 H60.XYZTR5六自由度并聯機構
H60.XYZTR5六自由度并聯機構

隨著科研及工業領域科技的不斷提升,對于靈活運動且高精密的定位系統需求越來越多。芯明天研發生產壓電納米定位臺可產生1~6軸運動,可直線,可偏轉,且速度快、精度高,可廣泛用于半導體、光學、醫療、航空航天、生物科技等微納操作領域。
H60.XYZTR5六自由度并聯機構
H60.XYZTR5系列六自由度并聯機構壓電納米定位臺,是X、Y、Z、θx、θy、θz六軸運動定位臺,內置高可靠性壓電陶瓷作為驅動源,通過六支壓電促動器的協調伸縮,配合先進的控制算法,實現空間內1~6維的精密直線及角度運動,臺體結構緊湊。由于采用了并聯運動設計,它可以執行復雜的多軸運動軌跡,閉環版本配置高精度傳感器對位置進行實時監測反饋,實現納米級的精密定位控制,具有高剛度、高可靠性和重復性。此版本為真空版本,可進行真空環境適配。產品外觀如下圖所示。
產品特點
六自由度運動
大承載
閉環定位精度高
誤差無積累
產品應用
半導體設備
光學
晶圓檢測微加工
醫療
航空航天
技術參數
| 型號 | H60.XYZTR5S/K |
| 運動自由度 | X、Y、Z、θx、θy、θz |
| 驅動控制 | 6路驅動,6路傳感 |
| X、Y軸標稱行程范圍(0~120V) | ±40μm |
| Z軸標稱行程范圍(0~120V) | ±27.5μm |
| θx、θy軸偏擺角度范圍(0~120V) | ±0.6mrad |
| θz軸旋轉角度范圍(0~120V) | ±0.8mrad |
| θx、θy、θz軸偏擺分辨率 | 優于0.5μrad |
| X、Y、Z軸位移分辨率 | 優于0.5nm |
| 閉環線性度 | 優于0.1%F.S. |
| 閉環重復定位精度 | 優于0.1%F.S. |
| 結構形式 | 六自由度并聯式 |
| 驅動方式 | 壓電陶瓷促動器驅動 |
| 承載能力 | 5kg |
| 重量 | 1300g |
配套控制器
E70.D6S壓電控制器非常適用于驅動H60.XYZTR5六自由度壓電運動平臺。E70.D6S是一款大功率、低功耗、高帶寬、低紋波噪聲的壓電陶瓷控制器。E70.D6S為2個模塊化E70系列壓電陶瓷控制器級聯形成,單個E70模塊通道數為3通道,最多可級聯32個模塊,達96通道。控制器采用DC24V供電,可通過外部模擬信號或RS-422接口數字通信進行控制、開/閉環可選、集成式PZT&sensor接口便于連接,外部可設定控制功能,操作簡單便捷。

審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
定位
+關注
關注
5文章
1435瀏覽量
35925
發布評論請先 登錄
相關推薦
熱點推薦
人形機器人“靈巧手”,正在接近27個自由度的人手
電子發燒友網報道(文/黃晶晶)靈巧手是人形機器人核心零部件之一,以人類的手來看通常被認為具有27個自由度,自由度越高,其動作越精細。特斯拉二代Optimus的靈巧手已經擁有22個自由度。 靈巧

十字形多自由度超聲電機接觸分析模型研究
摘 要:十字形多自由度超聲電機其動子繞X、Y軸旋轉與繞Z軸旋轉的驅動機理是不同的,根據彈性接觸理論,對其進行了分別考慮,并建立了電機摩擦接觸分析模型。利用建立的模型,對多自由度電機機械特性進行了估算
發表于 06-17 09:04
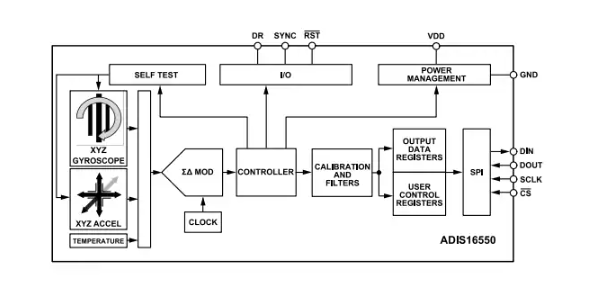
Analog Devices Inc. ADIS16550六自由度慣性傳感器數據手冊
Analog Devices ADIS16550六自由度慣性傳感器是一款完整的慣性系統,內置一個三軸陀螺儀和一個三軸加速度計。ADIS16550中的每個慣性傳感器都將業界領先的僅MEMS技術與信號調理相結合,具有經過優化的動態性能。

多維高精度定位解決方案 H64A.XYZTR2S/K-C系列壓電納米偏擺臺
需求——多自由度、高精度、快速響應的精密運動。H64A.XYZTR2S/K-C系列壓電納米偏擺臺為六自由度運動高精度壓電偏擺臺,利用壓電驅動技術,為光學、半導體、生物醫療、微納制造等領

