") 步行助力外骨骼機(jī)器人
步行助力外骨骼機(jī)器人

概述
步行助力外骨骼是一種穿戴在人體下肢的人機(jī)一體化機(jī)械裝置。它的優(yōu)越性在于能將支撐、運(yùn)動(dòng)、防護(hù)三項(xiàng)功能緊密結(jié)合,通過(guò)同步“跟隨”人體運(yùn)動(dòng),輔助人體負(fù)重行走,有效提升使用者的負(fù)載行動(dòng)能力。在康復(fù)訓(xùn)練中它能夠替代醫(yī)療人員進(jìn)行反復(fù)的康復(fù)工作,并能夠提供精準(zhǔn)的關(guān)節(jié)運(yùn)動(dòng)姿態(tài)和保護(hù)。 國(guó)內(nèi)下肢外骨骼系統(tǒng)的發(fā)展尚處于研究試驗(yàn)階段,其技術(shù)難點(diǎn)在于外骨骼對(duì)于人體運(yùn)動(dòng)的順應(yīng)性即外骨骼機(jī)器人的柔性。針對(duì)上述問(wèn)題,研發(fā)了一種步行助力外骨骼機(jī)器人,該機(jī)器人具有如下功能: (1)穿戴在人體腰部及下肢,可實(shí)現(xiàn)坐下/站起及負(fù)重行走。 (2)膝關(guān)節(jié)機(jī)構(gòu)能夠模擬人體膝關(guān)節(jié)的變速運(yùn)動(dòng),具有更好的順應(yīng)性。 (3)通過(guò)安裝在人體的IMU系統(tǒng)及力傳感器,可以實(shí)時(shí)檢測(cè)人體步態(tài)、下肢姿態(tài)及人機(jī)交互力,實(shí)現(xiàn)人機(jī)協(xié)同控制。
本文所研發(fā)的外骨骼機(jī)器人預(yù)期成果為: (1)設(shè)計(jì)膝關(guān)節(jié)變瞬心機(jī)構(gòu)模擬人體膝關(guān)節(jié)的變瞬心運(yùn)動(dòng); (2)采用繩驅(qū)動(dòng)將驅(qū)動(dòng)器和關(guān)節(jié)分開(kāi),減小關(guān)節(jié)質(zhì)量和慣量,增加關(guān)節(jié)柔性; (3)設(shè)計(jì)基于IMU系統(tǒng)和力位信息的滑模控制器,實(shí)現(xiàn)外骨骼機(jī)器人的人機(jī)協(xié)同行走,可用于人體下肢康復(fù)訓(xùn)練。
主要?jiǎng)?chuàng)新點(diǎn)
根據(jù)該類機(jī)器人現(xiàn)狀,考慮現(xiàn)有機(jī)器人的不足,本文研制了步行助力外骨骼機(jī)器人,主要完成以下內(nèi)容:首先設(shè)計(jì)機(jī)器人結(jié)構(gòu)和控制系統(tǒng),其次分析正常人步行時(shí)的基本步態(tài)并通過(guò)IMU進(jìn)行檢測(cè),再者完成基于力位信息的模糊滑模控制,接著進(jìn)行機(jī)器人樣機(jī)試驗(yàn),最后總結(jié)。 主要?jiǎng)?chuàng)新點(diǎn)如下: (1)設(shè)計(jì)膝關(guān)節(jié)變瞬心機(jī)構(gòu)模擬人體膝關(guān)節(jié)的變瞬心運(yùn)動(dòng); (2)采用繩驅(qū)動(dòng)將驅(qū)動(dòng)器和關(guān)節(jié)分開(kāi),減小了關(guān)節(jié)質(zhì)量和慣量,增加了關(guān)節(jié)柔性; (3)設(shè)計(jì)基于IMU系統(tǒng)和力位信息的滑模控制器,實(shí)現(xiàn)外骨骼機(jī)器人的人機(jī)協(xié)同行走,可用于人體下肢康復(fù)訓(xùn)練。
