") 超越人類視覺!昱感微“多維像素”多模態(tài)超級(jí)攝像頭方案產(chǎn)品賦能超凡感知力
超越人類視覺!昱感微“多維像素”多模態(tài)超級(jí)攝像頭方案產(chǎn)品賦能超凡感知力

如今人工智能發(fā)展之日新月異,令人不由感嘆也許科幻電影里仿生人的應(yīng)用不再是遙不可及,那么未來AI會(huì)超越人類甚至取代人類嗎?也許現(xiàn)在AI的大腦還無法做到,但眼睛已經(jīng)做到,機(jī)器視覺的感知力已全面超越人類視覺——人眼只能感知所見目標(biāo)大概的距離/位置/速度以及外觀信息,并且受到天氣、光線等因素影響較大;昱感微“多維像素”多模態(tài)感知方案的超級(jí)攝像頭每秒可輸出30幀(甚至更高頻率)多模態(tài)融合感知數(shù)據(jù),每一幀不僅有高清圖像數(shù)據(jù),還有對(duì)應(yīng)像素級(jí)的目標(biāo)精準(zhǔn)3D空間位置坐標(biāo)距離、速度、溫度(目標(biāo)熱輻射)、對(duì)應(yīng)材質(zhì)(RCS)等數(shù)據(jù),并且感知力不受天氣、光線等因素影響。
多模態(tài)融合感知的“多維像素”數(shù)據(jù)
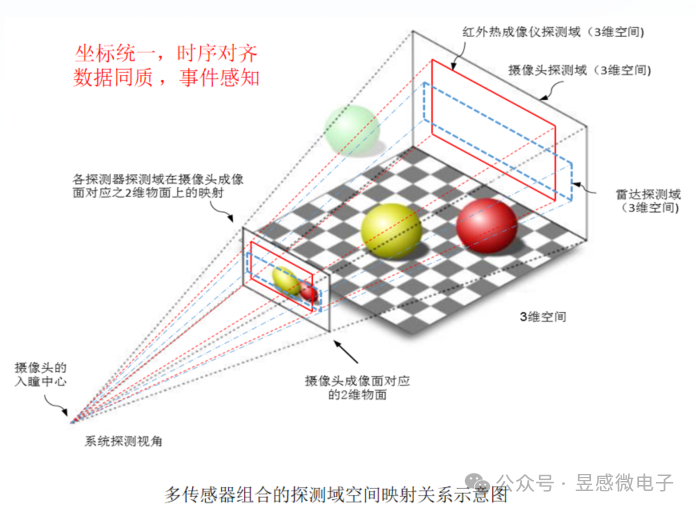
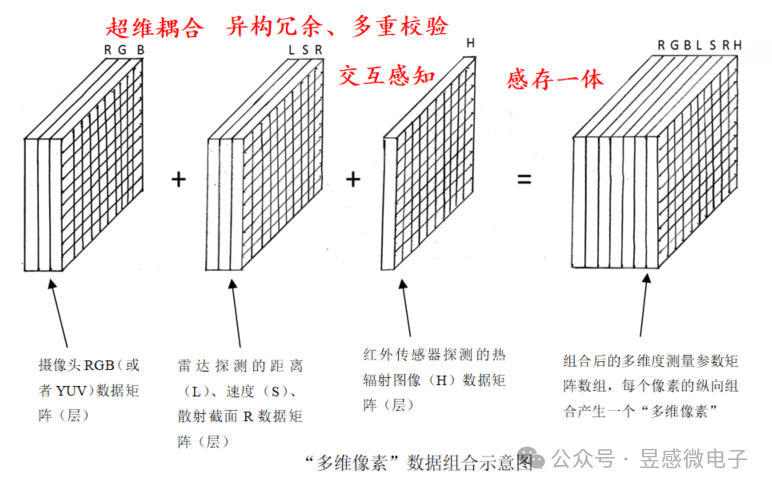
那么昱感微“多維像素”多模態(tài)感知超級(jí)攝像頭是如何做到的呢?首先,昱感微采用最前沿的多維像素多模態(tài)前融合技術(shù),將可見光攝像頭、紅外攝像頭、4D毫米波雷達(dá)/激光雷達(dá)的探測(cè)數(shù)據(jù)在前端(數(shù)據(jù)獲取時(shí))融合,并將各傳感器的探測(cè)數(shù)據(jù)“坐標(biāo)統(tǒng)一、時(shí)序?qū)R”,最后以“多維像素”的數(shù)據(jù)格式輸出;昱感微的核心技術(shù)創(chuàng)新——“多維像素”,它是指在可見光攝像頭像素信息上加上其它傳感器對(duì)于同源目標(biāo)感知的信息:即圖像數(shù)據(jù)+雷達(dá)探測(cè)目標(biāo)的距離、速度、散射截面R的感知數(shù)據(jù)+紅外傳感器探測(cè)的熱輻射圖像數(shù)據(jù)疊加組合到一起,以攝像頭的像素為顆粒度組合全部感知數(shù)據(jù),每個(gè)像素不僅有視覺信息,還包含了雷達(dá)和紅外傳感器的探測(cè)數(shù)據(jù),形成多維度(多模態(tài))測(cè)量參數(shù)矩陣數(shù)組。
