器件、走線、焊盤(pán)的屬性詳情。還可以在原理圖中與AI小助手互動(dòng),幫您更高效地學(xué)習(xí)設(shè)計(jì)細(xì)節(jié):
繼承 RM2023 開(kāi)源 RM2024超級(jí)電容設(shè)計(jì)總體繼承了 ENTERPRIZE 在 RM2023 的超級(jí)電容方案開(kāi)源,選用了相同的硬件拓?fù)渑c軟件架構(gòu)。
可以通過(guò)鏈接訪問(wèn)RM2023超級(jí)電容開(kāi)源:
https://github.com/hkustenterprize/RM2023-SuperCapacitor
相較RM2023開(kāi)源的項(xiàng)目,本項(xiàng)目最大的特點(diǎn)便是體積縮小了非常多,且功率得到了提升。
方案概覽
靈感源自2021賽季大連理工大學(xué)凌BUG戰(zhàn)隊(duì)的開(kāi)源,電路方案如下:
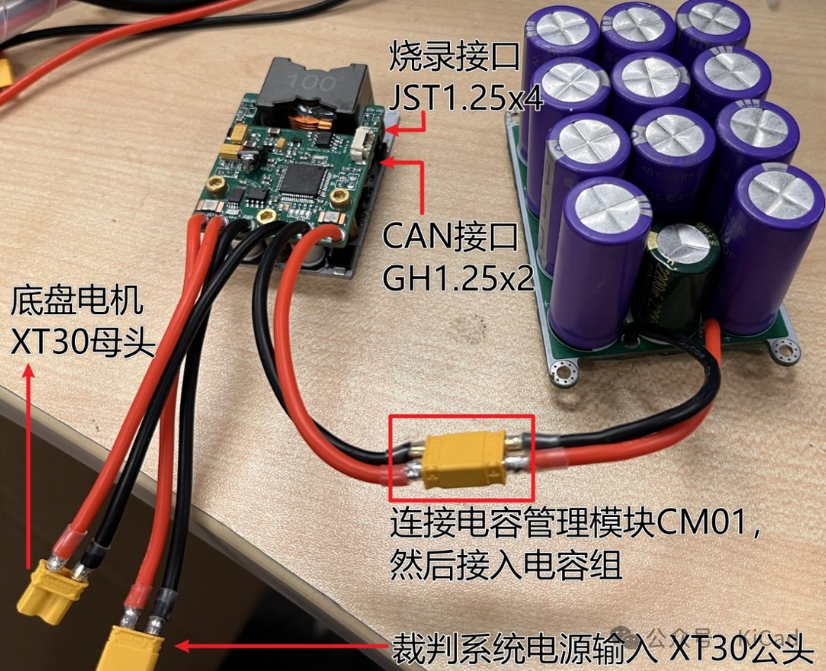
電源‖底盤(pán)電機(jī)?雙向可控功率模塊?超級(jí)電容
底盤(pán)電機(jī)直接連接到電源,超級(jí)電容和一個(gè)雙向可控功率模塊共同構(gòu)成一個(gè)可控的功率補(bǔ)償系統(tǒng),憑借高速的功率閉環(huán)控制動(dòng)態(tài)對(duì)底盤(pán)功率進(jìn)行削峰填谷,從而實(shí)現(xiàn)超級(jí)電容的能量緩沖。
為便于理解,在此舉例。
假設(shè)底盤(pán)功率限制為60W,電池電壓為20V,超級(jí)電容處于半充滿(mǎn)狀態(tài)。
若此時(shí)底盤(pán)電機(jī)電流為2A,即底盤(pán)電機(jī)功率為40W,則雙向可控功率模塊將使用1A電流對(duì)超級(jí)電容充電,即充電功率為20W。將多余功率緩存在超級(jí)電容中。
若此時(shí)底盤(pán)電機(jī)電流為5A,即底盤(pán)電機(jī)功率為100W,則雙向可控功率模塊將使用2A電流對(duì)超級(jí)電容進(jìn)行放電,此時(shí)放電功率為40W。利用超級(jí)電容中的能量補(bǔ)償?shù)妆P(pán)功率。
若此時(shí)底盤(pán)電機(jī)電流為-2A,即底盤(pán)電機(jī)功率為-40W,則雙向可控功率模塊將使用5A電流對(duì)超級(jí)電容進(jìn)行充電,此時(shí)充電功率為100W。即動(dòng)能回收的過(guò)程。 該方案具有如下幾個(gè)主要優(yōu)點(diǎn):
并聯(lián)接入底盤(pán)電機(jī)母線,即使系統(tǒng)工作異常,只需要及時(shí)切斷電路(關(guān)斷MOS管/保險(xiǎn)絲熔斷等),底盤(pán)仍可繼續(xù)正常工作。
無(wú)論電容剩余能量如何,底盤(pán)電機(jī)的母線電壓都能保持相對(duì)穩(wěn)定,約等于電源電壓,能夠給電機(jī)提供良好的工作環(huán)境。