系統(tǒng)架構(gòu)
1.步行助力外骨骼機(jī)器人設(shè)計(jì)需求與總體方案
1.1 設(shè)計(jì)需求分析
1.1.1運(yùn)動(dòng)需求分析
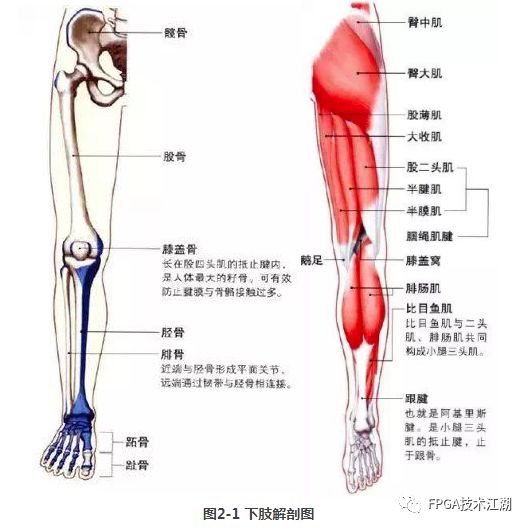
本文研制的外骨骼機(jī)器人針對(duì)下肢步行助力及重量傳遞兩種使用環(huán)境。在人前進(jìn)過(guò)程中,下肢通過(guò)腿肌帶動(dòng)各關(guān)節(jié)的旋轉(zhuǎn),從而進(jìn)行雙腿的彎曲和伸直,人體整體始終處于平衡——重心前移——失衡——支撐平衡的運(yùn)動(dòng)狀態(tài)。因此人在運(yùn)動(dòng)過(guò)程中無(wú)論是慢走還是跑步都包含著抬腿與支撐兩項(xiàng)助力項(xiàng),對(duì)應(yīng)著各關(guān)節(jié)的正逆旋轉(zhuǎn)運(yùn)動(dòng)。下肢關(guān)節(jié)包含著髖關(guān)節(jié)、膝關(guān)節(jié)、踝關(guān)節(jié),下肢結(jié)構(gòu)解剖圖如圖2-1所示。
步行需要全身的大部分肌肉共同配合才能實(shí)現(xiàn)。整個(gè)步行過(guò)程由重心的位移、骨盆翻轉(zhuǎn)、髖關(guān)節(jié)、膝關(guān)節(jié)、踝關(guān)節(jié)的組合運(yùn)動(dòng)以及上肢的平衡調(diào)節(jié)運(yùn)動(dòng)組合而成,從而實(shí)現(xiàn)人體的向前行走。人體的一個(gè)步態(tài)周期是指人在行走時(shí)一只腳的腳跟和地面接觸到該腳的腳跟再次和地面接觸的過(guò)程。根據(jù)上述人體運(yùn)動(dòng)學(xué)的分析,機(jī)器人的運(yùn)動(dòng)需要滿足以下需求。
1)機(jī)器人需要實(shí)現(xiàn)人體下肢步行時(shí)的基本運(yùn)動(dòng),包括髖關(guān)節(jié)、膝關(guān)節(jié)及踝關(guān)節(jié)的運(yùn)動(dòng),同時(shí)要進(jìn)行關(guān)節(jié)運(yùn)動(dòng)限位以保障穿戴者的安全。
2) 減輕外骨骼的質(zhì)量與體積,輕量化外骨骼同時(shí)也是為了使外骨骼更加緊湊,提高控制的精確度和更優(yōu)的人機(jī)交互性能。 3)外骨骼機(jī)器人應(yīng)具備一定的柔性,盡量順應(yīng)人體運(yùn)動(dòng)趨勢(shì),能實(shí)現(xiàn)各關(guān)節(jié)“同步”伴隨運(yùn)動(dòng),不應(yīng)當(dāng)產(chǎn)生阻礙運(yùn)動(dòng),同時(shí)具備一定的緩沖性能。
1.1.2控制系統(tǒng)需求
