 蘇州大學院士團隊MEMS傳感器最新綜述:機器人感知技術研究現狀與發展趨勢
蘇州大學院士團隊MEMS傳感器最新綜述:機器人感知技術研究現狀與發展趨勢

近年來,機器人領域發展持續火熱,作為機器人重要感知源頭,相關傳感器賽道亦備受關注。本論文來自《智能感知工程》,主要探討了MEMS傳感器在機器人領域的應用和發展趨勢,涉及MEMS 測距傳感器 、MEMS 慣性傳感器、MEMS 力/觸覺傳感器、MEMS 嗅覺傳感器等多種器件。 本論文第一作者劉會聰教授長期從事微納米器件與系統研究工作,研究領域包括微能源器件與自供電傳感系統、柔性電子皮膚、智能感知與人機交互等,擔任中國儀器儀表學會微納器件與系統技術分會理事會理事兼副秘書長等職務。論文通訊作者孫立寧教授是微納器件與系統及微納機器人專家,俄羅斯工程院外籍院士。 限于公眾號內容閱讀習慣,本文在行文排版上做了調整,論文原文請點擊文末【閱讀原文】鏈接查看。本文獲《智能感知工程》授權轉載,轉載本文請聯系《智能感知工程》編輯部,未經許可轉載本文將視為侵權。 《智能感知工程》雜志創刊于2024年,由中國機械工業聯合會主管、機械工業信息研究院主辦,是智能感知領域國家級學術期刊。內容涵蓋智能感知及相關交叉領域具有創新性的基礎研究、工程應用優秀案例、國內外智能感知領域發展動向及最新研究成果與創新應用。

基于 MEMS 傳感器的機器人感知技術研究現狀與發展趨勢
劉會聰 王鳳霞 李東升 遲文政 孫立寧
(蘇州大學, 蘇州 215000)
摘要: 傳感器是機器人具備類人知覺與反應能力的基礎, 能夠輔助其實現內部反饋控制和外部環境感知。隨著傳感器技術和人工智能 (AI) 的發展, 機器人集成了更為復雜的傳感器系統, 包括視覺傳感器、 激光雷達、 慣性傳感器和力傳感器等, 能夠完成更為復雜的工作任務, 應用范圍從傳統工業領域逐漸向生活服務領域延伸。微機電系統 (Micro-Electro-Mechanical Systems, MEMS) 傳感器具有體積小、 精度高、 功耗低和成本低等優點, 且適用于極端環境, 已在機器人領域得到廣泛應用。綜述 MEMS 傳感器發展現狀, 包括測距傳感器、 慣性傳感器、 力/ 觸覺傳感器及嗅覺傳感器, 并探討其在機器人領域的應用與發展趨勢。未來, MEMS 傳感器與 AI 大模型相結合, 能夠促進具身智能機器人的創新發展與應用。
0 引言
21 世紀以來, 機器人技術經歷了從簡單機械化到高度智能化的顯著轉變和飛速發展。從最初僅能執行單一任務的機械裝置, 逐步演變為能夠感知環境、 自主決策并執行復雜任務的高度智能化系統, 這一發展歷程與傳感器技術的進步緊密相連。
20 世紀末至 21 世紀初, 大部分機器人主要應用于工業生產線, 僅能夠執行簡單的重復性任務, 功能實現主要依賴基本的傳感器, 如位置傳感器、 力傳感器和接近傳感器。通過檢測機械臂的位置和力度, 確保操作的準確性和安全性。在該階段, 傳感器的感知功能相對簡單, 機器人系統的智能化水平相對較低, 數據處理能力有限,主要依靠預設的編程邏輯執行任務。
隨著人工智能 (AI) 技術的快速發展, 機器人開始集成更為復雜的傳感器系統, 如視覺傳感器、 激光雷達和慣性傳感器等。這些傳感器能夠提供更加豐富的環境信息, 使機器人能夠執行更為復雜的任務,如物體識別、 路徑規劃和動態環境適應。
此外,機器學習和深度學習技術的引入也使得機器人能夠通過大量數據訓練實現自我學習和優化, 提高其執行復雜任務的能力。在該階段, 傳感器技術迎來了重大突破, 尤其體現在集成度和精度方面。高分辨率攝像頭、 三維視覺系統、 測距傳感器、慣性傳感器和力學傳感器的應用使得機器人能夠更加精確地感知和理解周圍環境, 極大地提升了機器人在復雜環境中的感知和決策能力, 并在自動駕駛、 智慧醫療、 人機交互等眾多應用領域中取得了突破性成果。
傳感器是機器人具備類人知覺與反應能力的基礎, 能夠輔助其實現內部反饋控制, 并與外部環境產生交互。依據檢測對象的類別不同, 傳感器可分為用于測量機器人自身狀態的內部傳感器和用于測量與機器人作業相關的外部因素的外部傳感器。依靠單一傳感器, 機器人僅能完成局部信息識別。為了獲取更加完整、 穩定的系統信息, 通常采用多源信息融合方式提高識別的準確率。