目前的傳感器融合感知技術(shù)存在的挑戰(zhàn),正如埃隆馬斯克所說的:“激光雷達(dá)和雷達(dá)與視覺結(jié)合所帶來的感知不一致性使得這些技術(shù)無法達(dá)到理想的效果”,昱感微的“多維像素”多模態(tài)感知方案能夠幫助大家徹底解決這個(gè)技術(shù)難題, 而且還能達(dá)到1+1>2的效果。在高分辨率寬動(dòng)態(tài)的可見光攝像頭感知基礎(chǔ)上,雷達(dá)提供目標(biāo)的距離、速度維度的精準(zhǔn)感知還可以幫助可見光攝像頭克服天氣光線的影響,攝像頭的圖像又為雷達(dá)增添了語義信息,進(jìn)一步提高雷達(dá)點(diǎn)云的置信度以及感知信息量;遠(yuǎn)紅外攝像頭有針對(duì)性的目標(biāo)熱輻射圖像感知?jiǎng)t賦予了自動(dòng)駕駛系統(tǒng)卓越的夜視能力。昱感微“多維像素”超級(jí)攝像頭就像是一雙比人眼更敏銳的眼睛,看到的不僅僅是一幅幅二維的圖像,還有更多維度的精確信息(目標(biāo)的距離/速度/3D空間位置/溫度/材質(zhì)等),形成完整的多模態(tài)“視覺語言”,令自動(dòng)駕駛系統(tǒng)可以精確全面地感知道路上各種狀況。
提升性能+降本增效,融合感知的最優(yōu)解
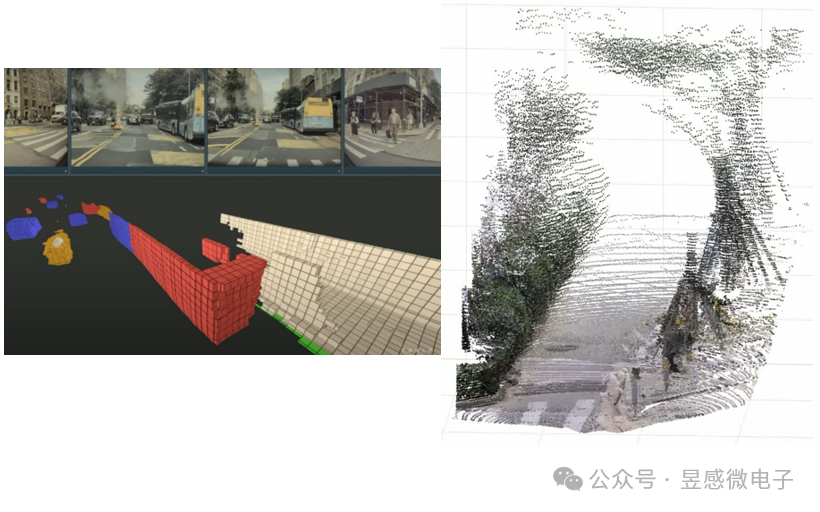
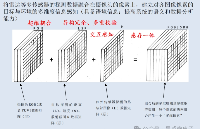
多維像素還可以直接高效支持“占用網(wǎng)絡(luò)” (Occupancy Network)算法。占用網(wǎng)格是指將感知空間劃分為一個(gè)個(gè)立體網(wǎng)格(體素),通過檢測(cè)網(wǎng)格空間是否被占用來完成3D空間場(chǎng)景的語義表征(包括探測(cè)到各類異形物體)——這也是特斯拉等車廠目前力推的視覺算法。昱感微的“多維像素”包含了目標(biāo)的圖像信息、3D空間位置信息、目標(biāo)的速度信息和材質(zhì)信息,可以直接高效實(shí)時(shí)支持占用網(wǎng)格中的體素算法。并且,昱感微目前已經(jīng)可以提供的產(chǎn)品的空間感知分辨率(右下圖)的精準(zhǔn)度遠(yuǎn)高于特斯拉公開方案中的體素顆粒度(左下圖)。