本文設(shè)計(jì)的外骨骼機(jī)器人控制系統(tǒng)需求如下: 1)步行軌跡:控制機(jī)器人完成模仿人體步態(tài)的步行運(yùn)動(dòng) 2)人機(jī)交互:可以改變機(jī)器人的工作狀態(tài),對(duì)機(jī)器人的速度,步態(tài)相進(jìn)行有效控制,并進(jìn)行人機(jī)協(xié)同。 3)步態(tài)檢測(cè):可以實(shí)時(shí)獲取機(jī)器人和使用者所處的步態(tài)相和下肢姿態(tài)。 4)系統(tǒng)可擴(kuò)展性,兼容性:預(yù)留一定的接口方便其余子模塊接入系統(tǒng)并且具有一定的兼容性。 1.2 外骨骼機(jī)器人總體方案外骨骼機(jī)器人系統(tǒng)的總體設(shè)計(jì)直接影響到機(jī)器人的使用性能和工作效率,需要以系統(tǒng)全面的觀點(diǎn)來(lái)進(jìn)行綜合考慮。考慮到通信、能源供給等需求,本文的外骨骼機(jī)器人系統(tǒng)總體設(shè)計(jì)方案采用了無(wú)線式機(jī)器人設(shè)計(jì)方案。該方案的特點(diǎn)是:機(jī)器人采用無(wú)線作業(yè)方式,外骨骼機(jī)器人的能源供給通過(guò)隨身蓄電池實(shí)現(xiàn),運(yùn)動(dòng)控制以及陀螺儀信號(hào)的傳輸通過(guò)無(wú)線模塊實(shí)現(xiàn),并由后續(xù)儀器設(shè)備進(jìn)行相應(yīng)地處理。按照該方案,外骨骼機(jī)器人系統(tǒng)主要由外骨骼機(jī)器人本體、機(jī)器人控制系統(tǒng)、上位機(jī)等部分組成。
1.2.1外骨骼機(jī)器人本體總體方案
將髖關(guān)節(jié)、膝關(guān)節(jié)、踝關(guān)節(jié)進(jìn)行關(guān)節(jié)模塊化設(shè)計(jì),使不同關(guān)節(jié)可以進(jìn)行自由度的增減配置,同時(shí)可以方便對(duì)故障關(guān)節(jié)進(jìn)行針對(duì)性修復(fù)及調(diào)試。每個(gè)關(guān)節(jié)模塊由機(jī)械部分和控制部分構(gòu)成。機(jī)械模塊集成了Maxon伺服電機(jī)與編碼器、陀螺儀、行星齒輪減速器、傳動(dòng)零件和零位開(kāi)關(guān);控制模塊由驅(qū)動(dòng)器、通信接口、傳感器信號(hào)處理器和控制器組成。驅(qū)動(dòng)器使用并行通信的方式與電機(jī)和編碼器進(jìn)行連接,機(jī)器人控制器通過(guò)CAN總線與驅(qū)動(dòng)器連接,通過(guò)驅(qū)動(dòng)電機(jī)帶動(dòng)關(guān)節(jié)運(yùn)動(dòng);控制器獲取機(jī)器人傳感器信息,實(shí)時(shí)監(jiān)控關(guān)節(jié)運(yùn)動(dòng)參數(shù)。1)自由度配置及關(guān)節(jié)限位根據(jù)人體下肢運(yùn)動(dòng)機(jī)理的分析,將機(jī)器人的關(guān)節(jié)設(shè)置為髖關(guān)節(jié)三個(gè)自由度,膝關(guān)節(jié)一個(gè)自由度(電機(jī)驅(qū)動(dòng))以及踝關(guān)節(jié)兩個(gè)自由度。