可以主動(dòng)限制動(dòng)能回收的電流,允許部分浪涌電流倒灌回電池,防止損壞超級(jí)電容組。
通過(guò)簡(jiǎn)單的代碼邏輯,可在底盤(pán)電源切斷時(shí)立即關(guān)斷系統(tǒng)輸出,在機(jī)器人陣亡后保存電容能量,同時(shí)避免違反規(guī)則。
該方案的顯著缺點(diǎn)如下:
采用數(shù)控方案,對(duì)嵌入式程序設(shè)計(jì),控制系統(tǒng)設(shè)計(jì)要求較高,稍有不慎即可能損傷硬件。(我們調(diào)試時(shí)曾不慎將輸出電壓升至100V以上)
采用并聯(lián)方式被動(dòng)補(bǔ)償功率,若底盤(pán)電控不加以合理限制,仍有超功率風(fēng)險(xiǎn)。
電學(xué)原理 升壓與降壓 首先回顧經(jīng)典的升壓電路與降壓電路。為方便理解,假設(shè)此處所有DC-DC電路均工作在CCM(連續(xù)導(dǎo)通)模式下,MOSFET(場(chǎng)效應(yīng)管)為理想MOSFET,忽略死區(qū)時(shí)間,RDSon等。
Buck降壓。下圖左側(cè)為非同步Buck電路,肖特基二極管起到為電感續(xù)流的作用。右側(cè)為同步Buck電路,用MOSFET替代了二極管,帶來(lái)了更低的壓降與更靈活的控制。同步Buck電路中,CCM模式下,MOSFET經(jīng)過(guò)控制,能夠在電流正向的時(shí)候?qū)ā⒎聪虻臅r(shí)候斷開(kāi),實(shí)現(xiàn)了二極管的功能。
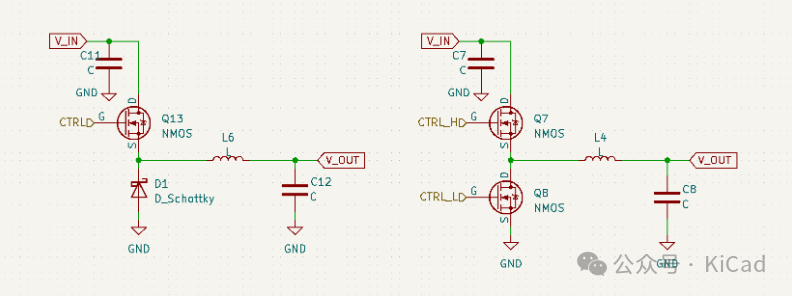
通過(guò)伏秒平衡定律可推導(dǎo)Buck電路在CCM模式下的輸入輸出電壓關(guān)系VoutVin=D,其中Vout為輸出電壓,Vin為輸入電壓,D為上管導(dǎo)通時(shí)間占整個(gè)PWM周期的占空比。
Boost升壓。下圖左側(cè)為非同步Boost電路,MOSFET對(duì)地導(dǎo)通時(shí)為電感充能,二極管在此處起到續(xù)流和防倒灌作用。右側(cè)為同步Boost電路。用MOSFET替代二極管,在適當(dāng)?shù)目刂葡聦?shí)現(xiàn)了二極管的功能。
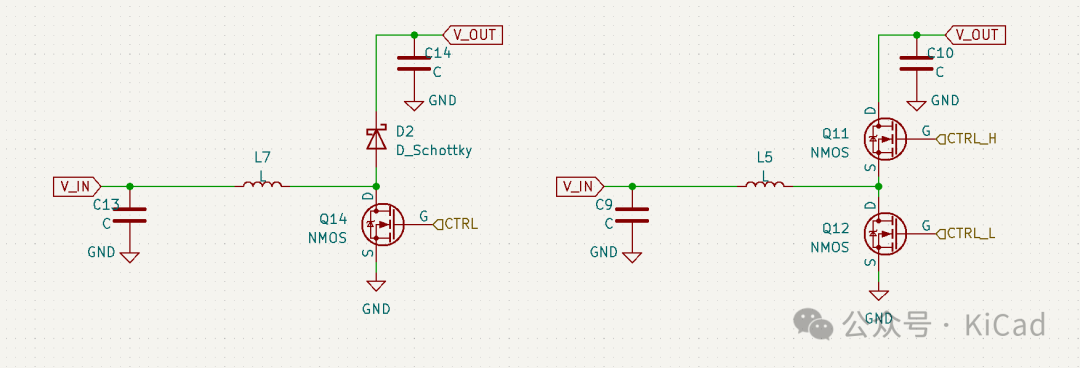
通過(guò)伏秒平衡定律可推導(dǎo)Boost電路在CCM模式下的輸入輸出電壓關(guān)系VoutVin=1D,其中Vout為輸出電壓,Vin為輸入電壓,D為上管導(dǎo)通時(shí)間占整個(gè)PWM周期的占空比(注意是上管)。
雙向升降壓
同樣的,假設(shè)一切條件全部理想,將Buck電路的前半段與Boost電路的后半段相連,我們可得到如下的四開(kāi)關(guān)雙向Buck-Boost電路。觀察可見(jiàn),此電路為對(duì)稱(chēng)結(jié)構(gòu)。