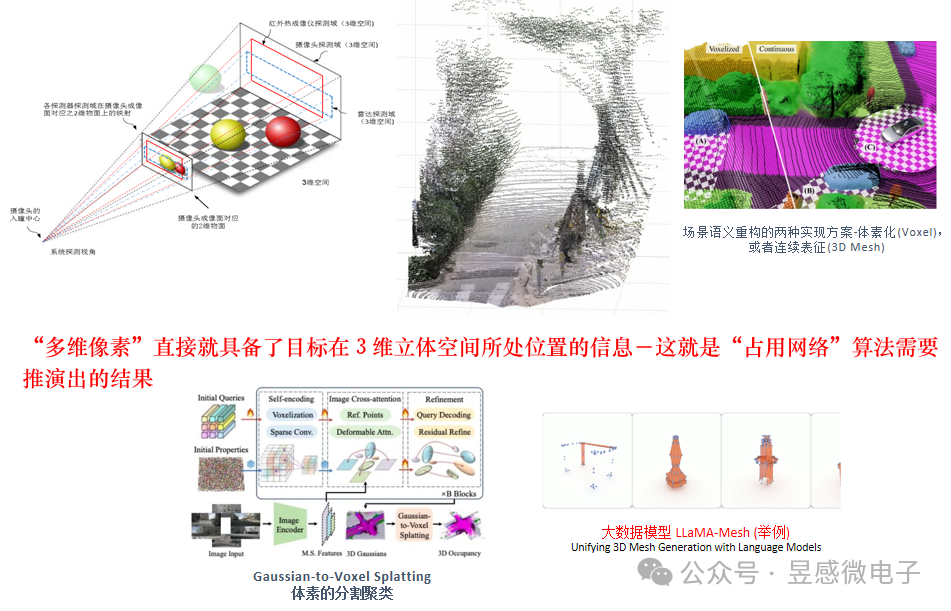
基于“多維像素”感知數(shù)據(jù)來做場(chǎng)景語義重構(gòu)(體素Voxel,或者,立體連續(xù)表征3D Mesh),然后支持大數(shù)據(jù)模型,是最精準(zhǔn)高效并節(jié)省算力的實(shí)現(xiàn)方法。
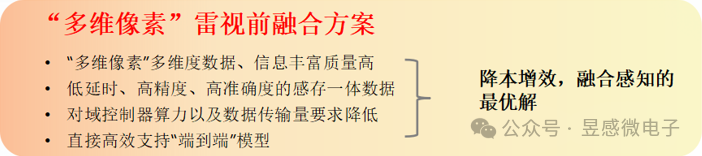
昱感微“多維像素”超級(jí)攝像頭方案實(shí)時(shí)輸出豐富高質(zhì)量的多維度感知數(shù)據(jù),其對(duì)目標(biāo)與環(huán)境的3D物理空間感知與定位精度可以達(dá)到圖像像素級(jí)的精度,多模態(tài)感知精度大幅優(yōu)于人類視覺;此外,得益于“多維像素”包含的豐富高效的感知數(shù)據(jù)在輸出時(shí)就已經(jīng)完成了全部目標(biāo)感知數(shù)據(jù)(對(duì)應(yīng)圖像像素)的確認(rèn)與精準(zhǔn)定位,“多維像素”超級(jí)攝像頭方案可大幅降低系統(tǒng)對(duì)域控制器算力的要求,并且還能夠高效支持“端到端”感知系統(tǒng)以及生成式驗(yàn)證系統(tǒng)(高效支撐數(shù)字化場(chǎng)景重構(gòu))。“多維像素”數(shù)據(jù)的組合格式在不降低感知有效信息量的前提下大幅降低了數(shù)據(jù)體量,傳感器感知端側(cè)的感知數(shù)據(jù)傳輸?shù)街醒胗蚩囟说?strong>系統(tǒng)傳輸成本也可以進(jìn)一步降低。總體來看,昱感微“多維像素”超級(jí)攝像頭方案可為客戶提升性能、降本增效,是融合感知的最優(yōu)解。
審核編輯 黃宇
-
攝像頭
+關(guān)注
關(guān)注
61文章
4968瀏覽量
98149 -
AI
+關(guān)注
關(guān)注
88文章
34917瀏覽量
278093
發(fā)布評(píng)論請(qǐng)先 登錄
從安防到元宇宙:RK3588如何重塑視覺感知邊界?
使用RTSP攝像頭執(zhí)行多攝像頭多目標(biāo)Python演示,缺少輸出幀是怎么回事?
