") 機(jī)器人驅(qū)動(dòng)部件如何選型?一文看懂!(電機(jī)、減速器)
機(jī)器人驅(qū)動(dòng)部件如何選型?一文看懂!(電機(jī)、減速器)

電子發(fā)燒友網(wǎng)報(bào)道(文/梁浩斌)人形機(jī)器人伴隨AI技術(shù)的爆發(fā),開始從實(shí)驗(yàn)室逐步邁入量產(chǎn)。Precedence Research預(yù)測(cè),2032年全球人形機(jī)器人市場(chǎng)規(guī)模將超過2000億元人民幣,2022年到2032年市場(chǎng)規(guī)模復(fù)合年均增長(zhǎng)率將達(dá)到33.3%。
從2024年開始,全球多家機(jī)器人公司推出全新的人形機(jī)器人硬件產(chǎn)品,AI大模型和強(qiáng)化學(xué)習(xí)技術(shù)的應(yīng)用,則幫助人形機(jī)器人解決了運(yùn)動(dòng)算法的難題,解決了人形機(jī)器人運(yùn)動(dòng)穩(wěn)定性問題后,自主AI能力的加入有機(jī)會(huì)真正實(shí)現(xiàn)“具身智能”。
那么對(duì)于現(xiàn)階段還未實(shí)現(xiàn)“具身智能”的人形機(jī)器人來說,驅(qū)動(dòng)機(jī)器人運(yùn)動(dòng)的部件是最核心的部分,下面我們簡(jiǎn)單剖析一下目前市場(chǎng)上主流的機(jī)器人驅(qū)動(dòng)部件,了解不同部件的選型差異。
人形機(jī)器人驅(qū)動(dòng)核心
根據(jù)目前現(xiàn)有的產(chǎn)品來看,按照動(dòng)力來源的不同,驅(qū)動(dòng)機(jī)器人運(yùn)動(dòng)的執(zhí)行器可以主要分為液壓和電機(jī)。在機(jī)器人研究初期也出現(xiàn)過一些氣壓驅(qū)動(dòng)的機(jī)器人,氣動(dòng)在工業(yè)自動(dòng)化中應(yīng)用較多,但對(duì)于人形機(jī)器人來說,難以實(shí)現(xiàn)精準(zhǔn)控制、驅(qū)動(dòng)效率低,故逐漸被淘汰。
液壓驅(qū)動(dòng)機(jī)器人國(guó)內(nèi)外都有研究,著名的波士頓動(dòng)力的Atlas機(jī)器人就采用液壓驅(qū)動(dòng),國(guó)內(nèi)相關(guān)研究主要是大學(xué)實(shí)驗(yàn)室內(nèi)開展的。另外近年還有波蘭的Clone Robotics公司使用水和電力驅(qū)動(dòng),利用電水泵和微型閥門,向人造肌肉和血管系統(tǒng)以一定壓力輸送液體,驅(qū)動(dòng)機(jī)器人肌肉系統(tǒng)運(yùn)動(dòng)。液壓驅(qū)動(dòng)結(jié)構(gòu)簡(jiǎn)單,輸出功率大,但相對(duì)維護(hù)和制造成本高,目前波士頓動(dòng)力新一代 Atlas機(jī)器人已經(jīng)從液壓驅(qū)動(dòng)轉(zhuǎn)為電驅(qū)。
來源:長(zhǎng)城證券