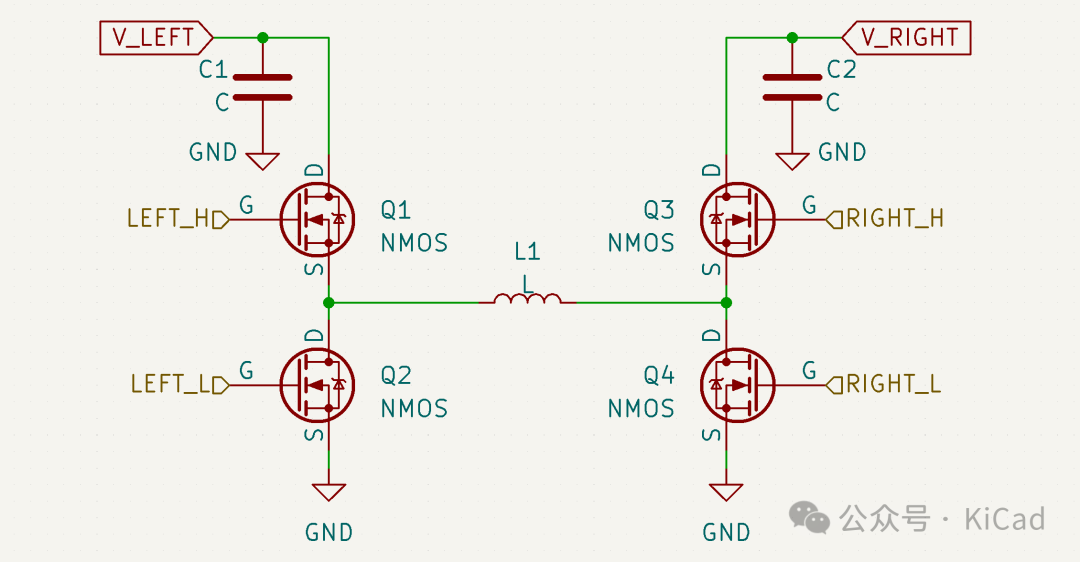
假設(shè)電流從左往右流動(dòng)
若將RIGHT_H常導(dǎo)通,RIGHT_L常斷開(kāi),而LEFT_H和LEFT_L繼續(xù)使用如上的Buck電路控制策略,則等效電路圖如下圖。這就是完全等效于Buck的拓?fù)洌藭r(shí)可將電路看作同步Buck,可實(shí)現(xiàn)將左側(cè)電降壓后提供給右側(cè)。
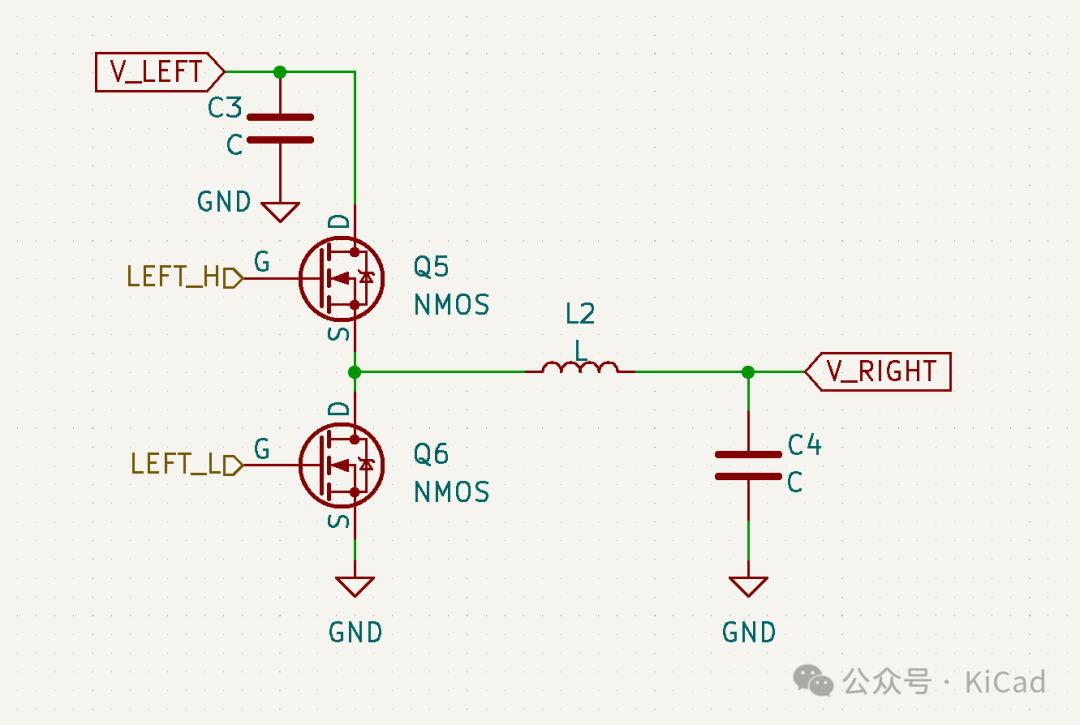
若將LEFT_H常導(dǎo)通,LEFT_L常斷開(kāi),而RIGHT_H和RIGHT_L繼續(xù)使用如上的Boost電路控制策略,則等效電路如下圖。這就是Boost的拓?fù)洌藭r(shí)將電路看作同步Boost即可實(shí)現(xiàn)將左側(cè)電升壓后提供給右側(cè)。
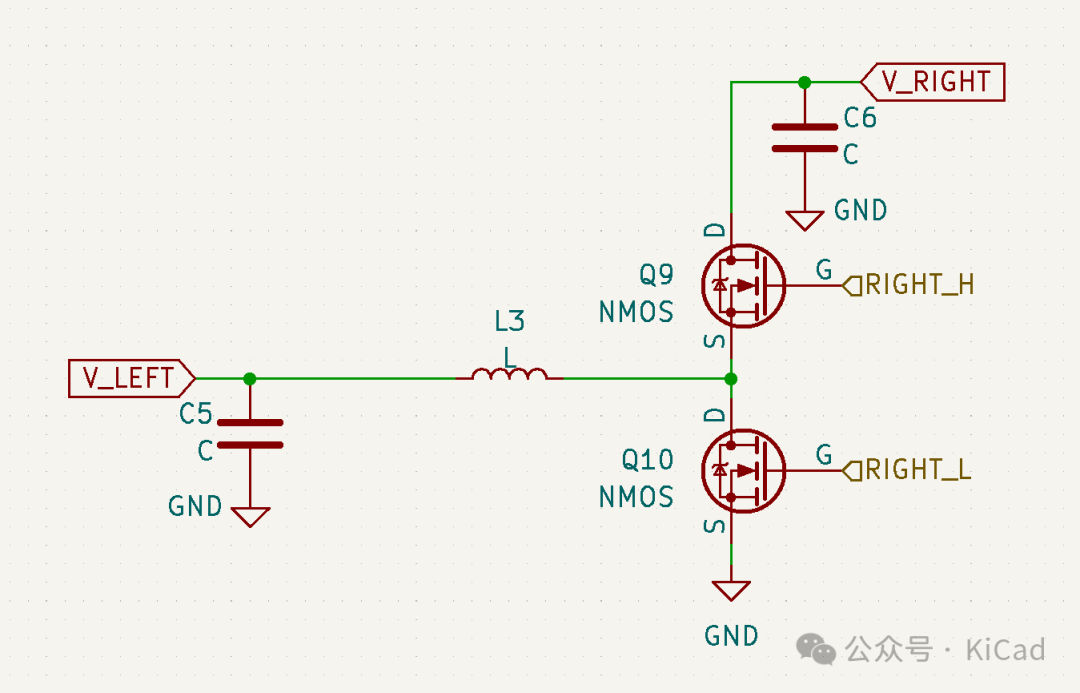
第三種情況是需要的左電壓與右電壓相近。此時(shí)實(shí)際應(yīng)用中由于最大占空比以及死區(qū)時(shí)間等限制,很難單獨(dú)使用Buck或者Boost拓?fù)渖伤桦妷罕取S谑强紤]用Buck控制策略控制左半橋,用Boost控制策略控制右半橋,此即為buck-boost電路。在任意時(shí)刻(瞬時(shí)),電路可視為Buck電路或Boost電路。(此處省略了一些細(xì)節(jié),如為了防止兩邊的下管同時(shí)導(dǎo)通,左右兩邊的上管占空比應(yīng)相互制約,同時(shí)相位也應(yīng)錯(cuò)開(kāi))此時(shí),無(wú)論是使用疊加原理還是通過(guò)伏秒平衡定律,我們都可以得到如下結(jié)果VleftVright=DrightDleft,其中,Dleft為左側(cè)上管占空比,Dright為右側(cè)上管占空比。
假設(shè)電流從右往左流動(dòng)
由于電路完全對(duì)稱(chēng),顯然,僅需將Buck與Boost顛倒過(guò)來(lái),即可實(shí)現(xiàn)與上述完全相同的效果,在此不做過(guò)多贅述。
經(jīng)過(guò)同樣的推導(dǎo),我們?nèi)匀坏玫酱私Y(jié)果VleftVright=DrightDleft。
總結(jié)
在控制這個(gè)四開(kāi)關(guān)雙向Buck-Boost電路時(shí),實(shí)際上不需要區(qū)分電路到底是Buck還是Boost,也不需要關(guān)注電流的流向等,只需給予兩個(gè)半橋合適的占空比,即可獲得想要的左右電壓之比。
這種不對(duì)電流流向做限制,強(qiáng)制上下管交替導(dǎo)通的控制方式被稱(chēng)為FPWM(強(qiáng)制脈寬調(diào)制)模式。由于實(shí)現(xiàn)此控制模式的硬件較為簡(jiǎn)單,本設(shè)計(jì)采用此控制模式進(jìn)行控制。
