") CAERI風(fēng)洞:整車環(huán)境風(fēng)洞風(fēng)雨場探究
CAERI風(fēng)洞:整車環(huán)境風(fēng)洞風(fēng)雨場探究

中國汽研風(fēng)洞中心自2023年成立汽車先進(jìn)水管理創(chuàng)新工作室,致力于開展汽車水管理領(lǐng)域前沿科技研究。經(jīng)過近兩年的探索發(fā)展,工作室在風(fēng)洞降雨測試技術(shù)、基于SPH方法的復(fù)雜流體仿真技術(shù)等方面取得階段性成果。下面將以分期分享的形式,對相關(guān)成果進(jìn)行詳細(xì)介紹。
一、概述
試驗(yàn)模擬技術(shù)中,風(fēng)雨場是一種模擬自然風(fēng)雨環(huán)境的試驗(yàn)裝置、場景,它結(jié)合了風(fēng)洞技術(shù)和噴雨裝置,可同時(shí)產(chǎn)生風(fēng)速和降雨效果[1]。驗(yàn)證車輛在雨天時(shí)的雨污防護(hù)性能和車窗視野性能等試驗(yàn)場景中,降雨噴頭會均勻布置在風(fēng)洞出口處,水速方向和風(fēng)向平行,以獲得更加均勻的風(fēng)雨場。目前,汽車風(fēng)洞中普遍使用“噴雨”機(jī)構(gòu)布置方式,但是此布置方式與自然降雨環(huán)境差異較大,難以憑借水文和水力特征定義降雨強(qiáng)度特征。因此,對應(yīng)雨滴與測試對象之間的相對速度,以及雨滴速度分布均勻性成為特別關(guān)注的因素。
為了對環(huán)境風(fēng)洞試驗(yàn)室中的“噴雨”機(jī)構(gòu)的建設(shè)和優(yōu)化提供參考,中國汽研通過采用PIV(粒子圖像測速)技術(shù),對噴雨式風(fēng)雨速度場進(jìn)行了精密測量,精確捕捉了環(huán)境風(fēng)洞內(nèi)雨滴粒子隨氣流運(yùn)動(dòng)的速度變化與空間分布特征。
二、中國汽研環(huán)境風(fēng)洞試驗(yàn)室