近年來, 隨著微納技術的迅猛發展, 微機電系統 (Micro-Electro-Mechanical Systems, MEMS) 傳感器成為機器人感知的核心支撐, 其重要性日益凸顯。相較傳統傳感器, MEMS 傳感器具有體積小、 精度高、 功耗低和成本低等優點, 且適用于極端環境, 應用場景較為廣泛。例如, 通過集成微型壓力傳感器和氣體傳感器, 家用機器人能夠實時監測家庭環境并自動調整工作模式。隨著人形機器人的目標應用場景從工業場景向居家場景拓展,其對力矩、 觸覺及慣導等傳感器提出更高要求。
綜上所述, 機器人智能化發展與傳感器技術的進步密不可分。從 傳 統 的 機 械 傳 感 器 到 先 進 的MEMS 傳感器, 每一次技術革新都推動了機器人性能的顯著提升, 使其在工業、 農業、 醫療等更多領域中發揮越來越重要的作用。
1 MEMS 傳感器發展現狀
MEMS 傳感器是一種集成了微型機械、 電路、傳感器及控制器的復雜系統, 具備微米甚至納米級尺寸, 在靈敏度、 響應速度、 尺寸和成本方面具有獨特優勢。MEMS 傳感器廣泛應用于壓力、溫度、 加速度、 角速度、 力、 扭矩和流量等物理量的測量, 并在汽車、 電子、 工業自動化及機器人等領域發揮著重要作用。
MEMS 傳感器的發展歷程可以追溯到 20 世紀五六十年代。隨著集成電路芯片的出現, 人們開始探索在芯片上制作微小機械結構和系統的可能性 。這種利用半導體材料制作電子與機械結構的思想為 MEMS 技術的誕生奠定了理論基礎。
1962 年, 第一個硅微壓力傳感器問世,標志著 MEMS 技術的開端。早期的 MEMS 傳感器主要包括慣性傳感器和壓力傳感器。在該時期, MEMS 技術仍處于實驗室研究階段, 并未得到廣泛應用。
20 世紀 80 年代, 隨著微加工技術的進步, 振動傳感器、 流量傳感器、 打印噴頭等被成功研發。20 世紀 90 年代, 世界首款商用MEMS 加速度計問世, 主要用于汽車氣囊觸發系統。同時, MEMS 傳感器也開始在消費電子、 醫療、 汽車等領域得到應用。
21 世紀以來, 隨著材料、 制造工藝的不斷改進, MEMS 傳感器逐漸向多樣化、 集成化和智能化方向發展, 不僅能夠應用于慣性、 壓力等傳統測量領域, 還逐步拓展到氣體傳感、 溫 / 濕度檢測和光學傳感等領域。隨著可穿戴設備等產品的興起, MEMS 技術迎來第二次大規模應用的浪潮。MEMS 傳感器開始應用于心率、 運動和睡眠監測等, 通過實時檢測人體生理參數, 實現健康監測管理。
當前, 隨著人工智能時代的到來, MEMS 技術將在車聯網、 智能家居、 智能醫療、 智慧城市及智能工廠等領域發揮重要作用。
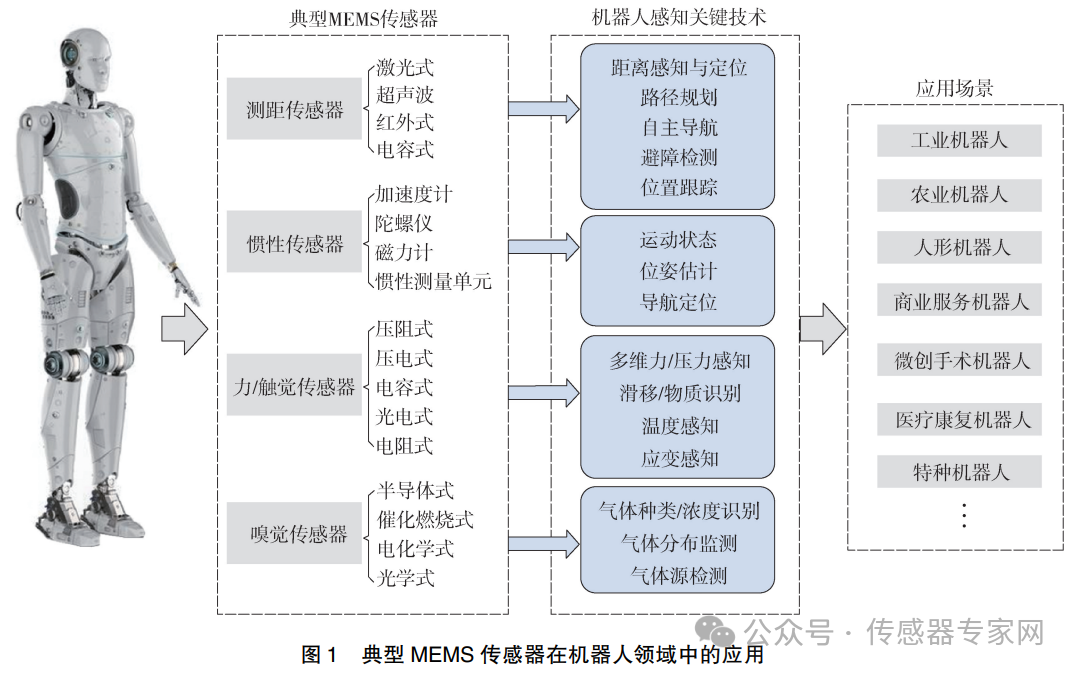
在機器人領域, MEMS 傳感器具有至關重要的作用。典型 MEMS 傳感器在機器人領域中的應用如圖 1 所示。在進行自主導航和定位時, 慣性測量單元結合了加速度計和陀螺儀, 能夠幫助機器人精確感知自身姿態和運動軌跡。此外,MEMS 傳感器可以用來實時監控機器人與地面之間的相對位置以及與障礙物的距離, 幫助機器人進行路徑規劃和避障。
對于手術機器人而言,MEMS 傳感器能夠提供精確的運動和力反饋, 幫助醫生進行微創手術操作。此外, MEMS 傳感器還被應用于機器人手臂的力反饋控制, 幫助機器人感知物體抓取施加力量, 從而實現精細化操作。
在工業自動化和制造領域, MEMS 傳感器有助于機器人更好地進行裝配、 焊接及搬運等工作, 提高了生產效率和精度。艾瑞咨詢預測結果顯示,2021—2025 年, 國內智能機器人市場年平均復合增長率將達到 40% ; 2025 年, 國內智能機器人市場規模將接近千億元, 這將帶動 MEMS 傳感器在機器人領域的應用需求量不斷增長。
2 MEMS 測距傳感器
2. 1 原理