同時(shí)由于膝關(guān)節(jié)的變速運(yùn)動(dòng)特性,需要設(shè)計(jì)一種能夠模擬人體膝關(guān)節(jié)運(yùn)動(dòng)特性的機(jī)構(gòu)。另外為了人體關(guān)節(jié)運(yùn)動(dòng)的安全性和機(jī)器人的承重能力,需要在關(guān)節(jié)處進(jìn)行限位。所有的機(jī)械限位均根據(jù)人體下肢各關(guān)節(jié)運(yùn)動(dòng)范圍進(jìn)行設(shè)計(jì)。2)柔性繩驅(qū)方案
為了避免關(guān)節(jié)慣量過(guò)大,在膝關(guān)節(jié)采用繩驅(qū)動(dòng),將電機(jī)和減速器布置在大腿(后期置于腰部),通過(guò)鮑登線傳遞動(dòng)力。采用該種驅(qū)動(dòng)方式能夠在有效減小機(jī)械結(jié)構(gòu)尺寸和降低復(fù)雜性的同時(shí),提高機(jī)械系統(tǒng)的可靠性。3)人機(jī)連接方案
人機(jī)交互是上肢康復(fù)外骨骼機(jī)器人系統(tǒng)的一個(gè)典型特征,人機(jī)交互的兩個(gè)最主要的目標(biāo)就是實(shí)現(xiàn)舒適性和安全性,安全性主要依賴機(jī)器人結(jié)構(gòu)本身的限位以及機(jī)器人的運(yùn)動(dòng)控制等方面,舒適性在很大程度上依賴于穿戴者下肢和下肢外骨骼機(jī)器人的固定裝置方案。本文為了減輕質(zhì)量,采用單邊固定形式,即外骨骼機(jī)器人與穿戴者下肢之間的約束形式為單邊固定,這樣的固定方式存在的缺點(diǎn)是上肢會(huì)相對(duì)機(jī)器人轉(zhuǎn)動(dòng)。為了解決該問(wèn)題,設(shè)計(jì)弧形固定和多處固定,更容易和上肢緊密貼合。
1.2.2外骨骼機(jī)器人控制系統(tǒng)方案
為了滿足控制系統(tǒng)需求,將控制系統(tǒng)劃分為三個(gè)獨(dú)立的工作層,三個(gè)工作層從高到低依次為人機(jī)交互層、主控層和功能層,后兩層位于機(jī)器人移動(dòng)載體中,不同層之間通過(guò)通訊來(lái)實(shí)現(xiàn)信息交換。三個(gè)工作層分別有如下特點(diǎn):
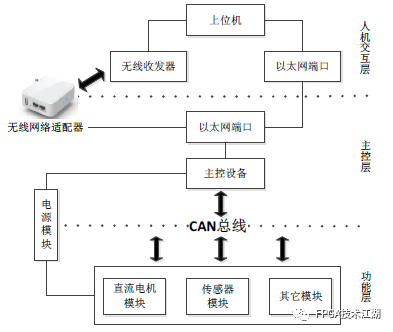
圖2-2 控制系統(tǒng)總體框圖 1)人機(jī)交互層:人機(jī)交互層是控制系統(tǒng)提供給使用者的操作接口,操作者可以通過(guò)該接口對(duì)機(jī)器人進(jìn)行模式設(shè)定、功能選擇、數(shù)據(jù)顯示等功能,同時(shí)可以獲取機(jī)器人運(yùn)動(dòng)過(guò)程中反饋的各種信息。 2)主控層:主控層主要包括兩個(gè)方面:其一是作為人機(jī)交互層與功能層的信息橋梁,操作者的指令通過(guò)主控層傳遞給功能層,實(shí)現(xiàn)相應(yīng)的動(dòng)作;其二是為控制系統(tǒng)提供大量其他功能模塊的接口。 3)功能層:功能層是控制系統(tǒng)的核心,執(zhí)行操作者相應(yīng)的控制指令,包括對(duì)電機(jī)驅(qū)動(dòng)器的控制、傳感器信號(hào)的采集與處理等。