注意:Buck與Boost的互相轉(zhuǎn)換只在同步Buck/同步Boost中起作用。
硬件設(shè)計(jì)
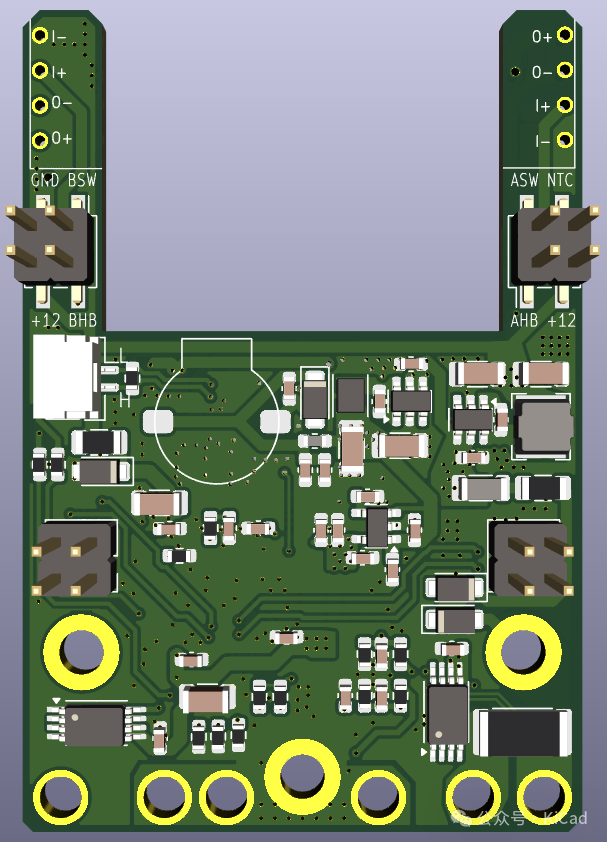
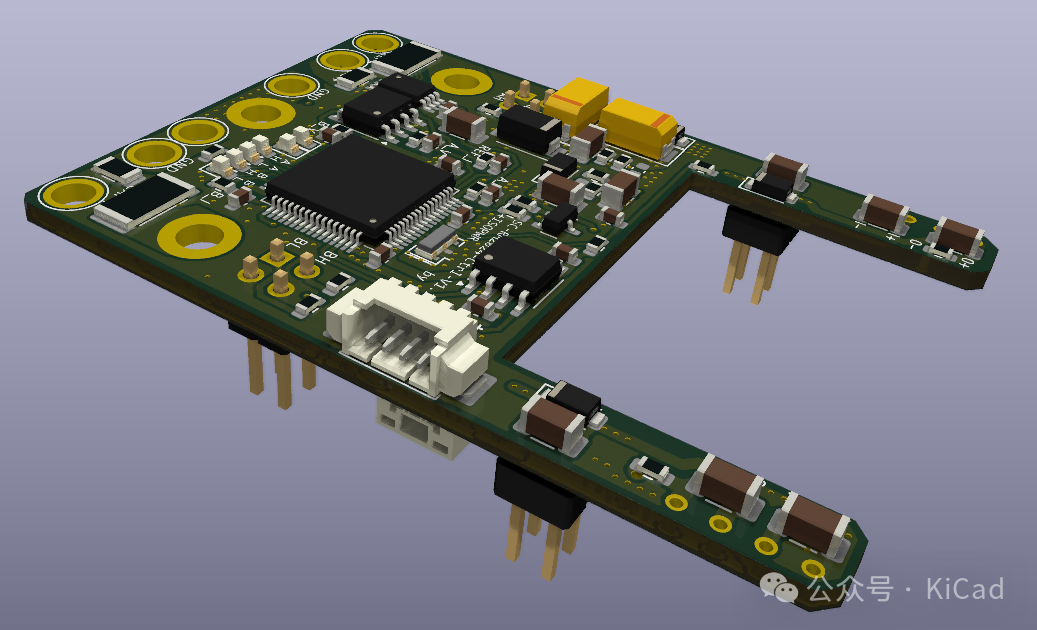
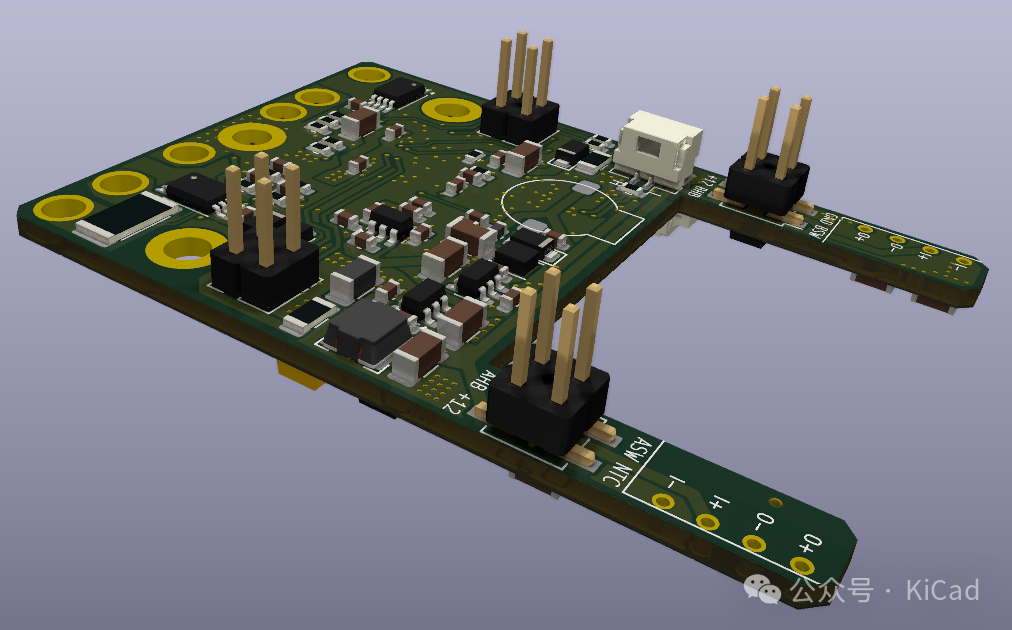
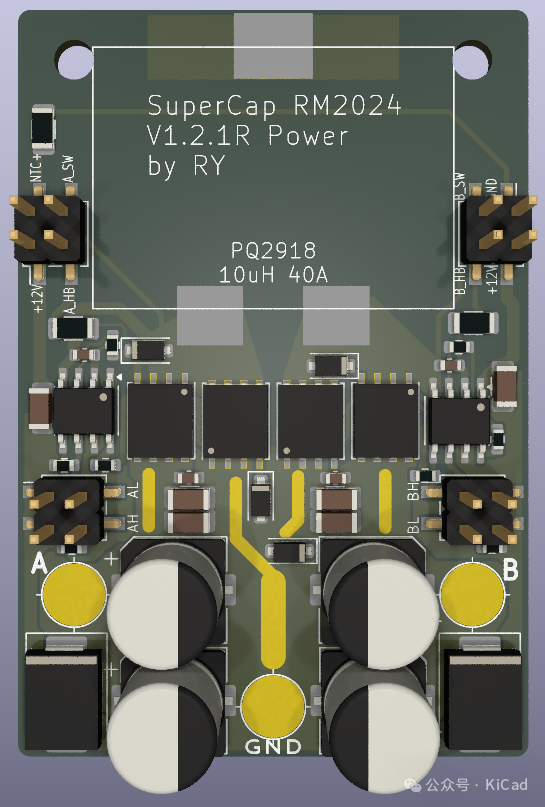
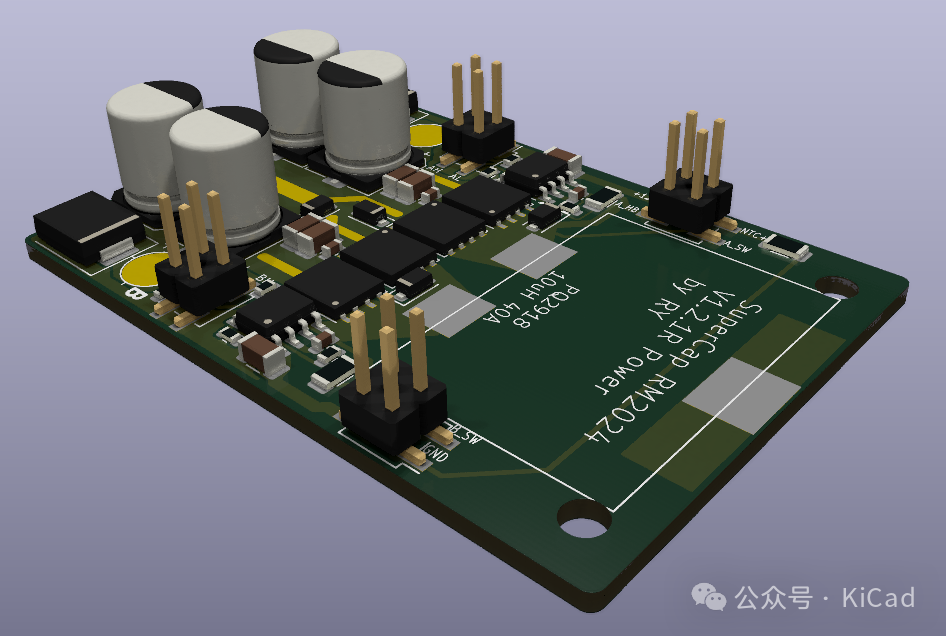
外觀
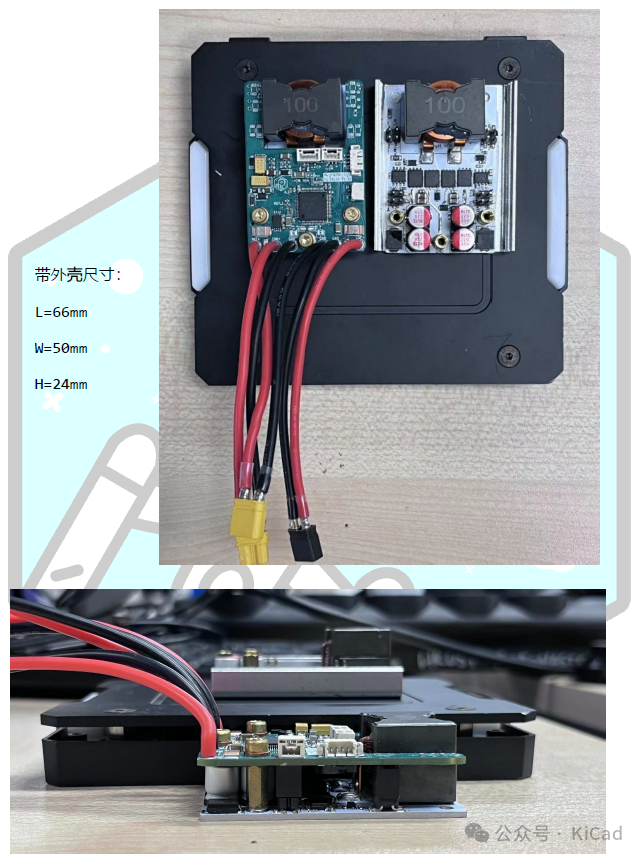
功率板(下板)設(shè)計(jì)要點(diǎn)
下板即是功率板 Power Board ,材質(zhì)為鋁基板。帶有MOSFET、驅(qū)動(dòng)電路、扁線功率電感、固態(tài)電容等。利用鋁基板加強(qiáng)散熱,使得超級(jí)電容控制模塊可以持續(xù)輸出20A以上大電流而保持不過(guò)熱。
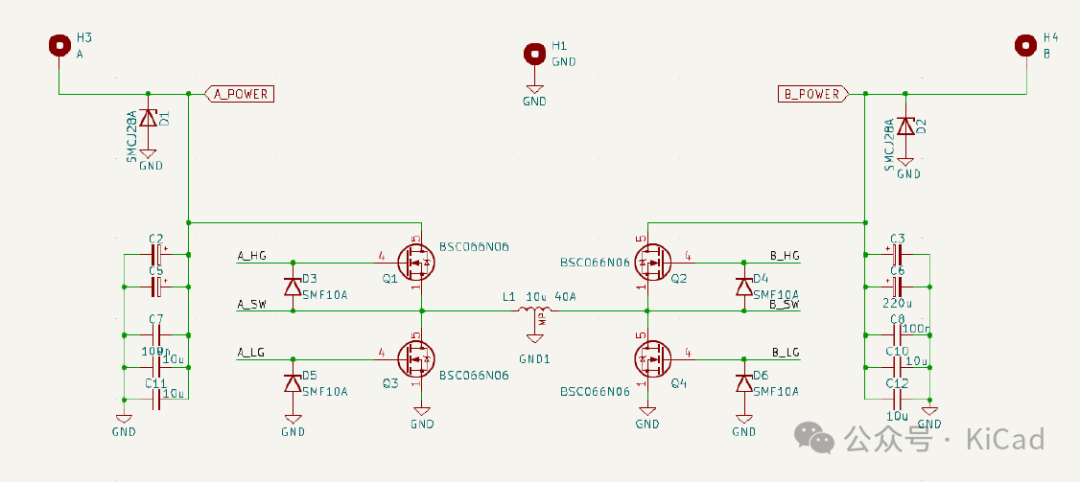
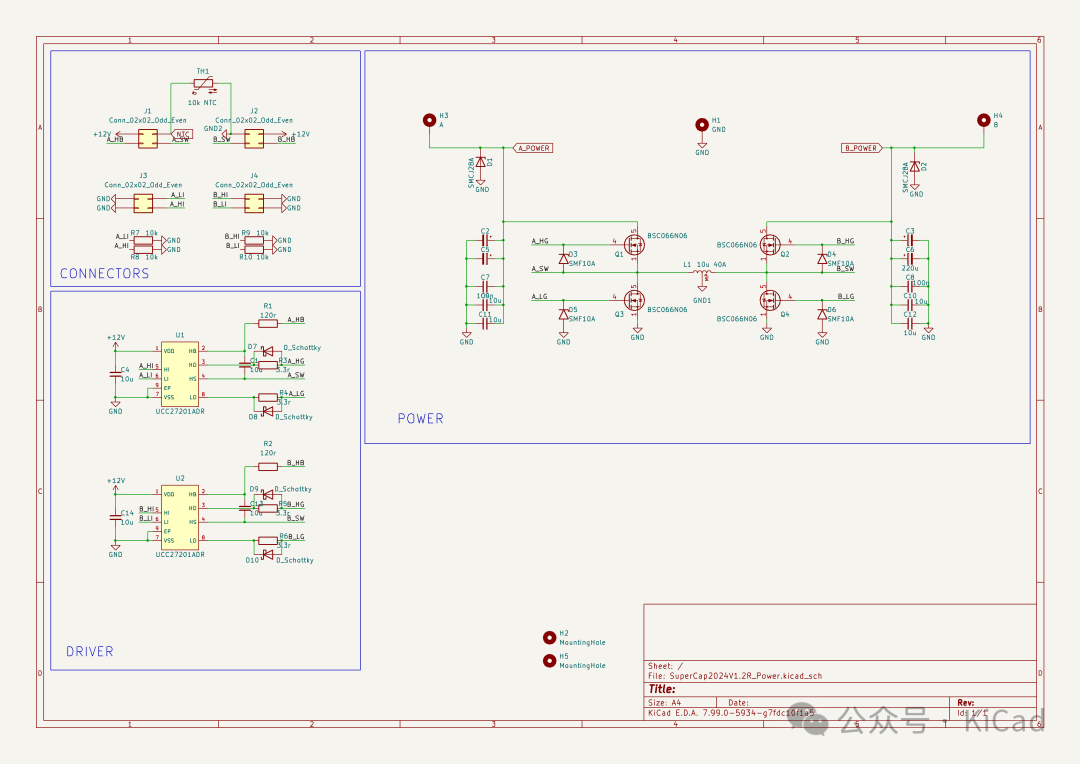
主功率回路
主功率回路是四個(gè)MOS組成的 Buck-Boos t電路,可以雙向電流升降壓。 使用SMF10A TVS來(lái)保護(hù)MOS的柵極受到可能的靜電或振蕩導(dǎo)致的擊穿。SMF10A的熔斷電壓為20V,不超過(guò)BSC066N06的Vgs上限。
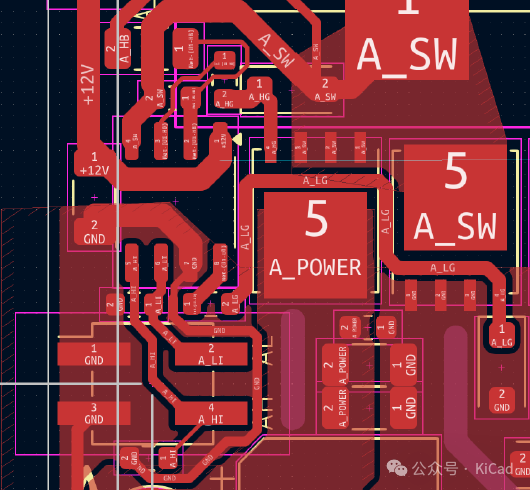
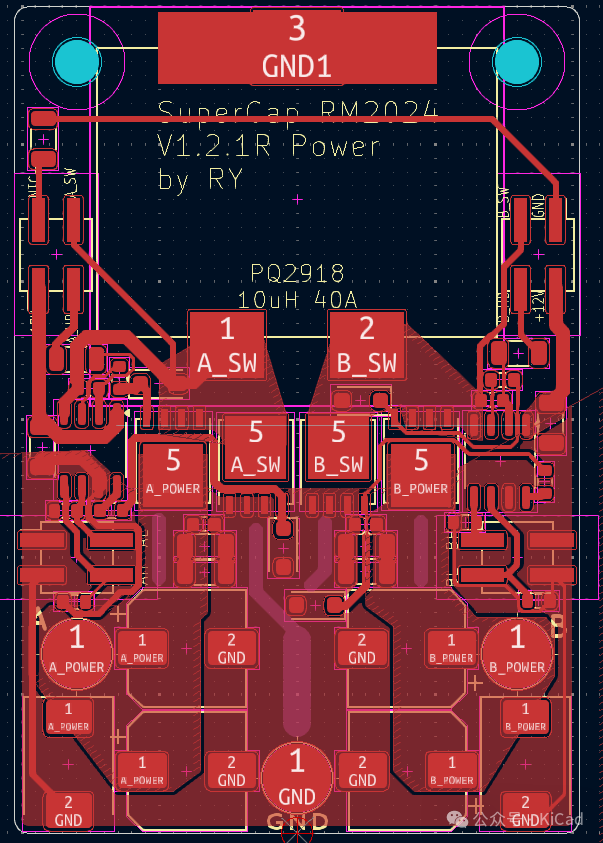
Layout方面,采用了對(duì)稱(chēng)的U形設(shè)計(jì),并且能夠確保:
a) 高dI/dt回路可以盡可能小(如圖,半橋的VPP和GND幾乎貼在一起了)。近處使用100nF 0603的MLCC電容減小寄生電感對(duì)高頻噪聲的阻礙,遠(yuǎn)處再并聯(lián)10uF 1206的MLCC提供較低頻率噪聲需要的電容值。這樣可以最小化開(kāi)關(guān)導(dǎo)致的EMI問(wèn)題。 b) SW面積盡可能小,減小耦合噪聲 c) 并聯(lián)了貼片固態(tài)電容,能夠在比較高的電壓下接替MLCC來(lái)保持足夠的濾波容值。且固態(tài)電容雖然成本較高,但是性能優(yōu)越,不易燒毀、內(nèi)阻很小。 d) 大電流部分開(kāi)窗上錫 至于SW節(jié)點(diǎn)的振蕩,經(jīng)測(cè)試正常開(kāi)關(guān)的情況下振蕩不大,不會(huì)影響其他部分。且用RC Snubber嘗試之后發(fā)現(xiàn)并不能顯著地優(yōu)化振蕩,因此取消了RC阻尼電路。