MEMS 測距傳感器利用微型機械結構受到的變形或振動感知測量目標物體與傳感器之間的距離變化, 提升機器人的空間感知能力, 廣泛應用于機器人導航、 避障、 精密操作及虛擬交互等場景。具體而言, 當外部物體接近傳感器時, 微型機械結構會受到壓力或振動, 結合激光、 超聲波、紅外和電容等傳感技術將這種變化轉化為電信號輸出。
MEMS 傳感器能夠為機器人提供精準的距離測量、 空間感知和力反饋, 提升機器人的自動化和智能化水平, 并幫助機器人在復雜環境下實現更加靈活和精確的操作。
(1) MEMS 激光測距傳感器 (如激光雷達)。通過發射激光束到物體表面并接收反射信號, 進而計算出物體與傳感器之間的距離。常用的方法是飛行時間 (Time of Flight, ToF) 技術, 即測量激光光束從發射到接收的時間差。由于光速是已知的, 通過時間差可以準確計算出距離。MEMS激光測距傳感器通常使用微型化的激光光源和反射鏡, 可以實現高精度、 長距離的測距, 且具有較高的分辨率, 同時微型反射鏡能夠對快速運動進行高頻率掃描, 適用于動態場景。
(2) MEMS 超聲波測距傳感器。通過發射超聲波信號并接收反射波, 計算發射和接收之間的時間差進而測量與物體之間的距離。類似激光測距原理, 超聲波傳感器也使用 ToF 技術, 由于聲波傳播速度遠低于光速, 其測量范圍通常較短,且精度略低于激光傳感器。MEMS 超聲波傳感器具有較低的功耗和成本, 適用于短距離測量, 且不受光線干擾, 常用于室內機器人 (如清掃機器人、 服務機器人)、 環境監測機器人、 避障系統等短距離且精度要求較高的場景。
(3) MEMS 紅外測距傳感器。通過發射紅外光束并接收反射信號計算距離, 通常利用反射強度或 ToF 進行測距。該類傳感器具有較高的響應速度和較小的尺寸, 適用于低成本、 短距離的精確測量。相比激光和超聲波, 該類傳感器對環境的適應性更強, 但在強光干擾等某些特殊條件下可能會受到限制。該類傳感器常用于機器人避障、人機交互、 位置跟蹤等低成本、 低功耗的應用場景。
(4) MEMS 電容測距傳感器。通過測量物體與傳感器之間的電容變化計算距離。當物體靠近傳感器時會改變傳感器電極間的電場, 從而改變電容值。根據電容的變化量可以推算物體與傳感器之間的距離。該類傳感器具有較高的靈敏度和分辨率, 適用于微小距離測量, 在精密定位、 微創手術、 表面接觸檢測等領域應用廣泛。
2. 2 研究現狀
MEMS 測距傳感器在機器人領域得到廣泛應用。例如, MEMS 測距傳感器通過感知周圍環境,能夠實時測量機器人與障礙物之間的距離, 幫助機器人進行自主導航避障、 路徑規劃和環境建圖等, 廣泛應用于掃地、 物流和無人配送等場景。
在微創手術機器人中, MEMS 測距傳感器能夠在手術過程中測量手術執行器末端與目標位置的距離, 確保組織切割縫合等操作的精度。在工業機器人中, MEMS 測距傳感器可用于工件定位、 裝配過程中的精準對接等任務。
通過精確測量機器人末端執行器與工作物體的距離, MEMS 傳感器能夠提供精確的位置信息, 優化自動化生產線效率, 廣泛應用于自動化裝配、 工業搬運、倉儲和機器人視覺系統的輔助感知等。通過與視覺傳感器 (如相機、激光雷達等) 融合, MEMS 測距傳感器能夠提供更高精度的環境深度感知, 為機器人提供三維空間信息, 增強其對復雜環境的理解能力。
在虛擬現實 (VR) 和增強現實 (AR) 系統中, MEMS 測距傳感器常用于空間跟蹤與用戶交互, 通過精確測量用戶與虛擬環境的距離, 滿足更精準的虛擬場景互動需求。
當前, MEMS 激光測距傳感器常用于自主移動機器人的環境感知和障礙物檢測、 無人機導航、環境建圖與障礙物檢測, 工業機器人的精密測量和檢測及虛擬現實設備的精準環境感知。