米爾瑞芯微RK3576實(shí)測(cè)輕松搞定三屏八攝像頭
昱感微創(chuàng)始人&CEO蔣宏受邀出席“聚焦多模態(tài)雷視融合感知技術(shù)”學(xué)術(shù)沙龍,共探AI機(jī)器視覺未來
“多維像素”多模態(tài)雷視融合技術(shù)構(gòu)建自動(dòng)駕駛超級(jí)感知能力 上海昱感微電子創(chuàng)始人蔣宏GADS演講預(yù)告
多光譜火焰檢測(cè)攝像頭

昱感微爭(zhēng)得首屆供應(yīng)鏈技術(shù)解決方案賽榜首,榮獲車路云一體化智鏈先鋒獎(jiǎng)!

YGW-L2產(chǎn)品簡(jiǎn)介20241202V02


感知融合為自動(dòng)駕駛與機(jī)器視覺解開當(dāng)前無解場(chǎng)景之困
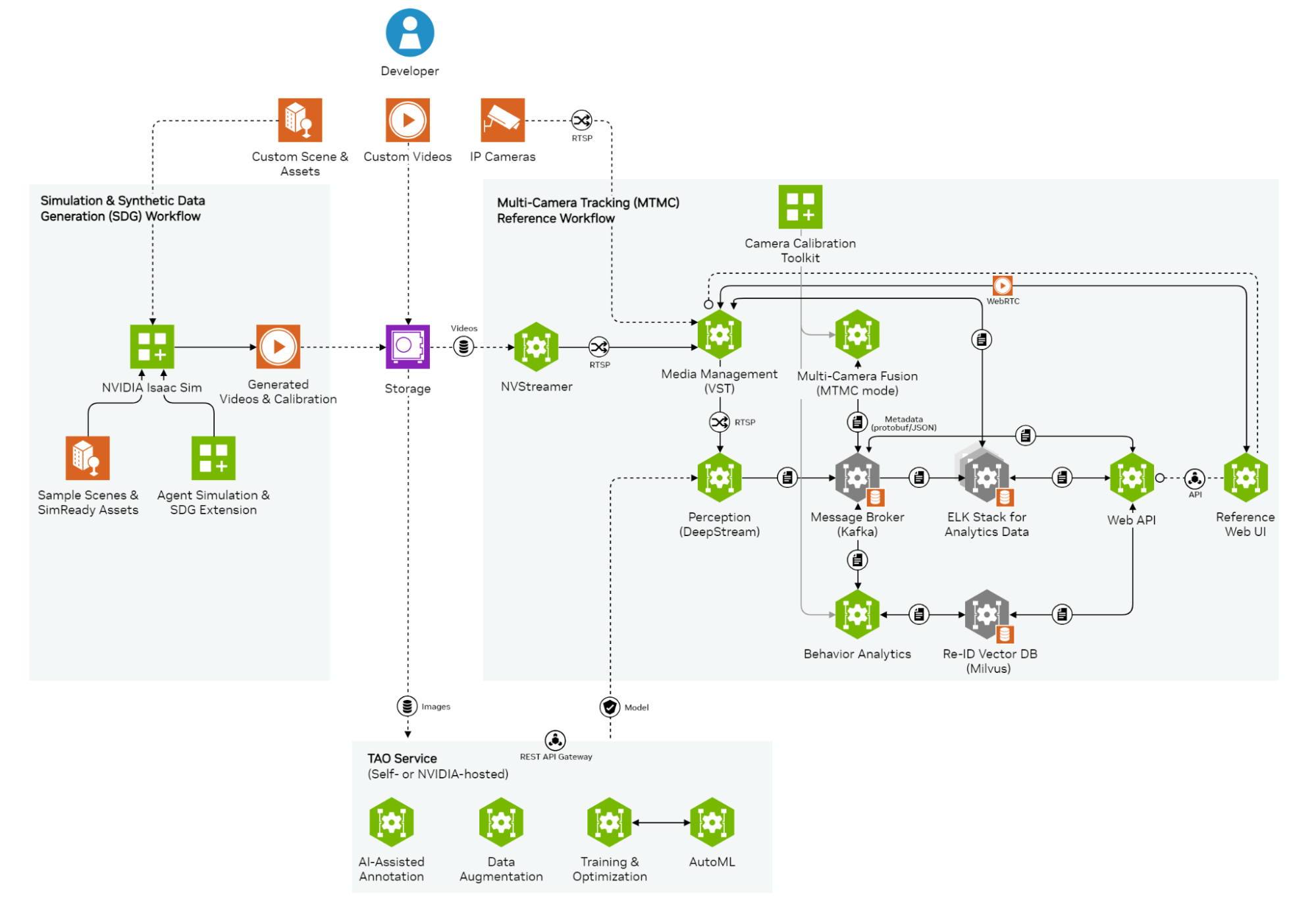
NVIDIA多攝像頭追蹤工作流的應(yīng)用架構(gòu)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論