") 磁場定向控制如何優(yōu)化BLDC電機(jī)性能
磁場定向控制如何優(yōu)化BLDC電機(jī)性能

無刷直流(BLDC)電機(jī)因其高效、可靠和低維護(hù)需求而得到廣泛應(yīng)用。然而,控制這類電機(jī)面臨諸多挑戰(zhàn),尤其是在實(shí)現(xiàn)平穩(wěn)、高效運(yùn)行方面。本文將探討磁場定向控制(FOC)作為一種先進(jìn)的方法如何優(yōu)化BLDC電機(jī)性能、減少轉(zhuǎn)矩紋波并提升整體效率。
盡管BLDC電機(jī)具有諸多優(yōu)勢,但其控制的復(fù)雜性——涉及精確的電子換向和反饋機(jī)制——給設(shè)計(jì)工作帶來了巨大挑戰(zhàn)。
BLDC電機(jī)通過在定子中產(chǎn)生旋轉(zhuǎn)磁場并與轉(zhuǎn)子中的永磁體相互作用而工作。不同于傳統(tǒng)電機(jī)使用機(jī)械電刷進(jìn)行換向,BLDC電機(jī)依賴電子控制器來切換定子繞組中的電流。這種電子換相對于精確控制至關(guān)重要,但也增加了系統(tǒng)的復(fù)雜性。
電氣驅(qū)動(dòng)相對復(fù)雜,通常需要高頻率的三相120度相位差交流電,并利用脈寬調(diào)制(PWM)來產(chǎn)生所需的轉(zhuǎn)速和轉(zhuǎn)矩。
BLDC電機(jī)在可控性、效率及重量方面的潛力,推動(dòng)了新型集成驅(qū)動(dòng)解決方案的開發(fā);這些解決方案已應(yīng)用于從工業(yè)到家用電器等多個(gè)市場,以及無人機(jī)和電動(dòng)自行車等新興領(lǐng)域。
BLDC電機(jī)基礎(chǔ)知識(shí)
最簡單的BLDC電機(jī)控制方式是六步或梯形波驅(qū)動(dòng);其中三個(gè)定子繞組按固定順序依次通電。盡管這種方法易于實(shí)現(xiàn),但由于轉(zhuǎn)子和定子磁場的非理想對齊,會(huì)導(dǎo)致轉(zhuǎn)矩紋波的產(chǎn)生。理想的解決方案是使用正弦波驅(qū)動(dòng)方式以產(chǎn)生平滑的旋轉(zhuǎn)磁場,使其始終與轉(zhuǎn)子完美對齊。然而,實(shí)現(xiàn)這一點(diǎn)需要復(fù)雜的控制算法和準(zhǔn)確的轉(zhuǎn)子位置反饋。