在智能駕駛方面, MEMS 激光雷達的應用能夠實現物體的探測與規避、 識別追蹤及即時定位與地圖構建等。國內也有學者對 MEMS 激光雷達開展相關研究。霍健等針對傳統線陣激光雷達對地面目標識別 準 確 率 較 低 的 問 題, 設 計 了 一 種 基 于MEMS 激光雷達推掃呈像的點云識別算法, 實現了對車輛目標的準確識別, 識別率達 95. 9% 以上。王永杰以自動駕駛場景為基礎, 設計了一套基于 MEMS 微鏡的車載激光雷達光學掃描系統, 不僅有效減小了掃描系統的體積, 而且拓寬了掃描視場范圍。
此外, 研究人員也對 MEMS 超聲波 測 距 傳 感 器 進 行 了 相 關 研 究。例 如, Shi等基于 MEMS 超聲波測距傳感器, 實現了軟體機器人對物體的即時且準確的抓取。Tong 等基于 MEMS 超聲波測距傳感器, 設計了一種柔性超聲近距離感知皮膚并集成于機械臂表面, 極大地提高了機器人的距離感知能力, 確保了人機協作的安全性。Zhou 等研制了一種基于電容式MEMS 測距傳感器的柔性電子皮膚, 能夠檢測不同頻率和強度的電信號, 感知周圍物體引起的電場扭曲, 在無須接觸的情況下實現對物體的精準三維定位。
3 MEMS 慣性傳感器
3. 1 原理
MEMS 慣性傳感器通常由加速度計、 陀螺儀和磁力計三種主要部件組成。通過測量物體的加速度、 角速度及磁場等物理量, 提供精確的運動和定位數據。目前, 國產高性能 MEMS 慣性傳感器的核心指標能夠與國際對標, 解決了裝備應用“卡脖子” 問題。MEMS 慣性傳感器以其體積小、功耗低、 重量輕以及低成本、 易于數字化、 智能化等特點, 被廣泛應用于無人系統、 機器人導航、控制及姿態估計。
(1) 加速度計 (Accelerometer)。主要用于測量物體在不同方向上的加速度, 通過一次和二次積分獲得運動載體的速度和位移信息。采用懸浮微結構 (如質量塊或梁), 并基于電容、 壓阻或壓電式原理感知加速度。通常用于檢測物體的振動、 位移、 重力方向、 速度和位置等。
(2) 陀螺儀 (Gyroscope)。主要用于測量物體的角速度。通過微型旋轉體 (如振動梁或微型陀螺盤) 的轉動檢測該旋轉體的位移或電磁感應變化以計算角速度, 常用于測量和控制機器人的姿態 (如俯仰角、偏航角、滾轉角) 變化, 提供角速度或角度變化數據。這對于穩定機器人運動控制、 避免偏航和搖擺至關重要。
(3) 磁力計 (Magnetometer)。主要用于測量磁場強度和方向。通常基于霍爾效應、 磁阻效應測量磁場變化, 并能夠估算方位角 (機器人的朝向)。
(4) 慣性測量單元 ( Inertial Measurement Unit, IMU)。集成了加速度計、 陀螺儀和磁力計,融合三者數據精確估算機器人的位置、 速度、 姿態和角度。利用慣性導航算法 (如卡爾曼濾波、互補濾波等) 對各傳感器數據進行融合, 獲得更加穩定和準確的輸出。IMU 是機器人導航系統中的核心傳感器, 尤其是在無法使用 GPS 的環境下, IMU 可以提供連續的運動估計, 確保機器人平穩、 精準的運動, 在檢測控制、 環境感知和導航定位方面具有重要作用。
3. 2 研究現狀
MEMS 慣性傳感器在機器人領域的應用極為廣泛, 涵蓋了導航定位、 姿態控制、 精密操作等多個重要場景。通過集成加速度計、 陀螺儀和磁力計, MEMS 慣性傳感器能夠提供實時的運動狀態反饋和精確的姿態估計, 使機器人具備更高的智能化和自主化水平。
在移動機器人領域, 利用同時定位與地圖構建(Simultaneous Localization and Mapping, SLAM) 技術構建周圍環境的三維地圖, 同時實現機器人在環境圖中的位置定位, 并隨機器人的移動實現環境地圖的增量式構建與機器人的連續定位。在SLAM 技術發展早期, 以激光和視覺 SLAM 為主。隨著 MEMS 傳感器的不斷發展, 低成本、 體積小、 信息豐富的 IMU 逐漸成為研究熱點。
IMU 通過解算三個方向的線性加速度和旋轉角速率獲得載體的姿態、 速度和位移等信息, 其所提供的信息被融入視覺或激光 SLAM, 廣泛應用于清掃、物流和配送等機器人的定位和導航。結合視覺傳感器、 激光雷達等采集的外部感知數據, MEMS慣性傳感器能夠實現對加速度、 角速度的測量,幫助機器人實時估算自身位置和方向, 輔助其在室內或復雜環境中實現自主導航。