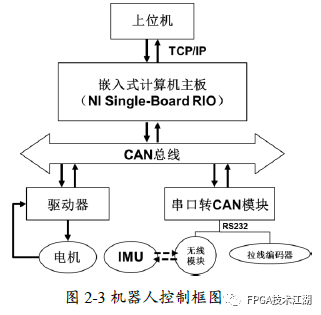
機(jī)器人控制系統(tǒng)的總體框圖如圖2-2所示,人機(jī)交互層與主控層通過(guò)以太網(wǎng)或者無(wú)線通訊相連,系統(tǒng)在主控層與功能層之間采用基于CAN協(xié)議總線的通訊方式實(shí)現(xiàn)信息交互。 2.步行助力外骨骼機(jī)器人控制系統(tǒng)搭建2.1 控制系統(tǒng)方案設(shè)計(jì)外骨骼機(jī)器人控制系統(tǒng)框圖如圖2-3所示,主要分為以下六個(gè)模塊: 1)驅(qū)動(dòng)執(zhí)行模塊:驅(qū)動(dòng)執(zhí)行模塊是實(shí)現(xiàn)運(yùn)動(dòng)控制的核心,為外骨骼機(jī)器人運(yùn)動(dòng)提供動(dòng)力。對(duì)于本控制系統(tǒng),驅(qū)動(dòng)執(zhí)行模塊主要由電機(jī)、減速器、編碼器和相應(yīng)的驅(qū)動(dòng)器組成; 2)傳感器模塊:外骨骼機(jī)器人通過(guò)傳感器模塊檢測(cè)機(jī)器人姿態(tài)信息和其所處步態(tài)相,為機(jī)器人各種運(yùn)動(dòng)控制策略的實(shí)現(xiàn)提供判斷依據(jù); 3)控制器模塊:各個(gè)工作層在其主控制器的控制下,通過(guò)信息交互實(shí)現(xiàn)系統(tǒng)對(duì)任務(wù)的綜合協(xié)調(diào)與分配; 4)上位機(jī)模塊:實(shí)現(xiàn)人與機(jī)器人的信息交互以及操作者對(duì)機(jī)器人運(yùn)動(dòng)的有效控制,并時(shí)刻了解機(jī)器人的運(yùn)行狀態(tài); 5)供電系統(tǒng):供電系統(tǒng)為控制系統(tǒng)中所有硬件的正常工作提供能量,為機(jī)器人運(yùn)動(dòng)的穩(wěn)定性提供保障;
設(shè)計(jì)演示
1.單關(guān)節(jié)空載實(shí)驗(yàn)
搭建完成后外骨骼機(jī)器人實(shí)驗(yàn)平臺(tái)后,需要對(duì)外骨骼機(jī)器人基本運(yùn)動(dòng)功能進(jìn)行測(cè)試,以檢驗(yàn)實(shí)驗(yàn)平臺(tái)運(yùn)行的安全性和可用性,為此進(jìn)行了外骨骼單關(guān)節(jié)運(yùn)動(dòng)測(cè)試,以及運(yùn)動(dòng)范圍的測(cè)試,。
檢測(cè)外骨骼膝關(guān)節(jié)的運(yùn)動(dòng)范圍,測(cè)試結(jié)果表明當(dāng)穿戴外骨骼時(shí)的運(yùn)動(dòng)角度要小于人體膝關(guān)節(jié)運(yùn)動(dòng)極限,這樣能夠較好地保證穿戴者的安全。
2.人機(jī)固定軌跡跟隨實(shí)驗(yàn)
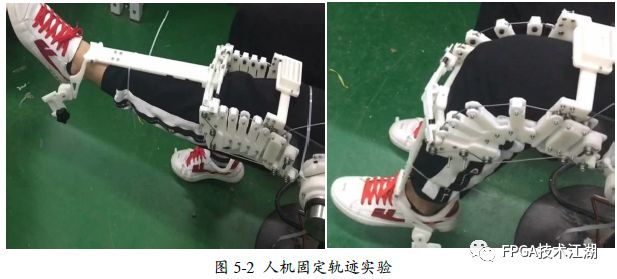