轉(zhuǎn)子所受的力并非始終處于期望的切線方向——隨著電機(jī)旋轉(zhuǎn),會(huì)存在周期性的徑向分量。這不僅不會(huì)產(chǎn)生軸轉(zhuǎn)矩,反而只會(huì)降低效率、造成發(fā)熱,并導(dǎo)致所謂的“轉(zhuǎn)矩紋波”(圖1,左)。這種簡單的驅(qū)動(dòng)被稱為六步或“梯形波”。理想情況下,應(yīng)使用正弦波而非通過通斷驅(qū)動(dòng)來激勵(lì)繞組(圖1,右),以使定子線圈產(chǎn)生平滑旋轉(zhuǎn)的磁場,然后控制交流勵(lì)磁電流,使得由此產(chǎn)生的磁場角度始終垂直于轉(zhuǎn)子磁鐵的磁場。
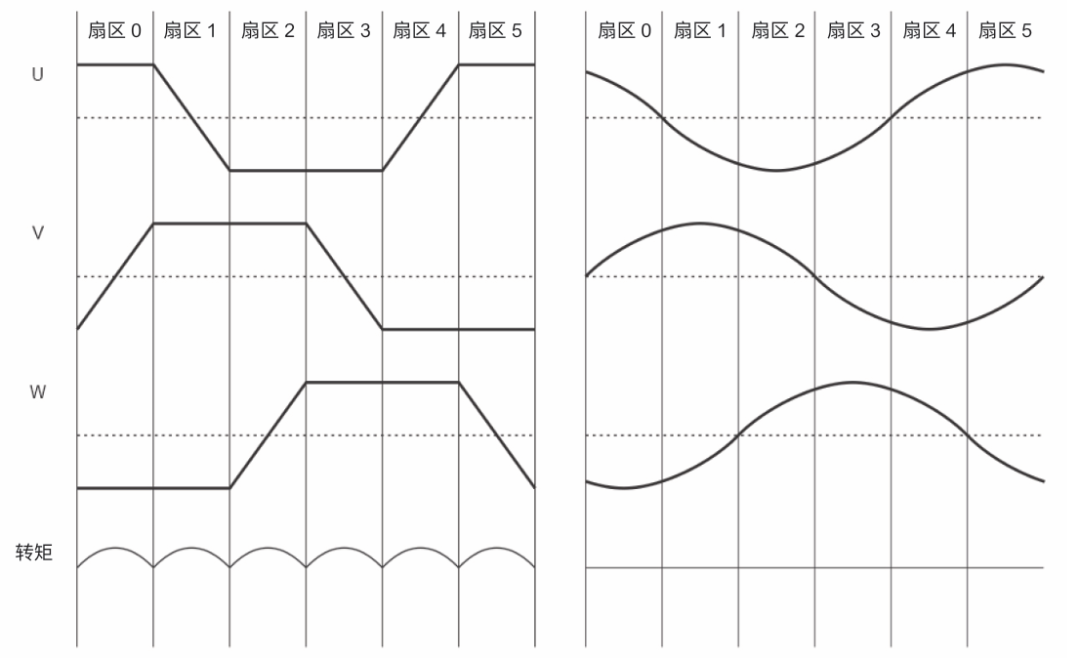
圖1,BLDC電機(jī)的六步梯形波驅(qū)動(dòng)與正弦波驅(qū)動(dòng)波形對比
這樣可以通過360度旋轉(zhuǎn)獲得最大切向力和轉(zhuǎn)矩,從而實(shí)現(xiàn)最小的轉(zhuǎn)矩紋波和最高的效率。為達(dá)成這一目標(biāo),不僅須精確確定轉(zhuǎn)子的角位置,同時(shí)還必須控制定子電流,因?yàn)檫@決定了在任意時(shí)刻,由三個(gè)繞組共同作用所產(chǎn)生磁場的強(qiáng)度與方向。圖2給出了一個(gè)示例——當(dāng)轉(zhuǎn)子處于該位置,且磁場方向?yàn)镹-S時(shí),如果定子磁場方向與灰色雙箭頭方向一致,即呈90度角,則磁體將獲得最大轉(zhuǎn)矩。這種情況發(fā)生在W和V繞組產(chǎn)生的磁場在某一極性下相等,而U繞組產(chǎn)生的磁場在相反極性下達(dá)到最大值之時(shí);對應(yīng)于驅(qū)動(dòng)電流波形中的 A-B位置。
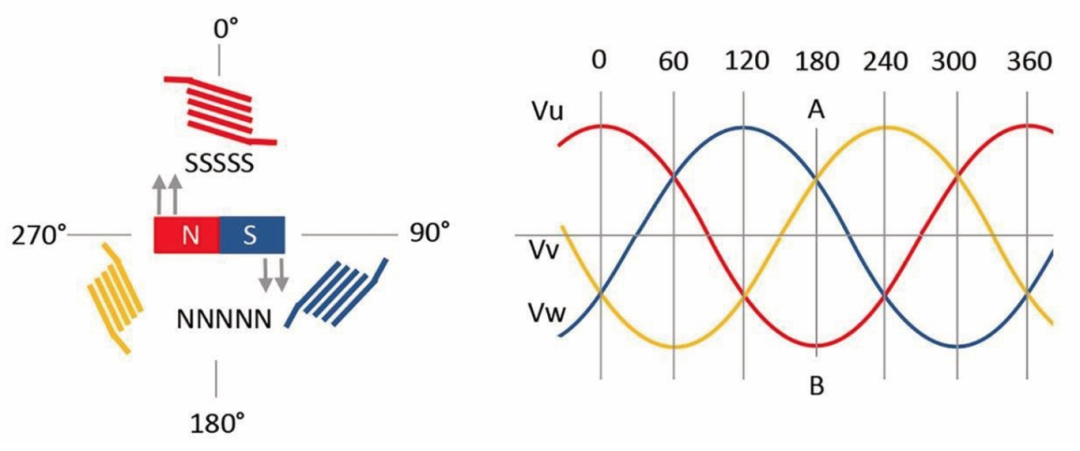
圖2,轉(zhuǎn)子轉(zhuǎn)矩應(yīng)為切向,以發(fā)揮最大效果
僅僅在正確的相位上對三個(gè)繞組施加和控制正弦電壓并不能實(shí)現(xiàn)精確控制,因?yàn)槔@組電感、反電動(dòng)勢和其它效應(yīng)會(huì)導(dǎo)致電流及磁場發(fā)生相移。這正是磁場定向控制(FOC)的作用所在;它通過優(yōu)化繞組電流來動(dòng)態(tài)校正定子磁場的幅度與方向,以匹配實(shí)時(shí)測量的轉(zhuǎn)子位置。
利用磁場定向控制優(yōu)化轉(zhuǎn)矩
FOC通過將三相定子電流轉(zhuǎn)換為兩個(gè)正交分量來工作:一個(gè)代表產(chǎn)生轉(zhuǎn)矩的分量(IQ),另一個(gè)代表磁化分量(ID)。這兩個(gè)分量可以獨(dú)立控制,以實(shí)現(xiàn)所需的電機(jī)性能。