例如, 在視覺SLAM 中, 可以融合相機數據提供環境的尺度信息, 并通過運動學原理進行姿態外推, 在追蹤中可以獲得更好的初始位姿和所在位置的重力方向。而在激光 SLAM 中, 通過 IMU 的測量數據能夠為每個點云數據去除運動畸變, 提高點云的準確性。
Alteriis 等通過將 MEMS 慣性傳感器 (由 6 個不同的 IMU 組成, 每個 IMU 包含三軸陀螺儀、 加速度計及磁力計) 與 GPS 相集成, 實現無人機的精確姿態估計。Wu 等利用多個 MEMS 慣性傳感器實時獲取車輛不同部位的動態信息, 從而提高航位推測系統的性能。
在工業自動化領域, MEMS 慣性傳感器被應用于機器人搬運和裝配等場景。通過精確感知機器人末端執行器的運動狀態和姿態, 優化操作軌跡, 提高作業精度。Long 等通過機器人末端關節處的 MEMS 慣性傳感器采集各類故障模式的姿態數據, 基于混合學習算法構建智能故障診斷模型, 提升工業機器人的故障診斷能力。
在人形機器人領域, MEMS 慣性傳感器能夠監測機器人的實時狀態、 位置信息及運動軌跡,為研究其動態平衡控制及步態規劃提供理論依據,確保人形機器人完成走、 跑、 蹲等動作的姿態平衡。MEMS 慣性傳感器與其他傳感器相結合能夠實現數據互補, 如立體攝像機、 關節編碼器、力扭矩傳感器、 手部觸覺傳感器及足部接觸力傳感器等。
通過估計姿態足的質心位置、 速度、 方向、 角速率和角動量, 實現機器人狀態反饋并完成下一步動作, 主要應用于機器人的下蹲起立、前后行走、 上下樓梯和回避障礙等。在高精度運動追蹤、 康復訓練、 遙操作、 可穿戴人機交互、VR 和 AR 系統中, MEMS 慣性傳感器能夠提供重要的姿態估計和反饋信息, 輔助機器人和用戶之間完成精準動作和沉浸式交互。
Li 等利用MEMS 慣性力傳感器, 結合擴展卡爾曼濾波數據融合方法及 9 軸傳感器數據, 估算人體關節在三維空間中的空間運動軌跡。Babatain 等研制了一種基于激光誘導石墨烯和液態金屬相結合的柔性 MEMS 慣性傳感器, 并與具有運動、 溫度、 濕度和呼吸多種模式的多功能平臺深度集成, 實現多模態傳感數據的精準測量, 為未來的健康監測及機器人智能控制提供了新思路。
4 MEMS 力 / 觸覺傳感器
力/ 觸覺傳感器作為機器人的重要組成部分,能夠為機器人與環境的交互提供力/ 觸覺測量和反饋信息。通過與材料學、 MEMS、 生物仿生學和AI 技術的結合, 力/ 觸覺傳感器的靈敏度、 穩定性、 功能集成和適應性不斷提升, 被廣泛應用于精密操作、 裝配、 抓取、 微創手術、 人機交互等領域。
MEMS 力/ 觸覺傳感器能夠實現機器人對外界力的感知, 通過模擬人類皮膚的觸覺功能, 幫助機器人感知和響應外部刺激, 包括多維力、 壓力、 滑移、 材料、 紋理、 溫度及應變等。基于MEMS 技術, 機器人柔性觸覺傳感皮膚具有低模量、 高拉伸性和高耐磨性等特點, 拓展了機器人智能化應用場景, 為機器人多信息融合感知和具身智能技術發展提供了新思路。
4. 1 MEMS 力/ 力矩傳感器
多維力/ 力矩傳感器通常采用電阻應變片式彈性體作為敏感元件。當傳感器受到外力作用時, 彈性體結構會發生微小形變, 彈性體上的應變片隨之發生形變, 基于電阻-應變效應使電阻值發生變化。此時, 微小的電阻變化通過電路轉換成電壓信號,最終實現力/ 力矩測量。該類傳感器精度高、 測量范圍廣, 應用領域十分廣泛。諧振式力/ 力矩傳感器主要基于諧振頻率變化實現測量。
當傳感器的彈性體受外力作用時, 其固有頻率會發生變化, 通過測量頻率的變化量計算作用在傳感器上的力/ 力矩。該類傳感器具有高靈敏度、穩定性好和抗干擾能力強的特點。壓電式力/ 力矩傳感器是利用壓電效應原理實現力/ 力矩測量, 具有較高的固有頻率, 特別適用于動態測量。電容式力/ 力矩傳感器通過測量電容電極板間的相對空隙變化實現多維力/ 力矩測量。