中國汽研環(huán)境風(fēng)洞試驗(yàn)室為3/4開口式回流風(fēng)洞,試驗(yàn)段長寬高分別為:18 m×13 m×8 m,風(fēng)洞內(nèi)來流速度0~200 kph可調(diào),湍流強(qiáng)度≤1.5%。為實(shí)現(xiàn)逼真的“噴雨”模擬效果,試驗(yàn)室優(yōu)化了原有降雨格柵結(jié)構(gòu),集成了72套快插型實(shí)心錐噴霧噴嘴,在標(biāo)準(zhǔn)驅(qū)動(dòng)水壓下,能夠穩(wěn)定地生成120°的實(shí)心水錐面,從而精準(zhǔn)模擬降雨場景。
三、實(shí)驗(yàn)裝置
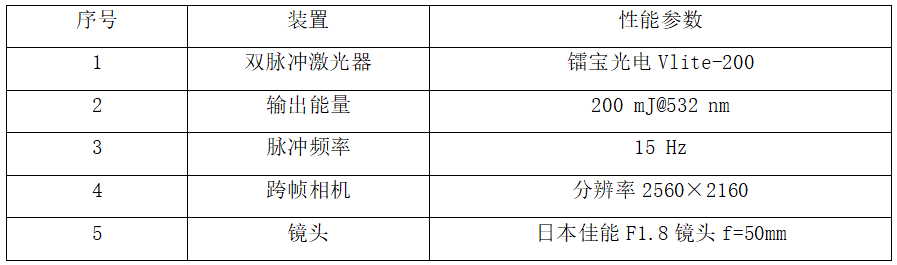
本次實(shí)驗(yàn)采用PIV測量系統(tǒng)由200 mj雙腔雙脈沖激光器,激光器片光源,PCO edge 5.5M跨幀相機(jī),分辨率2560×2160,時(shí)序同步器及PIVview等相關(guān)配套軟件構(gòu)成,配置參數(shù)如表1所示。
表1PIV系統(tǒng)配置
四、工況設(shè)置
在風(fēng)洞實(shí)驗(yàn)室中主要通過噴射氣流的帶動(dòng)作用形成風(fēng)雨場環(huán)境,車輛保持靜止?fàn)顟B(tài),通過調(diào)整來流速度來復(fù)現(xiàn)不同車輛行駛狀態(tài)。為全面探究風(fēng)洞常規(guī)試驗(yàn)場景的風(fēng)雨場速度分布情況,本次實(shí)驗(yàn)設(shè)置風(fēng)速工況:60 kph、80 kph、100 kph、120 kph、160 kph。
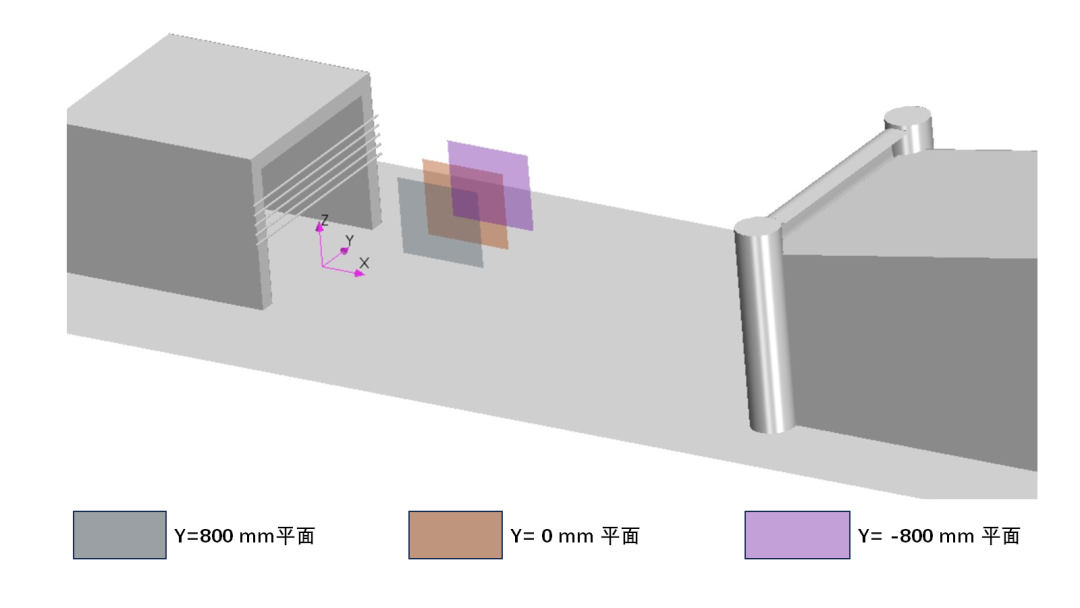
圖3 PIV測量位置示意圖