而電機(jī)能夠?qū)崿F(xiàn)精確的位置、速度和扭矩控制,這對(duì)于模仿人類復(fù)雜的關(guān)節(jié)運(yùn)動(dòng)和維持動(dòng)態(tài)平衡至關(guān)重要。 與此同時(shí)電機(jī)的能量轉(zhuǎn)換效率極高,且本身一些電機(jī)的功率密度也比較大,可以便于應(yīng)用在人形機(jī)器人較小的結(jié)構(gòu)空間內(nèi)。成本方面,電機(jī)大規(guī)模量產(chǎn)的成本要相比其他驅(qū)動(dòng)方式更低。總體來看電機(jī)更契合人形機(jī)器人對(duì)動(dòng)態(tài)性能、可維護(hù)性及商業(yè)可行性的綜合需求,因此成為目前人形機(jī)器人的主流驅(qū)動(dòng)核心。
但電機(jī)直驅(qū)也難以滿足機(jī)器人各種關(guān)節(jié)的扭矩需求,因此在實(shí)際的機(jī)器人應(yīng)用中,驅(qū)動(dòng)執(zhí)行器除了電機(jī)外,還需要減速器、絲杠、編碼器、力傳感器等部件。
目前人形機(jī)器人上常用的電機(jī)可以分為力矩電機(jī)、空心杯電機(jī)、無框力矩電機(jī)、永磁同步電機(jī)這幾種類型。
力矩電機(jī):在結(jié)構(gòu)上采用定子和轉(zhuǎn)子軸向排列,體積較大但軸向尺寸緊湊;具備低速高扭輸出能力,可以直接驅(qū)動(dòng),適合快速啟停和精準(zhǔn)控制。由于直驅(qū)的特性,力矩電機(jī)適合用于人形機(jī)器人的髖關(guān)節(jié)上。
無框力矩電機(jī):相比力矩電機(jī),無框力矩電機(jī)即簡(jiǎn)化了外殼結(jié)構(gòu),只提供定子和轉(zhuǎn)子,電機(jī)需嵌入機(jī)器人機(jī)械結(jié)構(gòu)中。一般需要與諧波減速器、編碼器組合成緊湊關(guān)節(jié)模塊。這種電機(jī)的優(yōu)勢(shì)在于扭矩密度高,散熱也可以與機(jī)器人的結(jié)構(gòu)共同優(yōu)化,散熱效率上限高,空間利用率高,同時(shí)保持高精度。在人形機(jī)器人中,無框力矩電機(jī)在靈巧手、膝關(guān)節(jié)等部分應(yīng)用。
空心杯電機(jī):轉(zhuǎn)子采用空心杯形繞組,無鐵芯的設(shè)計(jì),重量極輕;轉(zhuǎn)動(dòng)慣量?jī)H為傳統(tǒng)電機(jī)的1/10,響應(yīng)速度極快;無鐵損,能量轉(zhuǎn)換效率可達(dá)90%以上。總結(jié)就是有超輕量化,響應(yīng)快,低噪音,無齒槽效應(yīng)、效率高等優(yōu)點(diǎn),缺點(diǎn)則輸出扭矩小,過載易燒毀,成本較高。因此空心杯電機(jī)適合一些小扭矩的場(chǎng)景,如醫(yī)療微型手術(shù)器械、昆蟲仿生機(jī)器人等,在人形機(jī)器人上,靈巧手中也大量用到空心杯電機(jī)。
永磁同步電機(jī):這是應(yīng)用極為廣泛的電機(jī)類型,新能源汽車、兩輪電動(dòng)車都有應(yīng)用。主要的結(jié)構(gòu)是嵌入永磁體的轉(zhuǎn)子,以及三相繞組的定子,需要復(fù)雜算法對(duì)磁場(chǎng)進(jìn)行定向控制。但優(yōu)勢(shì)明顯,扭矩密度高、精度高、效率大于95%,在機(jī)器人領(lǐng)域,像工業(yè)機(jī)器人的機(jī)械臂、輪足機(jī)器人的輪轂驅(qū)動(dòng)部分會(huì)使用到永磁同步電機(jī)。
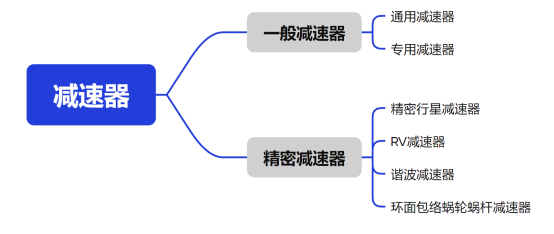