基于光學的力/ 力矩傳感器主要包括三種: 一是采用 LED 和光電二極管, 通過監測光電二極管模擬信號輸出的變化辨別微小的結構位移; 二是將 LED 與攝像頭相結合, 應用計算機視覺算法量化結構位移; 三是基于光纖布拉格光柵 (FBG),通過檢測光纖在受力時應變或變形引起的反射波長的偏移實現力測量。其中, 光纖光柵傳感器具有抗電磁干擾、 體積小、 精度高、 遙感能力強和支持多路復用等優點, 但易受溫度波動的影響,材料較脆弱且易受到機械應力或彎曲損傷。
彈性體是多維力/ 力矩傳感器的核心部件, 其設計直接影響傳感器的性能。常見的彈性體結構包括十字梁型、 柱型、 梁柱型和斯圖爾特平臺。在機器人系統中, 力/ 力矩傳感器通常與其他傳感器 (如位置傳感器、 速度傳感器等) 相集成, 以實現更為復雜的運動控制。此外, 在使用前需要進行校準以確保測量結果的準確性。MEMS 力/ 力矩傳感器可實時感知機器人末端執行器 (如關節、 機械手、 手指、 夾持器等) 與物體間的操作力, 并反饋給控制器以保證機器人完成抓取、 搬運及打磨等操作。
在微創手術機器人中, 由于手術器械末端體積微小且操作空間狹窄, 通常將微型化 MEMS 力/力矩傳感器集成至手術器械末端, 用于提供實時的力反饋信息, 確保手術操作的精確性和安全性。Liu 等提出了一種用于機器人輔助微創手術的集成三維 MEMS 力傳感與反饋系統。借助力傳感反饋功能, 最大夾持力從 1. 2 N 降低至 0. 8 N, 平均夾持力從0. 8 N 降低至0. 55 N, 降幅約為20% ~50% 。同時, 在縫合打結實驗中, 操作者可以實時監測三維操作力。Hou 等設計了一種具有高集成度的 MEMS 壓阻式三維力傳感模塊, 能夠快速更換不同厚度和楊氏模量的彈性層, 從而實現不同手術器械集成的靈敏度和測量范圍可調。上述研究解決了手術過程中缺乏力感知的問題, 提高了復雜操作的安全性和可控性, 為醫療機器人的發展提供了技術支撐。
4. 2 MEMS 觸覺傳感器
觸覺傳感器是一種能夠將接觸刺激轉換為電信號進而實現感知量化的電子器件。近年來, 隨著柔性電子技術、 材料學、 MEMS 技術的發展,觸覺傳感技術賦予了機器人細膩、 豐富的觸覺感知功能, 如感受外界溫度、 壓力、 物體尺寸、 形狀、 材質及紋理等, 在智能抓取、 復雜操作、 人機交互、 安全控制等方面展現出巨大的應用潛力。
為了提升機器人的觸覺感知能力, 需要開發類似感知神經的電子器件, 以提高機器人電子皮膚 (E-Skin) 的感知能力, 實現動態、 非結構化和不確定環境下的安全交互。Wang 等開發出一種電子皮膚, 具有單片集成、 低電壓和柔軟等特性, 可以將施加的壓力或溫度變化轉化為電脈沖, 并向大腦傳輸電信號, 可用于假肢皮膚。
壓力感知作為觸覺傳感的主要功能之一, 是機器人感知外界接觸力并進行運動控制和力控制的關鍵。具有壓力感知功能的觸覺傳感器, 基于壓阻式、 電容式、 壓電式、 摩擦電式、 光學式、磁場式等原理, 將外界施加的壓力轉換為電信號。
Osborn 等利用具有壓阻特性的織物制備了類人體皮膚的多層結構觸覺傳感器, 為截肢者提供神經形態觸覺信息。Wang 等利用多級分層結構設計了高靈敏度、 寬檢測范圍的壓力傳感器陣列,實現了曲面應力的精準感知。Chen 等提出了一種結合摩擦電技術和電致變色顯示單元的多功能柔性電子皮膚, 能夠實現機器人對外界受力的實時監測與反饋。Gong 等設計了一種模塊化固液復合的三軸觸覺傳感器以模擬人類指尖觸覺結構, 基于內部霍爾磁場檢測電路測量磁場密度變化, 量化軟彈性體在外部力接觸時的變形, 實現精準的力感知和穩定的抓取。
溫度感知對機器人觸覺感知至關重要。熱電式溫度傳感器主要基于熱電材料的塞貝克效應,即熱電材料的兩個相對表面存在溫度差會產生電壓。熱敏電阻式溫度傳感器基于材料自身電阻隨溫度變化的特性, 測量溫度變化時產生的材料電阻變化量。此外, 機器人與外界物體接觸時, 通過觸覺感知能夠對接觸物體進行識別, 包括物體的輪廓、 紋理及硬度。