FOC涉及多個(gè)數(shù)學(xué)變換。首先,“克拉克(Clarke)”變換將三相電流轉(zhuǎn)換為兩軸系統(tǒng)(Iα和Iβ)。然后, “帕克(Park)”變換將這些軸旋轉(zhuǎn),與轉(zhuǎn)子位置對齊,得到直軸分量(ID)和正交分量(IQ)電流。通過控制這些電流,F(xiàn)OC在整個(gè)電機(jī)運(yùn)行過程中保持最佳轉(zhuǎn)矩輸出。
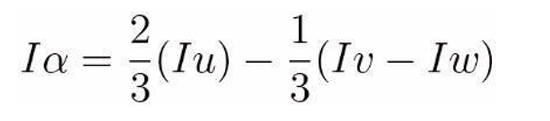
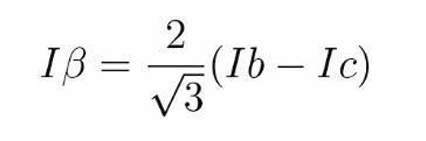
定子繞組電流以及由此產(chǎn)生的磁場強(qiáng)度和方向可以在一個(gè)共同的靜態(tài)坐標(biāo)系中表示為三個(gè)相隔120度的旋轉(zhuǎn)矢量。如果電流IU、IV和IW始終保持平衡,總和為零,則可以通過“克拉克”變換將其簡化為兩個(gè)在靜態(tài)框架中相隔90度的旋轉(zhuǎn)矢量,即幅度為Iα和Iβ的矢量:
接下來,需要將這些轉(zhuǎn)換為在旋轉(zhuǎn)參考平面上的靜態(tài)矢量ID(直軸分量)和IQ(正交分量),以便將其與轉(zhuǎn)子旋轉(zhuǎn)時(shí)的位置相關(guān)聯(lián)。我們通過“帕克”變換實(shí)現(xiàn)這一點(diǎn),其中θ為轉(zhuǎn)子相對于靜態(tài)Iα和Iβ框架的角度:

在穩(wěn)態(tài)條件下,ID和IQ為恒定值,可分別解釋為定子繞組電流中表示切向轉(zhuǎn)矩和不需要的徑向轉(zhuǎn)矩分量。這些值現(xiàn)在可以作為反饋環(huán)的輸入,通常使用比例積分(PI)控制器來工作,以最大化IQ并最小化ID至零。由此產(chǎn)生的誤差放大器輸出VD和VQ經(jīng)過反向帕克變換及反向克拉克變換,隨后進(jìn)行脈寬調(diào)制,以驅(qū)動(dòng)功率級,生成三個(gè)正弦波定子繞組電流。PI控制器中的可編程增益值Kp和Ki需要分別針對瞬態(tài)響應(yīng)和穩(wěn)態(tài)精度進(jìn)行優(yōu)化,并且很大程度上取決于實(shí)際的電機(jī)參數(shù),特別是繞組電阻和電感。然而,Qorvo等公司提供的高級FOC控制器具有自動(dòng)調(diào)諧功能,能夠“學(xué)習(xí)”所連接電機(jī)的特性。使用FOC的BLDC電機(jī)控制器的框圖如圖3所示。
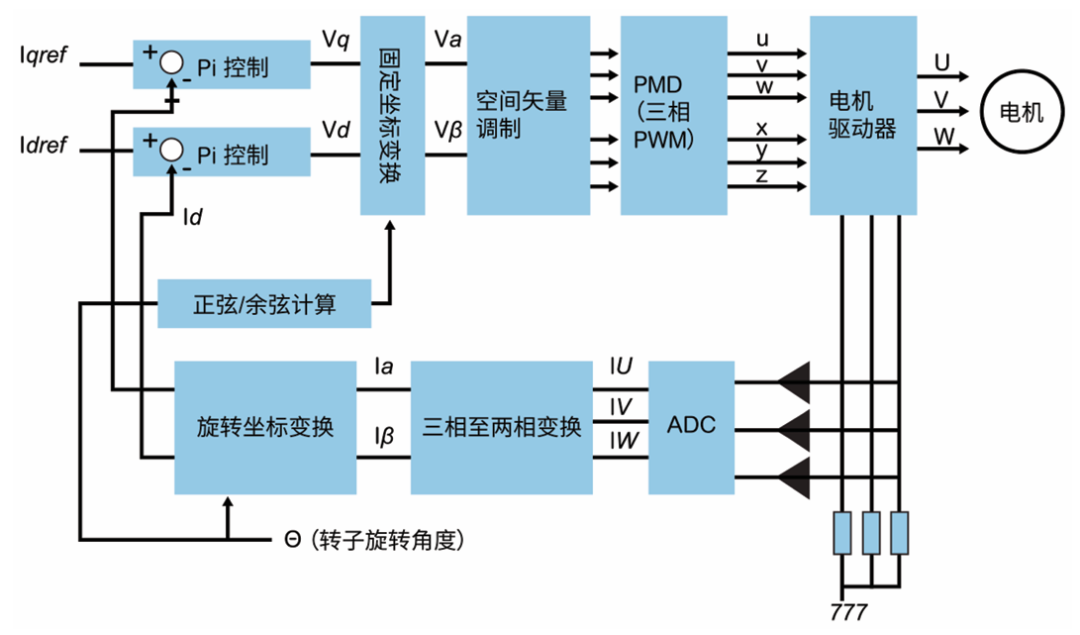
圖3,使用磁場定向控制(FOC)的典型BLDC電機(jī)控制器