二極管 同時(shí),也有嘗試過(guò)在四個(gè)MOS上各并聯(lián)肖特基二極管。為了面積考慮,使用SR1060L直插二極管直接搭棚并聯(lián)于MOS上方。經(jīng)過(guò)測(cè)試,能夠比較顯著地提升在輕載(大約1A電流下)的效率:從97%提升至97.3%。而重載下則沒(méi)那么顯著。 探究波形后發(fā)現(xiàn),肖特基二極管的并聯(lián)可以在死區(qū)較大的情況下讓電流不經(jīng)過(guò)MOS的體二極管而經(jīng)過(guò)壓降更小的肖特基二極管,因此提高效率。然而在重載下,一方面MOS的關(guān)斷、開(kāi)啟波形變得更加陡峭,體現(xiàn)為死區(qū)更小;并且大電流下肖特基二極管的功耗損失也大。因此呈現(xiàn)如上結(jié)論。
最終綜合表現(xiàn)與PCB面積、加工難度等,選擇了不并聯(lián)二極管。
MOS驅(qū)動(dòng)電路
MOS的驅(qū)動(dòng)也是很重要的一環(huán)。

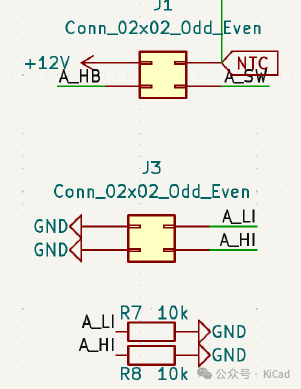 選用TI的UCC272x1系列芯片,能夠提供較高的驅(qū)動(dòng)電流且能夠用自舉電容來(lái)打開(kāi)半橋上管。原理圖比較簡(jiǎn)潔,理論上不需要額外的電路。 同時(shí),為了滿(mǎn)足“100%常開(kāi)上管”的需求(為了提升單獨(dú)Buck/單獨(dú)Boost時(shí)的效率),將驅(qū)動(dòng)芯片的HB網(wǎng)絡(luò)與開(kāi)關(guān)電路的SW引腳引出。用排針連接到上板,在上板上接入隔離12V DC-DC模塊,實(shí)現(xiàn)能夠提供持續(xù)的電壓差用來(lái)打開(kāi)上管MOS。隔離驅(qū)動(dòng)需要的電流很小,因此接入一個(gè)電阻用來(lái)限流、防止靜電等。 MOS驅(qū)動(dòng)芯片為MOS的柵極充放電,在高速的應(yīng)用下電流很大、需要極小的寄生電感。因此這版功率電路的設(shè)計(jì)中將MOS驅(qū)動(dòng)芯片也放置在了下板上,非常靠近MOS。
選用TI的UCC272x1系列芯片,能夠提供較高的驅(qū)動(dòng)電流且能夠用自舉電容來(lái)打開(kāi)半橋上管。原理圖比較簡(jiǎn)潔,理論上不需要額外的電路。 同時(shí),為了滿(mǎn)足“100%常開(kāi)上管”的需求(為了提升單獨(dú)Buck/單獨(dú)Boost時(shí)的效率),將驅(qū)動(dòng)芯片的HB網(wǎng)絡(luò)與開(kāi)關(guān)電路的SW引腳引出。用排針連接到上板,在上板上接入隔離12V DC-DC模塊,實(shí)現(xiàn)能夠提供持續(xù)的電壓差用來(lái)打開(kāi)上管MOS。隔離驅(qū)動(dòng)需要的電流很小,因此接入一個(gè)電阻用來(lái)限流、防止靜電等。 MOS驅(qū)動(dòng)芯片為MOS的柵極充放電,在高速的應(yīng)用下電流很大、需要極小的寄生電感。因此這版功率電路的設(shè)計(jì)中將MOS驅(qū)動(dòng)芯片也放置在了下板上,非常靠近MOS。