Li 等提出了一種基于熱感應的多維觸覺傳感技術, 實現了壓力、 溫度、流場、 熱物性等參數的集成測量, 采用類皮膚的多層結構實現多模感知原位集成, 將觸覺信息與機器學習相結合, 實現了對機器人靈巧手抓握物品的形狀、 大小和材料等的多屬性識別, 并成功應用于垃圾分類作業。
4. 3 發展趨勢
當前, MEMS 力/ 觸覺傳感器正朝著模塊化、集成化、 智能化和柔性化方向發展。機器人觸覺傳感器的每個傳感單元模塊不僅能夠監測壓力、溫度、 振動等多元物理參數, 還能夠執行信號處理與數據傳輸任務。各模塊之間通過機械接口和互聯通信接口相連接, 易于進行維護和擴展。
Cheng 等開發了一種六邊形多功能傳感單元模塊, 集成了壓力、 溫度、 接近、 加速度計等微型控制單元, 通過將多個模塊拼接組裝實現多模態感知機器人電子皮膚的研制。Ge 等利用共面叉指電極和摻雜炭黑聚合物材料制備出一種具有電容式和壓阻式的觸覺感知電子皮膚, 可用于機器人的接觸力檢測和安全控制。
隨著 AI 技術的發展, 機器學習算法將在機器人觸覺傳感和智能識別處理中發揮重要作用。通過深度學習算法, 可以提高觸覺傳感器的靈敏度和分辨率, 實現對細微壓力變化及物體表面精細特征的捕捉。Guo 等受瞬態電壓人工神經元(TVAN) 和持續電位人工神經元 ( SPAN) 信號的啟發, 開發了一種具有自生成零偏置信號的觸覺傳感器, 能夠實現多模態信息 ( 如振動、 材料、 紋理、 壓力和溫度) 的協同傳感。同時, 基于特征融合的機器學習算法能夠充分解碼輸出信息, 并補償實際應用中的作用力、速度等。
觸覺反饋技術是指利用振動、 觸摸、 熱和力反饋等傳輸觸覺信息, 增強機器人與人類的交互能力。觸覺反饋系統通過傳感器、 反饋器和算法處理, 將機器人操作環境中的觸覺信息傳遞至用戶。分布在機器人及靈巧手的觸覺傳感器能夠在非結構化的場景交互中提供多模態感知信息, 如接觸狀態、表面特征、 物理屬性等。這些信息通過觸覺反饋界面傳遞至用戶, 對機器人與環境、環境與人、人與機器人的安全、 自然交互具有重要作用。
5 MEMS 嗅覺傳感器
嗅覺感知作為一種新興的感知模式, 通過模擬生物體的嗅覺功能, 分辨常見氣味/ 氣體, 實現特定氣體濃度檢測以及主動且動態地定位氣味或氣體源。該技術相較傳統的被動氣味/ 氣體感知系統, 其顯著特征在于能夠感知、 追蹤并最終精確檢測氣味/ 氣體的濃度、 種類及其分布, 能夠顯著提升機器人對環境的理解能力, 在食品安全、 環境監測和醫學診斷等多個領域展現出巨大的應用潛力。
機器人嗅覺感知技術的核心在于氣體傳感器與氣體識別及定位算法的設計。氣體傳感器能夠收集環境中的氣體信息, 而氣體識別與定位算法能夠分析當前環境氣體種類與濃度以及推斷氣味源空間的位置。
5. 1 原理
氣體傳感器是機器人嗅覺系統的核心硬件組件, 能夠將氣體分子與傳感器材料的反應轉化為可處理的電信號。根據其不同工作原理, 氣體傳感器主要分為半導體式、 催化燃燒式、 電化學式、光學式等多種類型。
其中, 半導體式氣體傳感器主要基于金屬氧化物半導體材料的電導率隨環境氣體成分變化的特性, 具有成本低、 靈敏度高和響應速度快等優點。催化燃燒式氣體傳感器通過可燃氣體在催化劑表面燃燒產生的熱量引起的傳感器元件溫度變化檢測氣體, 適用于可燃性氣體檢測, 具有計量準確、 響應快速的特點。電化學式氣體傳感器通過測量氣體在電解液中發生氧化還原反應時產生的電流變化檢測氣體, 具有線性輸出和低功耗等優點。然而, 實際檢測中會同時存在多種氣體, 且彼此之間結構和性質十分相近,對目標氣體的檢測帶來很大干擾, 難以獲得準確的目標氣體濃度數據, 導致檢測誤差, 阻礙了氣體傳感器在嗅覺感知方面的應用。
Persaud 等使用多個半導體式氣體傳感器構建了世界上第一個電子鼻, 證明了不同氣味的區分可以在不使用特異性氣敏材料的情況下實現。Fahad 等提出了一種基于 3. 5nm 硅溝道晶體管的氣敏場效應晶體管 (CS-FET) 陣列, 實現了常溫下多種氣體的高選擇性檢測。為了解決氣體傳感器陣列體積大、 能耗高及可靠性差的問題, 多維度氣體傳感器成為氣體傳感器的研究熱點。Li等提出了基于石英晶體微天平 (QCM) 傳感器 BVD 等效模型的壓電式氣體傳感器虛擬陣列。利用氣敏薄膜的多種特性信息, 結合支持向量機和人工神經網絡算法, 能夠識別多種結構相似的氣體。