從FOC中獲益最多的應(yīng)用包括那些要求噪音和振動(dòng)最小、諧波含量最低以及能夠以高于額定轉(zhuǎn)速運(yùn)行的應(yīng)用。在FOC中,這通過一種稱為“磁場削弱”的技術(shù)來實(shí)現(xiàn),即減小ID電流至負(fù)值來有意降低反電動(dòng)勢。這就削減了轉(zhuǎn)子有效磁場,從而允許更高的速度,但以犧牲轉(zhuǎn)矩為代價(jià)。
測量轉(zhuǎn)子位置和定子繞組電流
FOC的關(guān)鍵在于準(zhǔn)確確定轉(zhuǎn)子的位置,可以通過使用霍爾效應(yīng)傳感器或旋轉(zhuǎn)編碼器等傳感器來實(shí)現(xiàn)。在無傳感器設(shè)計(jì)中,轉(zhuǎn)子位置是基于反電動(dòng)勢信號進(jìn)行估算的,但這種方法精度較低,需要復(fù)雜的算法。
高性能FOC依賴于對轉(zhuǎn)子角位置和定子繞組電流的精確測量。轉(zhuǎn)子角位置可以通過多種方式來確定。在使用梯形波驅(qū)動(dòng)時(shí),當(dāng)一個(gè)繞組斷電時(shí),可以利用反電動(dòng)勢的過零點(diǎn)來指示角位置;這種方法成本低且精度高。然而在FOC中,所有繞組都持續(xù)通電驅(qū)動(dòng),因此需要采用其它方法。一種“無傳感器”技術(shù)通過繞組電流、電壓和電機(jī)特性模型來推斷位置,但這種方法在高負(fù)載下不易啟動(dòng),并且需要控制器提供強(qiáng)大的處理能力。另一種途徑是先從梯形波驅(qū)動(dòng)開始,感應(yīng)反電動(dòng)勢,然后在電機(jī)開始旋轉(zhuǎn)后切換到正弦FOC。對于基于傳感器的解決方案,霍爾傳感器通過簡單的接口解決了這個(gè)問題,允許在高負(fù)載條件下啟動(dòng)并實(shí)現(xiàn)更精確的轉(zhuǎn)矩控制。另一種確定位置測量的方法是利用具有正交輸出的磁解析器或編碼器,這是一種較昂貴但精度極高的解決方案,同時(shí)還能感應(yīng)旋轉(zhuǎn)方向。
繞組電流的測量也可以通過不同的方式進(jìn)行。最準(zhǔn)確的方法是利用電阻感測和三個(gè)ADC同時(shí)采樣三個(gè)繞組電流。
然而,采樣的時(shí)點(diǎn)至關(guān)重要,以避免受到嘈雜的PWM開關(guān)邊沿的影響。為獲得最佳精度,可將電阻直接串聯(lián)在繞組上;但由于測得的電壓沒有接地參考,且存在高共模波形電平,處理起來較為困難,因此更好的解決方案是測量逆變器支路電流(圖4左側(cè))。對于成本敏感型應(yīng)用,可以使用單個(gè)分流電阻,因?yàn)樗梢杂行У販y量直流鏈路電流(圖4右側(cè))。單分流方法僅需要一個(gè)ADC,但該技術(shù)存在局限性――如果活動(dòng)矢量持續(xù)時(shí)間小于最小測量時(shí)間,則電流測量將不準(zhǔn)確。為了糾正這一點(diǎn),可能需要采用“非對稱”電流采樣來提供更好的信號質(zhì)量。