ZED60-24S12AN-H ZED60-24S12AN-H
電子發燒友網為你提供AIPULNION(AIPULNION)ZED60-24S12AN-H相關產品參數、數據手冊,更有ZED60-24S12AN-H的引腳圖、接線圖、封裝手冊、中文資料、英文資料,ZED60-24S12AN-H真
發表于 03-21 18:47

ZCD60-110S12N-H ZCD60-110S12N-H
電子發燒友網為你提供AIPULNION(AIPULNION)ZCD60-110S12N-H相關產品參數、數據手冊,更有ZCD60-110S12N-H的引腳圖、接線圖、封裝手冊、中文資料、英文資料,ZCD60-110S12N-H真
發表于 03-21 18:47
FA60-220S15H2N5 FA60-220S15H2N5
電子發燒友網為你提供AIPULNION(AIPULNION)FA60-220S15H2N5相關產品參數、數據手冊,更有FA60-220S15H2N5的引腳圖、接線圖、封裝手冊、中文資料、英文資料,FA60-220S15H2N5真
發表于 03-19 18:29
阿童木高速重載并聯機器人效能拉滿
在工業自動化領域,并聯機器人憑借高速度優勢,廣泛應用于輕小散亂物料搬運分揀與上下料環節,也正如此,并聯機器人長期被貼上“輕型敏捷”的標簽:3C電子產線上精準靈巧分揀電子元器件,廣大制藥企業藥品自動化

翼菲并聯機器人通過MTBF 20000小時認證
經過嚴格而全面的測試,翼菲并聯機器人成功通過MTBF(平均無故障工作時間)20000小時認證,這一里程碑式的成就,不僅標志著翼菲機器人在可靠性方面達到了國際領先水平,更是國內并聯機器人行業首次完成

功率放大器在重力輔助式Z自由度壓電慣性雙向平順驅動研究中的應用
實驗名稱:功率放大器在重力輔助式Z自由度壓電慣性雙向平順驅動研究中的應用研究方向:精密驅動與定位實驗內容:測試了其頻率特性、水平負載特性、位移曲線、電壓特性、分辨力及其在顯微成像中的應用測試目的
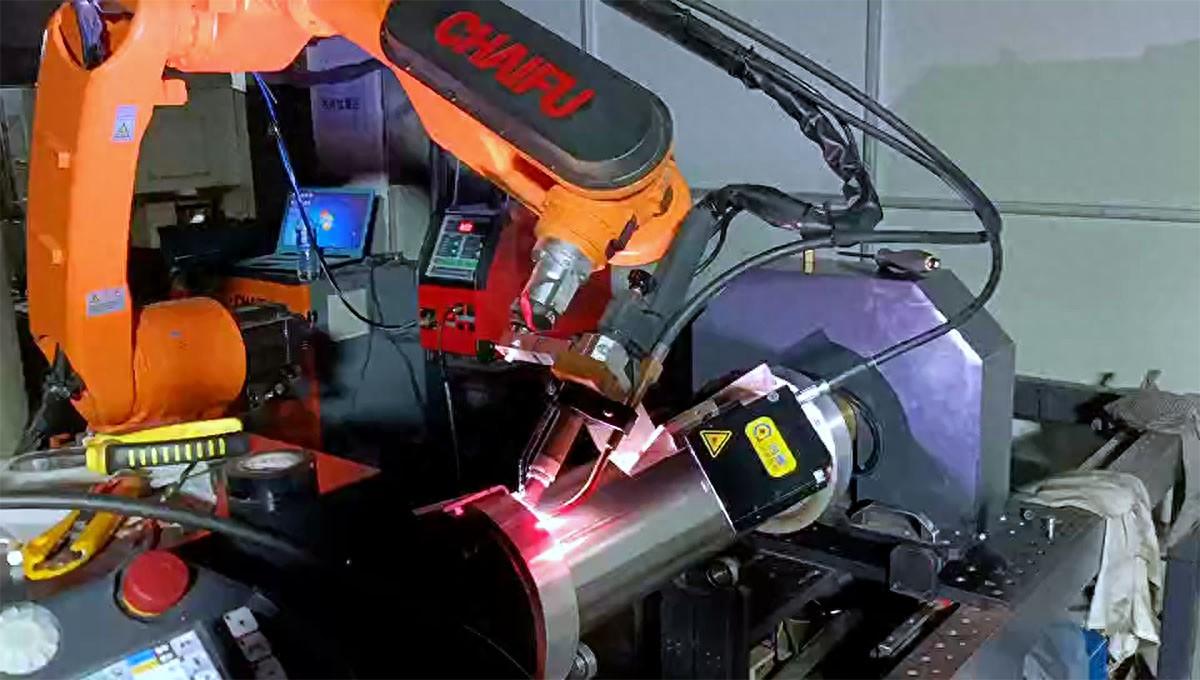
六軸焊接機器人多久檢修一次
焊接機器人多久檢修一次? ??一、六軸焊接機器人的工作原理 ??六軸焊接機器人是一種具備六個自由度的自動化設備,可以進行復雜的焊接操作。這些機器人通常由控制系統、驅動系統、執行





 工商網監
工商網監
評論