雖然鋁基板上的Layout比較困難,有些回路很難做到完美,但是總體帶來(lái)的收益是較大的。
一側(cè)的MOS驅(qū)動(dòng)電路 Layout方面優(yōu)先將BootStrap電容與芯片盡可能靠近。而后讓柵極到芯片的連線盡可能短(相對(duì)來(lái)說(shuō)線路粗細(xì)反而關(guān)系不大)以減小振蕩。
采用1206的10uF 50V去耦電容,因?yàn)閾?dān)心0603封裝的電容的寄生內(nèi)阻太大、或受到DC偏置影響較大,導(dǎo)致芯片瞬間進(jìn)入低壓保護(hù)而出錯(cuò)。
控制板(上板)設(shè)計(jì)要點(diǎn)
上板即是 Control Board ,材質(zhì)為FR4四層板,負(fù)責(zé)控制,帶有MCU、信號(hào)調(diào)理電路、電流感應(yīng)放大器電路、CAN通信電路,以及相應(yīng)的輔助供電電路等。
供電
24V轉(zhuǎn)10V與5V采用RY8411作為供電芯片。RY8411為同步Buck,在42V耐壓下能夠提供最大1A的電流,效率較高,足夠我們的使用場(chǎng)景。 Pin2Pin的Buck芯片有很多,例如JW5026。經(jīng)過(guò)測(cè)試,對(duì)于比較惡劣的輸入電壓環(huán)境(典型如熱插拔高壓供電線),RY8411能夠承受更高的電壓尖峰而不燒毀。 RY8411有輕載PSM模式,理論上紋波的表現(xiàn)相較于FPWM模式會(huì)差一些。然而一方面電路設(shè)計(jì)中使用了足夠多、足夠大的電容來(lái)濾波,且STM32F334在運(yùn)行中的電流能夠使其進(jìn)入CCM模式中,因此實(shí)際測(cè)試中紋波表現(xiàn)并不差,5V供電紋波大約為110mV,12V供電大約為88mV。
為了應(yīng)對(duì)功率電路可能出現(xiàn)的EMI干擾、以及插拔導(dǎo)致的電壓尖峰,在A側(cè)與B側(cè)進(jìn)入控制板后又經(jīng)過(guò)了一次磁珠濾波。
電流路徑
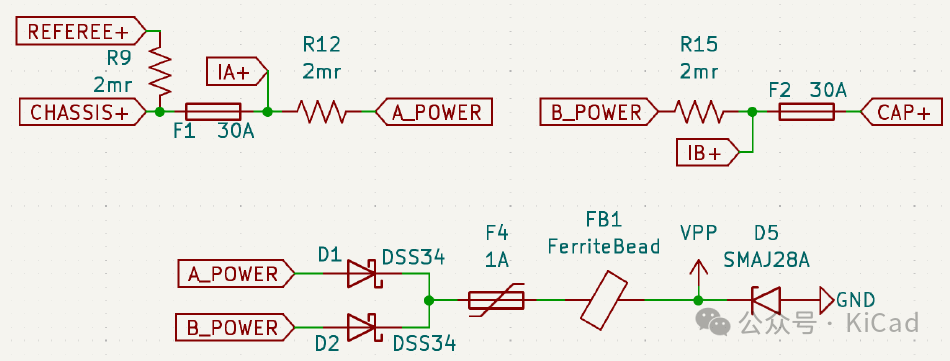
電流采樣與保險(xiǎn)絲均位于上板。采樣分別有:
a) 自裁判系統(tǒng)電源管理模塊輸出->其他所有設(shè)備,稱(chēng)為IReferee
b) DCDC變換器A側(cè)輸入/輸出電流,稱(chēng)為IA
c) DCDC變換器B側(cè)輸入/輸出電流,稱(chēng)為IB,同時(shí)也是給電容組充電的電流
有了這三路采樣便足夠?qū)崿F(xiàn)我們需要的功能。 保險(xiǎn)絲則分別設(shè)立于A與B側(cè)輸入/輸出,特點(diǎn)是即使超級(jí)電容控制模塊完全失效、保險(xiǎn)絲斷開(kāi),底盤(pán)依舊可以接收來(lái)自裁判系統(tǒng)電源的輸入。確保了比賽中極端情況下機(jī)器人的基礎(chǔ)功能可用性。