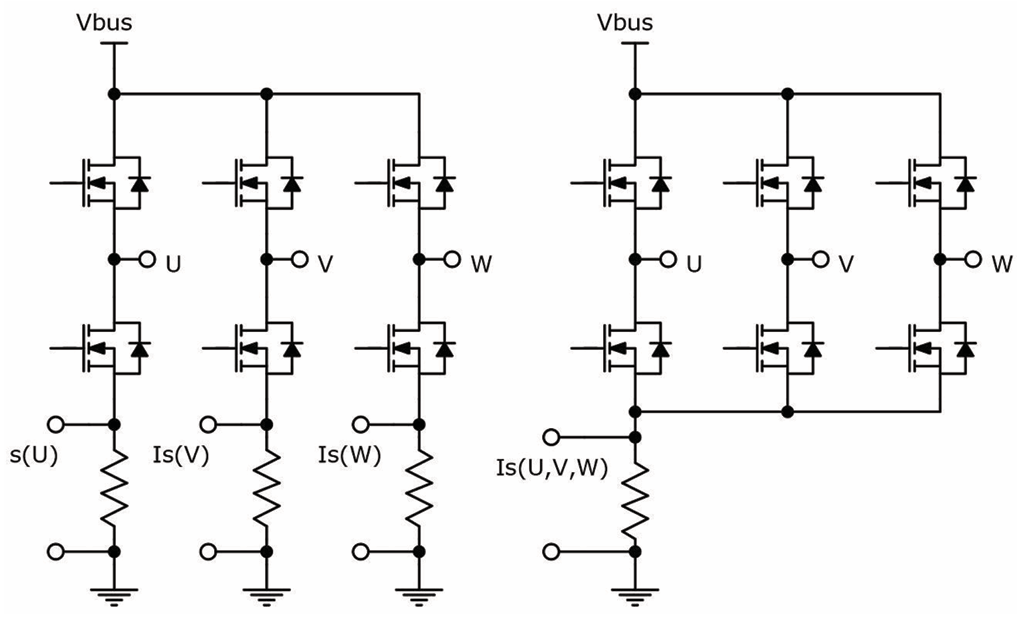
圖4,BLDC 電機(jī)電流監(jiān)測方法;
左側(cè)為三分流法,右側(cè)為單分流法
實(shí)施FOC的關(guān)鍵在于精準(zhǔn)調(diào)控電機(jī)定子電流,而繞組的電感特性與反電動(dòng)勢等因素則增加了這一過程的挑戰(zhàn)性。Qorvo推出的PAC5xxx系列等現(xiàn)代集成電路將所有必要功能集成到單一芯片中,以簡化這一過程。該系列IC不僅提供自動(dòng)調(diào)諧、無傳感器操作,還擁有全面的診斷功能,從而使FOC技術(shù)變得更加易于應(yīng)用,并適用于更廣泛的領(lǐng)域。
除了基本的電機(jī)控制功能外,這些先進(jìn)的控制器還支持如磁場削弱等高級功能;該功能允許電機(jī)通過降低轉(zhuǎn)子磁場強(qiáng)度而超越其基礎(chǔ)速度運(yùn)行。這在電動(dòng)汽車或工業(yè)機(jī)械等需要較寬轉(zhuǎn)速范圍的應(yīng)用中尤為有用。
所有用于BLDC電機(jī)的梯形波控制或磁場定向控制功能均可集成至單芯片控制器中;典型產(chǎn)品如Qorvo基于ARM@ Cortex處理器架構(gòu)的PAC5xxx系列控制器。這些器件高度可配置,適用于最高達(dá)3kHz的電氣轉(zhuǎn)速。
控制模式包括轉(zhuǎn)矩、速度和功率,同時(shí)擁有無傳感器、霍爾傳感器或正交編碼器位置感測選項(xiàng),并可使用單分流或三分流電流感測。為確保順利啟動(dòng),控制器還包含梯形波/FOC混合模式,并具有自動(dòng)調(diào)諧功能,可識(shí)別電機(jī)參數(shù)以實(shí)現(xiàn)最佳性能。控制器支持磁場削弱,并提供如欠壓、過溫、堵轉(zhuǎn)和開相檢測等多種保護(hù)特性;所有問題均由板載診斷功能報(bào)告。其中一個(gè)版本甚至包括適用于低功耗應(yīng)用(如手持設(shè)備和工具)的電機(jī)驅(qū)動(dòng)MOSFET。各項(xiàng)功能均可借助圖形用戶界面(GUI)進(jìn)行配置,并通過參考固件、應(yīng)用筆記、編程指南、軟件開發(fā)套件和硬件評估套件帶來全面支持。