如圖3所示,PIV系統(tǒng)的圖像采集點(diǎn)布置于距離噴口X=2.2 m~3.8 m、高度Z=1 m~2.4 m的平面區(qū)域內(nèi),基本覆蓋大部分乘用車從進(jìn)氣格柵至風(fēng)窗頂端的空間區(qū)間。另外,為補(bǔ)充環(huán)境風(fēng)洞中風(fēng)雨場的空間分布數(shù)據(jù),測量過程中進(jìn)一步在Y=0 m、0.8 m、-0.8m三個(gè)特征平面上分別進(jìn)行采集測量工作。
五、試驗(yàn)結(jié)果
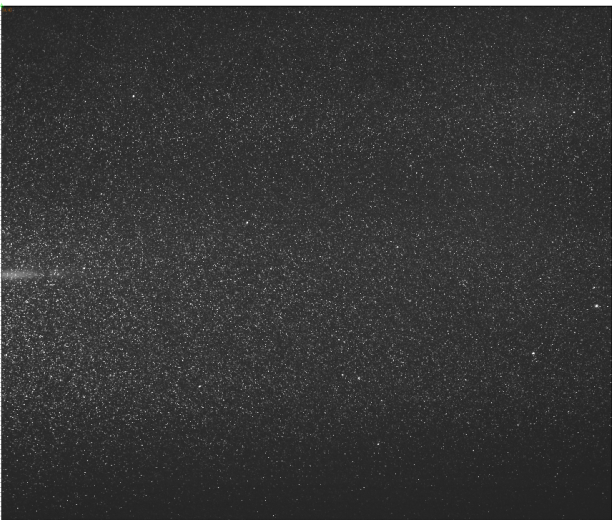
圖4 PIV拍攝的雨滴粒子運(yùn)動(dòng)圖像
試驗(yàn)測量結(jié)果在pivview軟件環(huán)境中進(jìn)行后處理計(jì)算流程,實(shí)現(xiàn)了判讀區(qū)域設(shè)置、FFT互相關(guān)性分析、后處理優(yōu)化、數(shù)據(jù)輸出等處理步驟,相關(guān)結(jié)果如下:
5.1 雨滴粒子速度分布

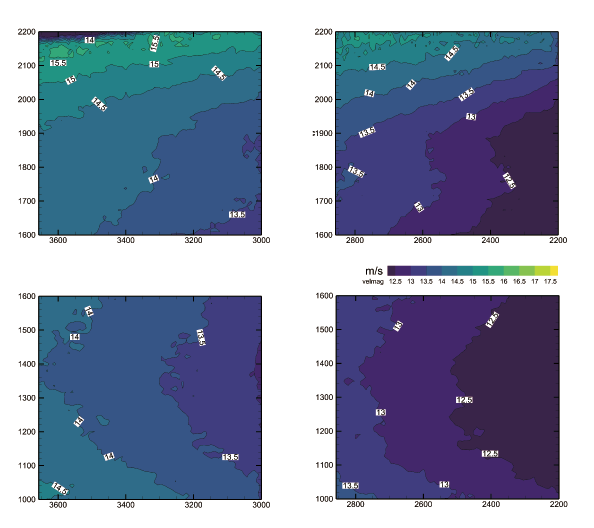
圖5 雨滴粒子速度分布場@60kph
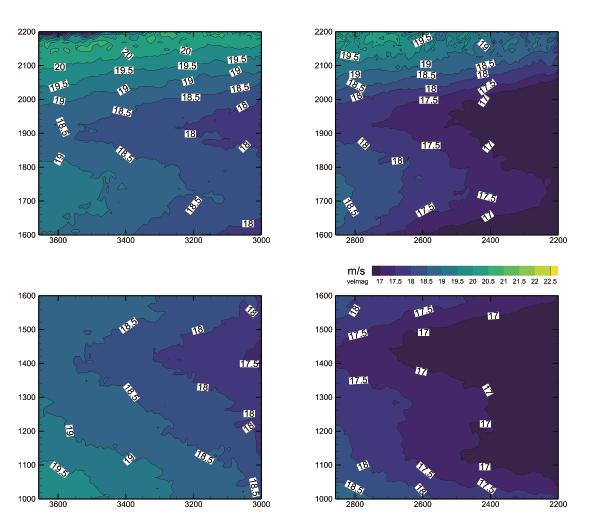
圖6 雨滴粒子速度分布場@80kph
雨滴粒子在噴射氣流的“攜帶”作用下沿X軸方向逐漸遠(yuǎn)離噴口,其運(yùn)動(dòng)速度呈現(xiàn)“漸進(jìn)式”增加趨勢。
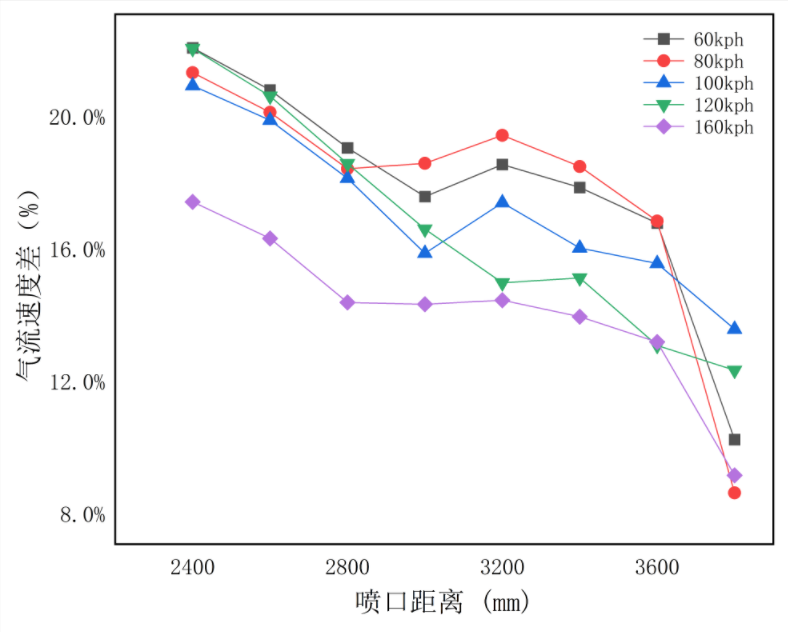
圖7 雨滴粒子與氣流速度差異分布
如圖7所示,雨滴粒子與氣流之間的速度差異顯著,但此差異隨著X軸方向上與噴口距離的增大,以及雨滴粒子持續(xù)加速,而逐漸趨于減小。
5.2 雨滴粒子速度分布均勻性分析
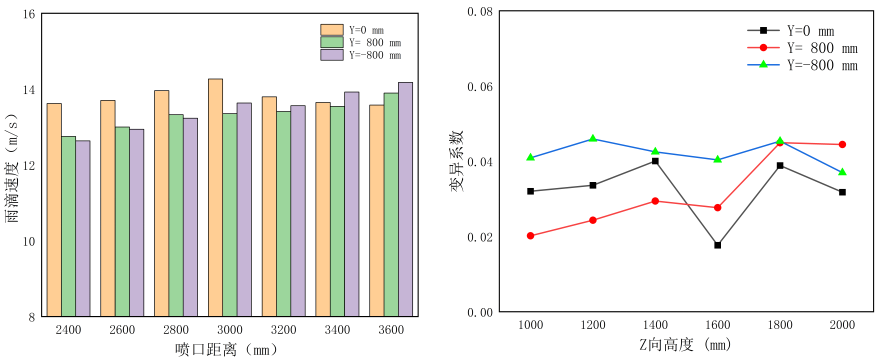
圖8雨滴粒子速度分布均勻性分析@60 kph
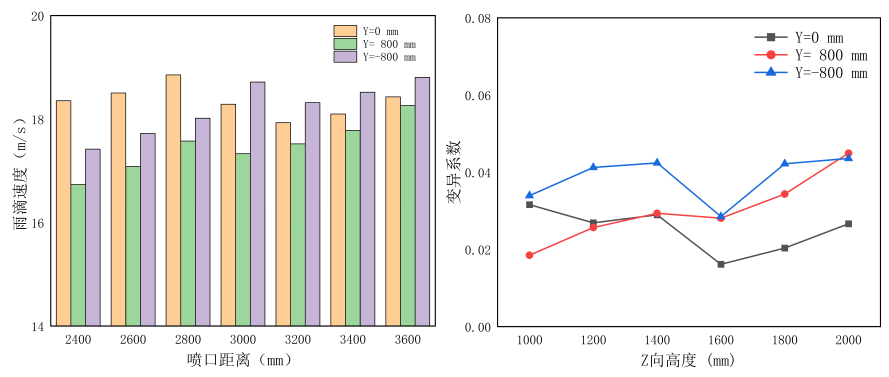
圖9雨滴粒子速度分布均勻性分析@80 kph