固定軌跡是一個(gè)預(yù)先設(shè)定好的、與正常穿戴者動(dòng)作相仿的運(yùn)動(dòng)軌跡。由于 助力外骨骼機(jī)器人也能夠面向康復(fù)使用,因此有必要進(jìn)行固定軌跡下的跟隨實(shí)驗(yàn),同時(shí)為了測(cè)試第四章所提出的模糊增益滑模控制,與一般的 PID 控制做對(duì)比。實(shí)驗(yàn)過(guò)程如圖 5-2 所示,將下肢外骨骼機(jī)器人用架子掛起,穿戴者的一條腿穿戴好外骨骼,上電后隨外骨骼腿進(jìn)行固定軌跡的跟蹤。
首先基于普通PID 算法對(duì)CGA 軌跡進(jìn)行跟蹤,實(shí)驗(yàn)完畢后,記錄實(shí)驗(yàn)誤差,分析實(shí)驗(yàn)數(shù)據(jù)。 40.9cos(1.04t ?0.208)+157cos(5.82t ?0.047) +82.3cos(7.49t ?4.13) (5-1) 在該實(shí)驗(yàn)中,設(shè)置 PD 參數(shù)為K p = diag(50,50),Kd = diag(50,50)。從圖中可以看出,軌跡跟蹤曲線與指令曲線基本吻合,這表明人體穿戴上外骨骼后仍能很好地實(shí)現(xiàn)預(yù)訂軌跡的執(zhí)行,證明 PID 控制方法在該系統(tǒng)中已經(jīng)能夠達(dá)到一定效果。但由于模型不精確、外界干擾大等因素,還是存在一定的誤差,因此還需要進(jìn)一步使用自適應(yīng)算法進(jìn)行跟蹤。
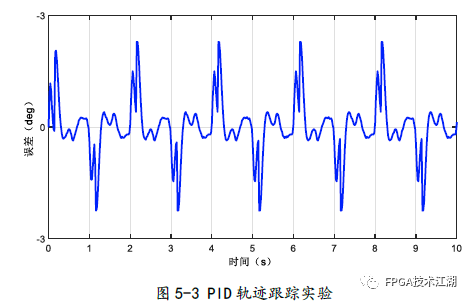
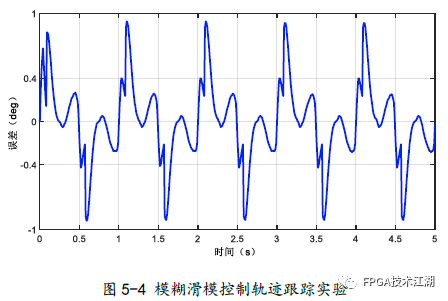
如圖5-3 所示,膝關(guān)節(jié)最大跟蹤誤差為2.35°,由此看來(lái)應(yīng)用普通PID 控制已經(jīng)能夠?qū)崿F(xiàn)一定程度的估計(jì)跟蹤,但是存在較大的跟蹤誤差。作為比較,我們使用所提出的模糊增益滑模算法進(jìn)行軌跡的跟蹤,跟蹤曲線如圖5.4 所示。在該實(shí)驗(yàn)中,設(shè)置滑模面參數(shù)為A= diag(50,50),K =diag(100,100)。如圖5-4 所示,膝關(guān)節(jié)最大跟蹤誤差為 0.86°,由此可見(jiàn),所提出的模糊增益滑模控制能夠較大程度地降低跟蹤誤差,顯示出對(duì)于較強(qiáng)的不準(zhǔn)確模型參數(shù)的適應(yīng)性,因此,最終實(shí)驗(yàn)結(jié)果證明所提出的模糊增益滑模控制策略在本系統(tǒng)的使用中非常有效,滿足使用要求。
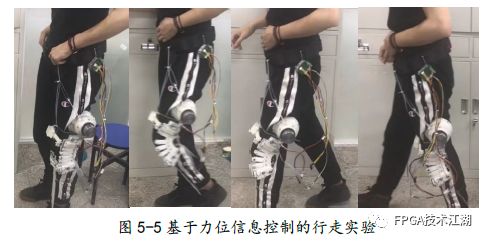
3.基于力位信息控制的隨動(dòng)行走實(shí)驗(yàn)基于第三章所提出的力位信息控制算法,對(duì)下肢外骨骼樣機(jī)系統(tǒng)進(jìn)行測(cè)試。實(shí)驗(yàn)人員穿戴好下肢外骨骼機(jī)器人,將膝關(guān)節(jié)調(diào)整至外骨骼關(guān)節(jié)旋轉(zhuǎn)中心與人體旋轉(zhuǎn)中心重合,穿戴者系緊肩帶與腰封,并綁緊壓力鞋綁帶,啟動(dòng)電氣開(kāi)關(guān),使用整個(gè)下肢外骨骼機(jī)器人上電,記錄此時(shí)各傳感器初始數(shù)據(jù),行走過(guò)程如圖5-5 所示。
通過(guò)電機(jī)編碼器記錄行走過(guò)程中髖關(guān)節(jié)及膝關(guān)節(jié)的位置、速度和控制力矩曲線,如圖 5-6 所示。