FOC特別適用于對精度、效率和平穩(wěn)運(yùn)行要求極高的應(yīng)用;包括電動(dòng)汽車以及工業(yè)自動(dòng)化領(lǐng)域――對于前者,平穩(wěn)的轉(zhuǎn)矩傳遞對于舒適性和性能至關(guān)重要;對于后者,能源效率和可靠性則是關(guān)鍵考量。此外,在家用電器中使用FOC也有助于滿足嚴(yán)格的能效標(biāo)準(zhǔn),同時(shí)保持性能水平。
結(jié)論
磁場定向控制(FOC)為優(yōu)化BLDC電機(jī)性能提供了一種先進(jìn)的解決方案,可實(shí)現(xiàn)更高的效率、更小的轉(zhuǎn)矩紋波,和更高的控制精度。隨著集成解決方案變得越來越先進(jìn)且成本效益更高,F(xiàn)OC有望成為各種應(yīng)用中BLDC電機(jī)控制的標(biāo)準(zhǔn)。
-
無刷直流電機(jī)
+關(guān)注
關(guān)注
61文章
700瀏覽量
47529 -
BLDC電機(jī)
+關(guān)注
關(guān)注
7文章
221瀏覽量
21995 -
磁場定向控制
+關(guān)注
關(guān)注
0文章
16瀏覽量
10556 -
Qorvo
+關(guān)注
關(guān)注
17文章
694瀏覽量
78394
原文標(biāo)題:面向無刷直流電機(jī)的磁場定向控制
文章出處:【微信號:Qorvo_Inc,微信公眾號:Qorvo半導(dǎo)體】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
多BLDC電機(jī)磁場定向控制策略及解決方案
無傳感器磁場定向控制
異步電機(jī)磁場定向控制MATLAB/Simulink建模感應(yīng)

用磁場定向控制提高電機(jī)性能

如何實(shí)現(xiàn)永磁電機(jī)的磁場定向控制
TI 推出無需編程無傳感器磁場定向控制和梯形控制的 70W BLDC 電機(jī)驅(qū)動(dòng)器 可節(jié)省數(shù)周系統(tǒng)設(shè)計(jì)時(shí)間

永磁同步電機(jī)磁場定向控制轉(zhuǎn)速環(huán)PI調(diào)節(jié)器參數(shù)整定
使用TI智能柵極驅(qū)動(dòng)器輕松實(shí)現(xiàn)無刷直流(BLDC)電機(jī)的磁場定向控制(FOC)
FOC電機(jī)與BLDC電機(jī)的比較
使用旋轉(zhuǎn)電感式位置傳感器的三相BLDC電機(jī)的磁場定向控制(FOC)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論