5. 2 氣體源定位算法
氣體源定位算法是機器人嗅覺系統中的關鍵技術, 能夠幫助機器人識別并定位環境中的氣體源。通過分析來自氣體傳感器的濃度數據, 機器人可以推測出氣味的來源位置。機器人氣體源定位通常可劃分為三個子任務: ①氣體搜索, 探測環境中氣體的存在; ②氣體追蹤, 沿著氣體羽流路徑進行追蹤; ③氣體源確認, 即通過氣體傳感信息綜合計算確定氣體源的精確位置。
機器人氣味源定位相關研究始于 20 世紀 90年代。Ishida 等開展了嗅覺定位研究, 提出了多種基于仿生學的氣味源搜索策略, 包括仿飛蛾搜 索、 濃 度 梯 度 搜 索 和 逆 風 搜 索 等。Hayes等以 Moorebots 機器人為平臺, 采用蜂群算法開展了自主群機器人嗅覺定位研究, 證明多個機器人之間的基本通信可以提高氣味源定位系統的效率。
陳欣星提出了多種煙霧源定位算法, 優化了多模式概率圖, 成功實現了煙霧源的高精度定位。對于未知環境的煙霧羽流路徑追蹤, 采用了局部感知窗粒子濾波算法, 并結合改進的螢火蟲算法提高了定位成功率。在復雜環境中, 結合深度 Q 網絡算法確保機器人能夠避開障礙物并精確定位煙霧源。
5. 3 發展趨勢
機器人仿生嗅覺是一個新興的跨學科研究領域, 結合了傳感器技術、 智能控制和氣體傳播等多種學科。其目標是賦予機器人類似生物嗅覺的能力, 能夠識別氣體種類、 確定氣體濃度, 并實現氣體分布的確定與氣體源定位, 廣泛應用于環境監測、 災難救援等。盡管該領域在理論研究和實驗室應用中取得了一些進展, 但距離實際應用仍存在較大差距, 主要挑戰包括氣體傳感器技術的限制及氣體傳播的不可預測性。
近年來, 隨著仿生氣體傳感器和氣體傳播模型的研究深入, 部分問題得到了解決。然而, 國內在該領域的研究仍處于初期階段, 尤其是在氣體傳感器性能提升、氣體識別與仿生氣源定位策略方面較為薄弱。雖然當前面臨諸多挑戰, 但機器人仿生嗅覺技術前景廣闊, 有望在未來實現廣泛應用。
6 結語
傳感器是機器人實現智能化的關鍵, 而具身智能機器人為 MEMS 技術的發展帶來新的機遇。人形機器人的功能性突破及 AI 大模型的快速迭代, 對具身智能機器人的發展具有積極的促進作用。具身智能通過機器人等物理實體與環境交互,能夠實現環境感知、 信息認知和自主決策, 并能夠從經驗反饋中實現智能增長和行動自適應。作為機器人感知的物理層 MEMS 傳感器, 結合 AI大模型和多傳感融合技術, 機器人能夠實現智能識別、 智能規劃、 智能抓取和智能交互等功能,促進具身智能機器人的創新發展與應用。
作者簡介:
劉會聰 (1982—), 女, 博士, 教授, 博士研究生導師, 研究方向: 微納器件與系統、 微納感知與人機交互、 微能源與自傳感系統。
孫立寧 (通信作者) (1964—), 男, 博士, 教授, 博士研究生導師, 研究方向: 先進機器人技術、 醫療手術機器人、 微納米機器人、 機器人智能化與自主化。
審核編輯 黃宇
-
機器人
+關注
關注
213文章
29663瀏覽量
212396 -
MEMS傳感器
+關注
關注
16文章
435瀏覽量
43169
發布評論請先 登錄
恭賀 | 晟鵬創始人成會明院士當選歐洲科學院院士!

南京工業大學:仿生觸覺傳感系統讓機器人擁有“人類指尖”般的細膩感知
清華大學:軟體機器人柔性傳感技術最新研究進展

智能駕駛傳感器發展現狀及發展趨勢
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】+初品的體驗

中國科大:在機器人觸覺傳感器研究中取得重要進展

這批中國企業,在做人形機器人觸覺傳感器
機器人技術的發展趨勢
觸覺傳感器的發展,對機器人產業有什么影響?
清華大學:軟體機器人柔性傳感技術最新研究進展






 工商網監
工商網監
評論