減速器在機(jī)器人中,是連接電機(jī)和執(zhí)行機(jī)構(gòu)的關(guān)鍵部件,其核心作用是將電機(jī)的高速低扭矩輸出轉(zhuǎn)換為低速高扭矩輸出,從而滿足機(jī)器人關(guān)節(jié)對(duì)精準(zhǔn)運(yùn)動(dòng)控制、高負(fù)載能力和穩(wěn)定性的需求。減速器主要有四種類型:
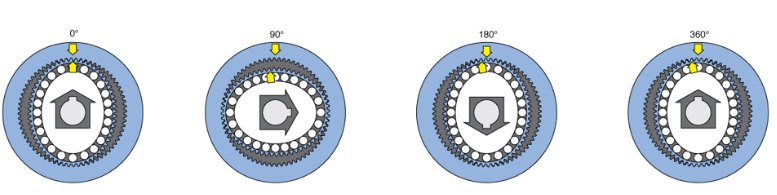
諧波減速器:由波發(fā)生器、柔輪和剛輪組成,通過彈性變形傳遞運(yùn)動(dòng),有高精度、高減速比、體積小、重量輕等優(yōu)勢(shì);缺點(diǎn)是柔輪易疲勞,長(zhǎng)期重載可能影響壽命。主要應(yīng)用在小臂、腕部等關(guān)節(jié)。
RV(Rotary Vector旋轉(zhuǎn)矢量)減速器:由兩級(jí)減速(行星齒輪+擺線針輪)組成,具有高剛性、高扭矩、高精度的優(yōu)勢(shì);缺點(diǎn)是體積較大。RV減速器主要應(yīng)用在重型機(jī)器人的基座關(guān)節(jié)上,工業(yè)上應(yīng)用較多。
行星減速器:由中心太陽(yáng)輪、行星輪和外齒圈組成,多級(jí)齒輪嚙合。具備中等的精度和負(fù)載能力,成本較低,結(jié)構(gòu)緊湊;缺點(diǎn)是易磨損。適合中小型機(jī)器人使用,比如輕型的機(jī)械臂、服務(wù)型機(jī)器人等。
擺線針輪減速器(Cycloidal Drive):是利用擺線盤和針齒的嚙合實(shí)現(xiàn)減速,具備高減速比、高扭矩密度、抗沖擊性強(qiáng)的優(yōu)勢(shì),但加工難度高,成本高。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29650瀏覽量
212312 -
電機(jī)
+關(guān)注
關(guān)注
143文章
9275瀏覽量
149000
發(fā)布評(píng)論請(qǐng)先 登錄
機(jī)器人關(guān)節(jié)諧波減速器解讀
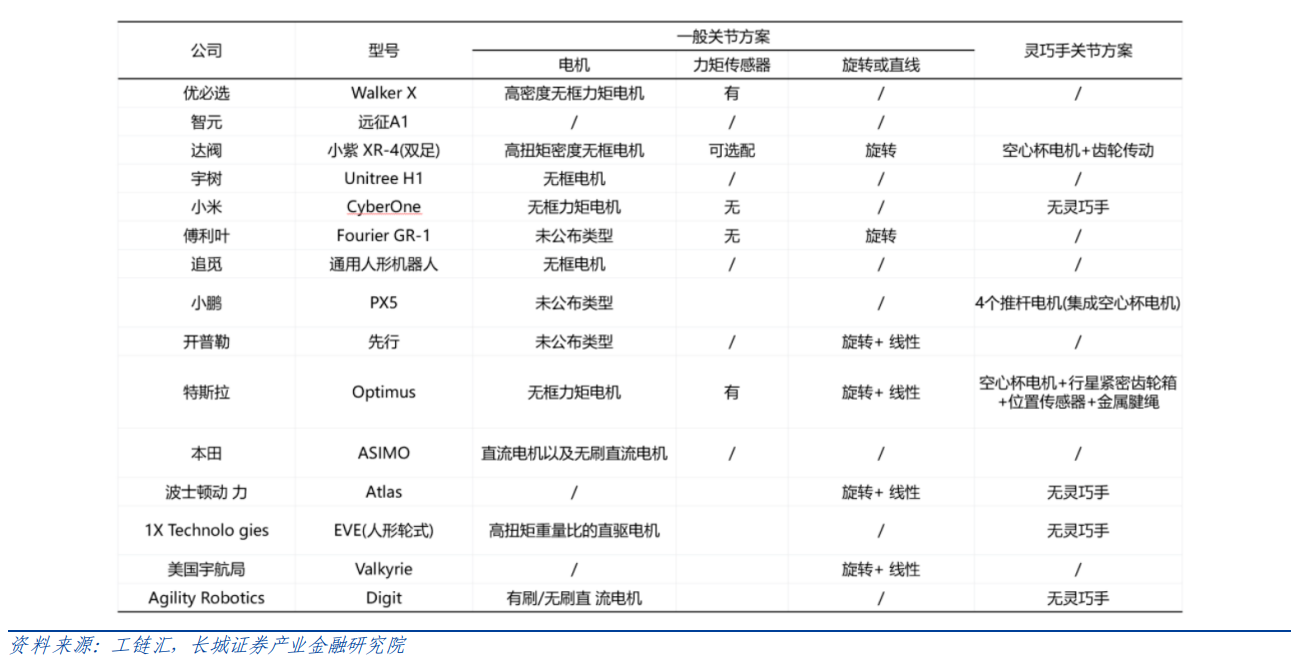
主要人形機(jī)器人廠商的電機(jī)驅(qū)動(dòng)與傳感系統(tǒng)對(duì)比
人形機(jī)器人關(guān)節(jié)核心零部件,諧波減速器的技術(shù)挑戰(zhàn)和創(chuàng)新發(fā)展趨勢(shì)
關(guān)節(jié)電機(jī)驅(qū)動(dòng),解鎖智能機(jī)器人 的“靈動(dòng)” 密碼

工業(yè)機(jī)器人減速器行業(yè)發(fā)展分析
伺服電動(dòng)缸在人形機(jī)器人中的應(yīng)用
諧波減速器工作原理 諧波減速器與齒輪減速器的區(qū)別
諧波減速器選型的常見誤區(qū)
諧波減速器與伺服電機(jī)的配合
諧波減速器的適用領(lǐng)域分析
諧波減速器的安裝步驟及注意事項(xiàng)
如何選擇合適的諧波減速器
成都匯陽(yáng)投資關(guān)于人形機(jī)器人核心部件,看好國(guó)產(chǎn)諧波廠商充分受益
一文看懂人形機(jī)器人成本占比最高的核心部件:減速器
機(jī)器人諧波減速器的發(fā)展現(xiàn)狀與趨勢(shì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論