TVS保護(hù)控制模塊的輸入電容與輸入DCDC芯片,避免過(guò)壓擊穿。
電流采樣放大器
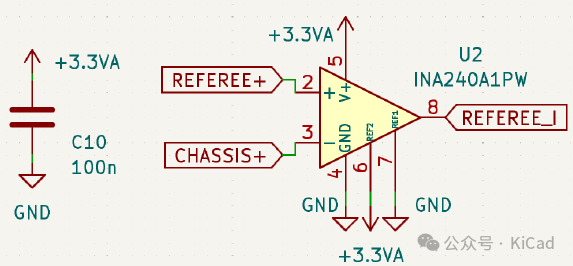
去年的設(shè)計(jì)中使用了INA186。其原因主要是當(dāng)時(shí)難以買(mǎi)到INA240(2022/23年,INA186價(jià)格大約為3元/片,INA240則有可能達(dá)到幾十元/片),從成本考慮上選擇了INA186。
今年則不一樣,一方面INA240變得比INA186還便宜,同時(shí)INA240出色的PWM抑制功能相較INA186優(yōu)勢(shì)非常顯著。且不需要Bias電源(因?yàn)镮NA240內(nèi)置分壓電阻,簡(jiǎn)單連接即可得到1.65V電壓源)的特性大幅簡(jiǎn)化了設(shè)計(jì)。 細(xì)節(jié)上,選擇了最低增益倍數(shù)的版本INA240A1,不僅因?yàn)樗膬r(jià)格一般最低,且低增益的放大器一般具有更高的帶寬。修改了采樣電阻為2mR,這樣在3.3V的電源軌當(dāng)中能夠?qū)崿F(xiàn) ±40A 的電流量程。考慮到機(jī)器人底盤(pán)的瞬間爆發(fā),這個(gè)大小之下的控制是有意義的。
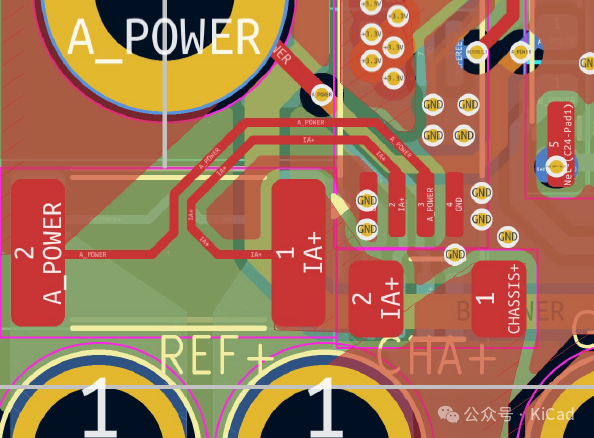
Layout方面,需要注意采樣電阻的開(kāi)爾文接法,即ISense+與ISense-兩路信號(hào)不能與其他信號(hào)共用PCB路徑。且兩路信號(hào)的線路形成的面積盡可能小,為了防止可能的電磁干擾。
RC濾波器 即為標(biāo)準(zhǔn)的RC低通濾波器。 一方面,需要將外部信號(hào)高于采樣頻率的部分去除,避免信號(hào)混疊; 另一方面,使用電容來(lái)滿(mǎn)足STM32的SAR-ADC外設(shè)對(duì)外部信號(hào)的瞬時(shí)電流需求,避免因此導(dǎo)致的失真。(可見(jiàn)4.3.2章節(jié))
選用了33R 100nF的組合,截止頻率大約為48kHz,小于采樣頻率288kHz的一半。
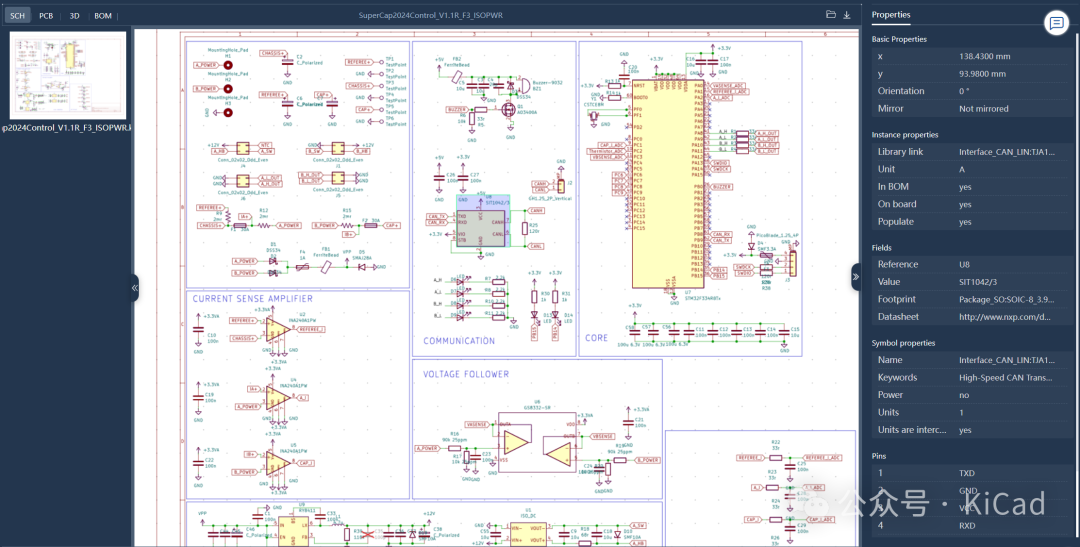
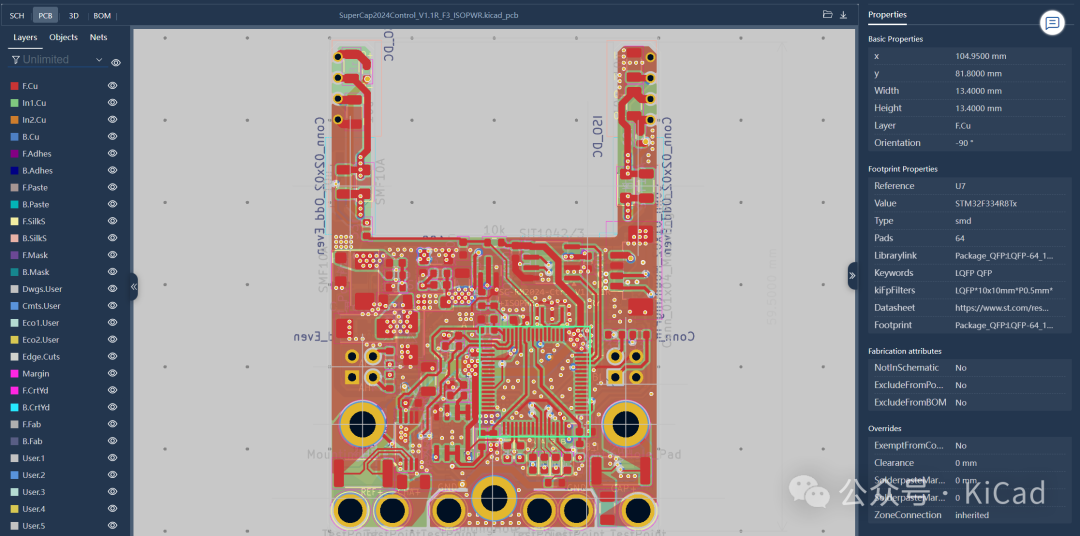
原理圖 & PCB
控制板
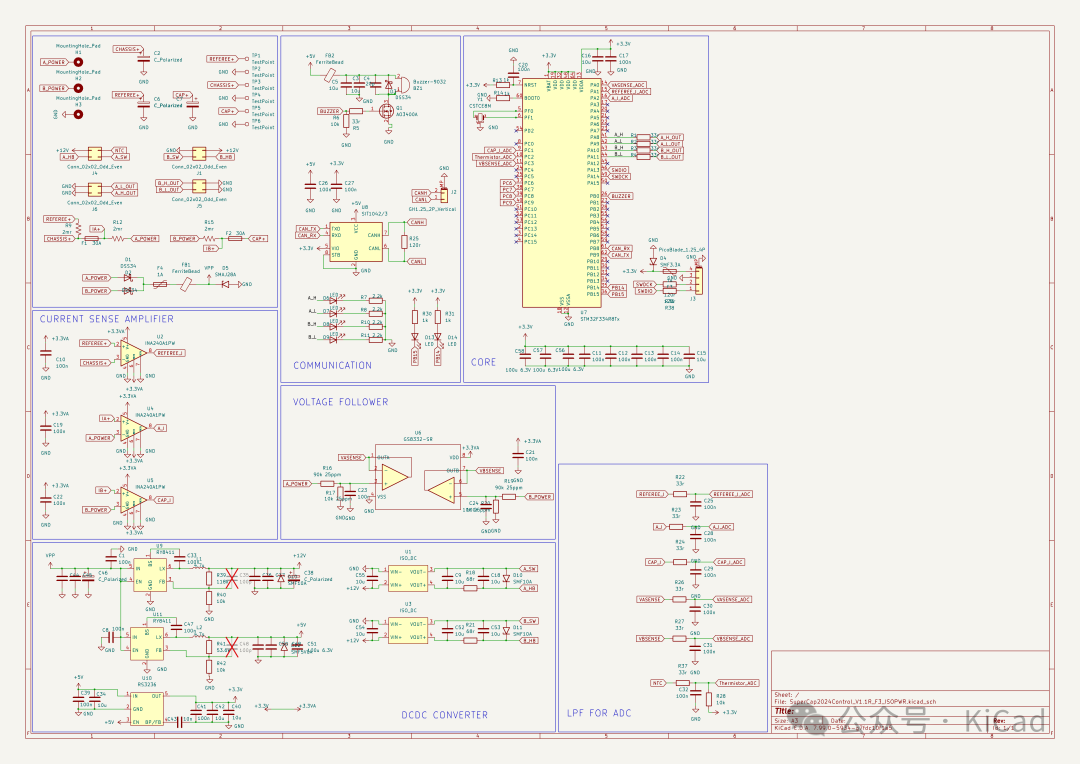
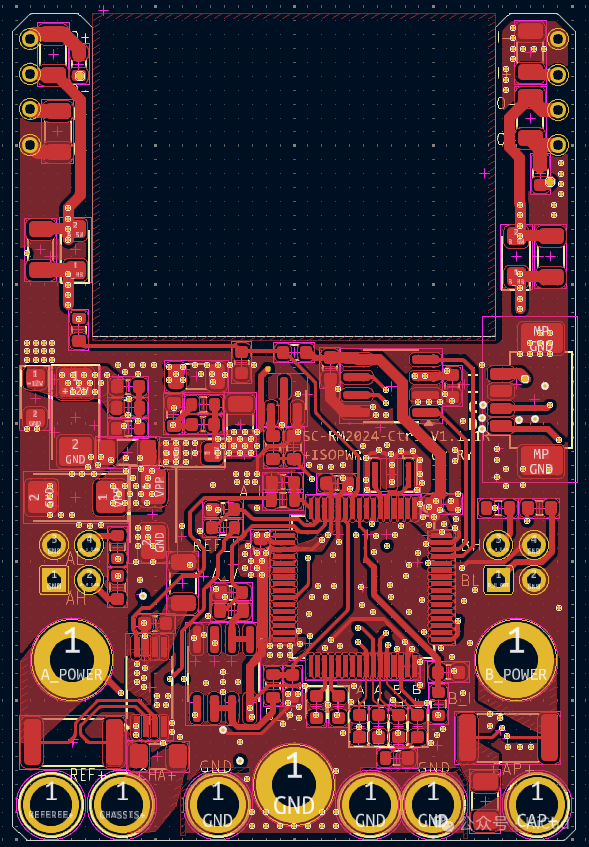
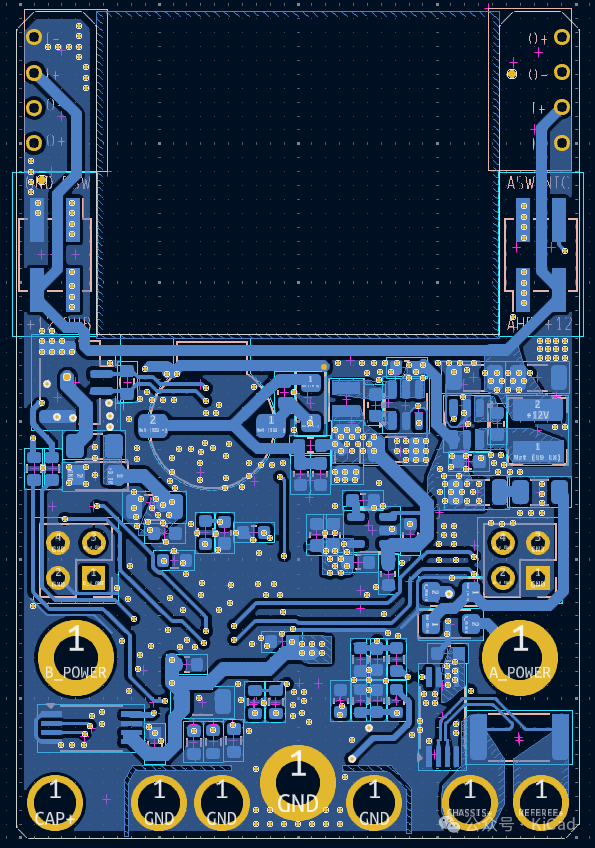

功率板
License
GPL 3.0
倉(cāng)庫(kù) & 下載
可以在Github中獲取開(kāi)源倉(cāng)庫(kù):
https://github.com/hkustenterprize/RM2024-SuperCapacitorController