如圖8、9分別列出了常用工況下中各平面的速度對比情況、并引入了速度變異系數(shù)*(系數(shù)越小說明一致性越佳)作為評估指標(biāo),Y向速度分布的變異系數(shù)≤4.1%,Z向高度上雨滴粒子速度分布變異系數(shù)均小于等于5%。
*變異系數(shù)即標(biāo)準(zhǔn)差與平均值的比值,用于衡量數(shù)據(jù)離散波動(dòng)性。
六、說明
中國汽研環(huán)境風(fēng)洞試驗(yàn)室應(yīng)用PIV技術(shù)測量風(fēng)雨場速度,精確捕捉雨滴速度分布,提出了空間雨場內(nèi)速度均勻性的評估方法。根據(jù)本次測量結(jié)果,雨滴粒子越靠近X向下游位置,其速度與風(fēng)速的差異率越小(≤15%@X=3800)。同時(shí),X向下游位置雨滴粒子在Y向的速度分布也展現(xiàn)出良好的均勻性,為車輛在“噴雨”式風(fēng)雨場中的安裝設(shè)置提供了數(shù)據(jù)支撐。
同時(shí),中國汽研面相行業(yè)推出了PartoX復(fù)雜流體環(huán)境仿真軟件,采用基于新型SPH無網(wǎng)格方法的求解器,適用于任意復(fù)雜壁面和界面的流動(dòng)問題,能夠完美覆蓋整車及部件水管理開發(fā)典型場景。基于此項(xiàng)PIV測量結(jié)果,得到風(fēng)洞試驗(yàn)場景下的真實(shí)風(fēng)/雨速度場及負(fù)載、雨滴粒徑及分布結(jié)果,用于定制雨水模型、映射及修正表面張力、氣動(dòng)力負(fù)載模型等,確保仿真分析與試驗(yàn)測試結(jié)果一致性。
下期分享將展開PartoX復(fù)雜流體環(huán)境仿真軟件的涉水場景(耦合結(jié)構(gòu)強(qiáng)度)案例介紹,敬請期待!
參考文獻(xiàn)
【1】Liu Q , Liu H , Zhou Q ,et al.Numerical research on rain field intensity and uniformity of a high-velocity rain wind tunnel[J].IOP Publishing Ltd, 2024.DOI:10.1088/1742-6596/2820/1/012073