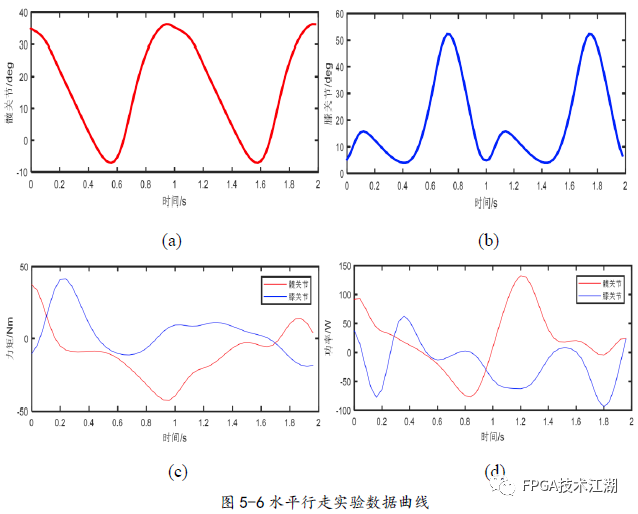
從圖5-6 (a)和(b)的關(guān)節(jié)角度曲線可以看出,HEXO 具有良好行進(jìn)效果,行走過(guò)程比較平穩(wěn),其曲線與 CGA 曲線基本吻合。外骨骼機(jī)器人能夠隨穿戴者以較快速度行進(jìn),行進(jìn)速度最高可達(dá)到 4km/h。從圖 5-6(c)中可以看出,驅(qū)動(dòng)關(guān)節(jié)的峰值力矩都 50Nm 左右,在驅(qū)動(dòng)模塊的承載范圍之內(nèi),行進(jìn)過(guò)程中阻力較小,穿戴者可以較輕松地完成行走動(dòng)作。從圖 5-6 (d)中可以看出,髖關(guān)節(jié)的最大功率在 140W 左右,膝關(guān)節(jié)的最大功率在 95W 左右,所使用的驅(qū)動(dòng)電機(jī)的功率為150W,能夠滿足最大速度行進(jìn)的要求。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29615瀏覽量
212195 -
外骨骼機(jī)器人
+關(guān)注
關(guān)注
1文章
64瀏覽量
5517
原文標(biāo)題:步行助力外骨骼機(jī)器人
文章出處:【微信號(hào):HXSLH1010101010,微信公眾號(hào):FPGA技術(shù)江湖】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
殺入千元級(jí)!外骨骼機(jī)器人賣(mài)斷貨,這些電機(jī)企業(yè)加速卡位

從機(jī)械傳動(dòng)到智能協(xié)同,雅特力助力外骨骼機(jī)器人應(yīng)用創(chuàng)新發(fā)展

外骨骼機(jī)器人產(chǎn)業(yè)鏈的機(jī)遇與挑戰(zhàn)
Wandercraft借助NVIDIA技術(shù)開(kāi)發(fā)個(gè)人外骨骼設(shè)備
盤(pán)點(diǎn)#機(jī)器人開(kāi)發(fā)平臺(tái)
外骨骼機(jī)器人爆火,到底是不是智商稅?
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門(mén)的引路書(shū)
為控制Mercury X1和Mercury B1機(jī)械臂而設(shè)計(jì)的創(chuàng)新外骨骼

【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+兩本互為支持的書(shū)
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
鴻蒙機(jī)器人與鴻蒙開(kāi)發(fā)板聯(lián)動(dòng)演示
地瓜機(jī)器人與廣和通深度合作,共驅(qū)智能機(jī)器人商用落地

「知識(shí)講堂」外骨骼康復(fù)機(jī)器人醫(yī)療器械分類、標(biāo)準(zhǔn)、注冊(cè)指導(dǎo)原則






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論