Baidu 下載:

引用
RM2024-SuperCapcitorController -https://github.com/hkustenterprize/RM2024-SuperCapacitorController
RM2023-SuperCapcitorController - https://github.com/hkustenterprize/RM2023-SuperCapacitor
注意:如果想第一時(shí)間收到 KiCad 內(nèi)容推送,請(qǐng)點(diǎn)擊下方的名片,按關(guān)注,再設(shè)為星標(biāo)。
常用合集匯總:
和 Dr Peter 一起學(xué) KiCad
KiCad 8 探秘合集
KiCad 使用經(jīng)驗(yàn)分享
KiCad 設(shè)計(jì)項(xiàng)目(Made with KiCad)
常見(jiàn)問(wèn)題與解決方法
KiCad 開(kāi)發(fā)筆記
插件應(yīng)用
發(fā)布記錄
審核編輯 黃宇
-
控制器
+關(guān)注
關(guān)注
114文章
17059瀏覽量
183655 -
超級(jí)電容
+關(guān)注
關(guān)注
18文章
567瀏覽量
35720 -
KiCAD
+關(guān)注
關(guān)注
5文章
250瀏覽量
9435
發(fā)布評(píng)論請(qǐng)先 登錄
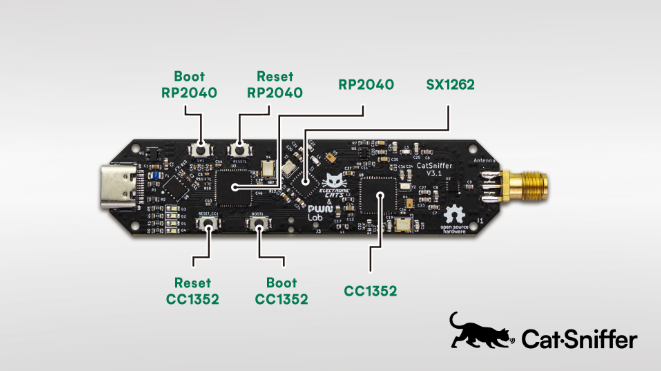
開(kāi)源 Made with KiCad(129):CatSniffer IoT 多協(xié)議工具
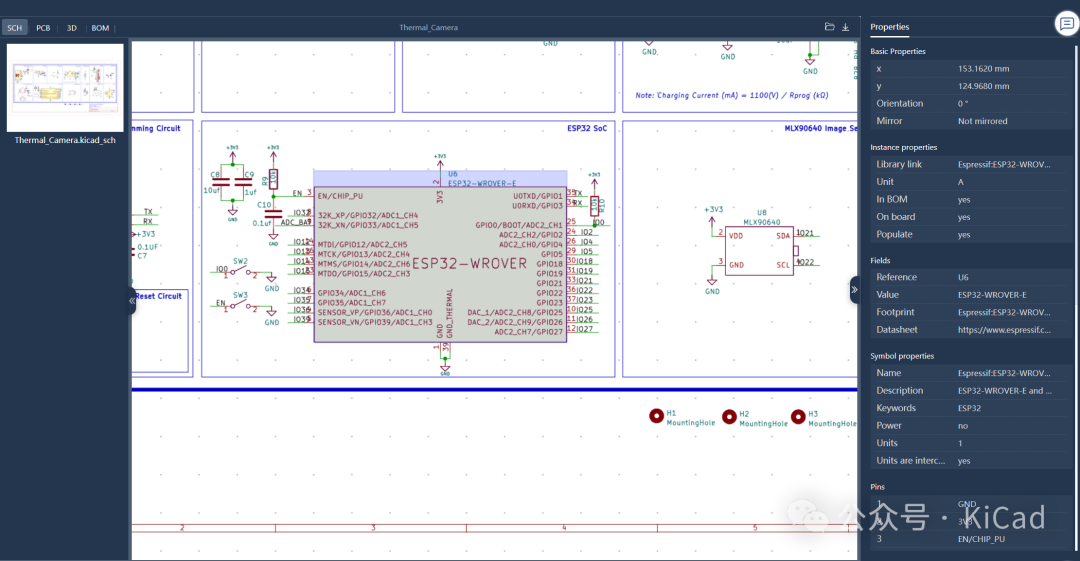
Made with KiCad(102):DIY 一個(gè)紅外熱成像儀
Made with KiCad(九十九):4 個(gè)ECU組成的微型 CAN 測(cè)試平臺(tái)
Made with KiCad(九十八):USB-C 的 Raspberry PiCo 2
Made with KiCad(122):ANAVI Miracle Emitter
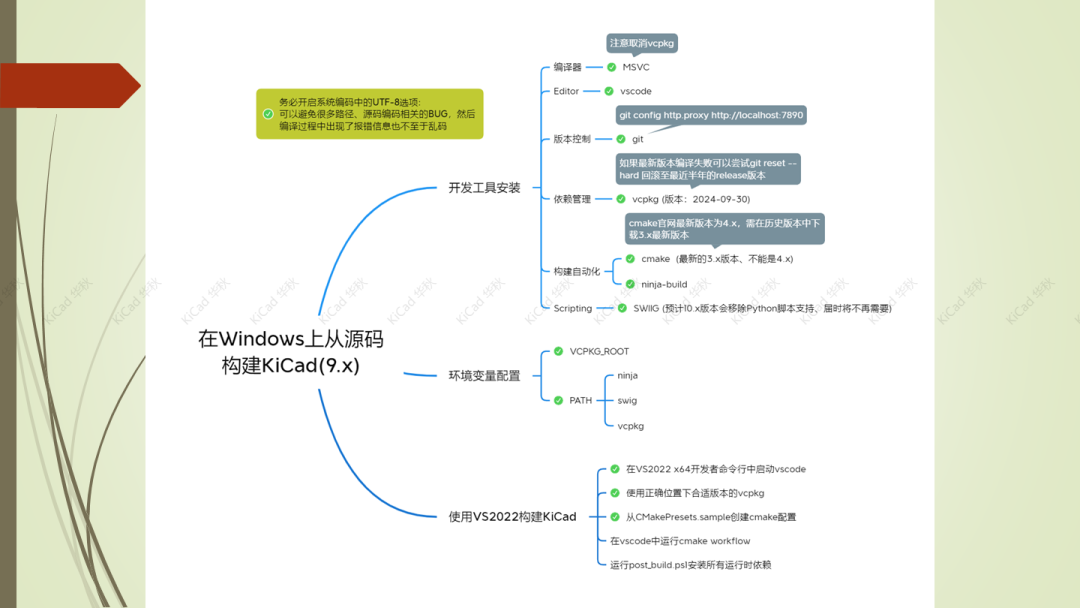
在 Windows 上編譯 KiCad
Made with KiCad(121):OpenRPNCalc 開(kāi)源科學(xué) RPN 計(jì)算器
Made with KiCad(118):Inkplate 4 TEMPERA 墨水屏終端

Made with KiCad(116):GreatFET One 硬件黑客最佳搭檔

Made with KiCad(111):Vimdrones AM32 ESC 開(kāi)發(fā)板

Made with KiCad(107):LattePanda-Mu 載板(Lite Carrier)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論