-
仿真
+關(guān)注
關(guān)注
52文章
4255瀏覽量
135598 -
測量系統(tǒng)
+關(guān)注
關(guān)注
2文章
559瀏覽量
42229 -
SPH
+關(guān)注
關(guān)注
0文章
3瀏覽量
742
原文標(biāo)題:CAERI風(fēng)洞丨整車環(huán)境風(fēng)洞風(fēng)雨場探究
文章出處:【微信號:AutoWindTunnel,微信公眾號:中國汽研汽車風(fēng)洞技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
整車測試:環(huán)境機(jī)械可靠性測試

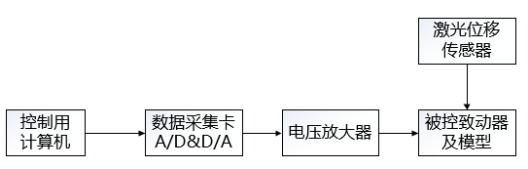
安泰電壓放大器在可變形機(jī)翼縮比模型主動(dòng)變形實(shí)驗(yàn)中的應(yīng)用
風(fēng)雨中的堅(jiān)守者:防水連接器是否懼怕下雨天?
簡儀科技動(dòng)態(tài)天平測試解決方案
基于中國汽研風(fēng)噪標(biāo)模的風(fēng)噪共性課題征集

長城汽車如何行穩(wěn)致遠(yuǎn)
長城汽車舉辦氣動(dòng)聲學(xué)風(fēng)洞試驗(yàn)室建設(shè)協(xié)同共創(chuàng)會
一種面向飛行試驗(yàn)的數(shù)據(jù)融合框架

防水連接器的雨天宣言:風(fēng)雨無阻,連接無憂

NVIDIA發(fā)布Omniverse實(shí)時(shí)物理數(shù)字孿生產(chǎn)品
雨刮器壓力分布檢測wipe有用嗎?
超聲波風(fēng)速傳感器在什么裝置里檢定?
整車低壓電源模式介紹

整車控制器VCU應(yīng)用層算法開發(fā)流程





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論