 從“單腦”到“雙腦”:具身智能機器人邁向L4時代的核心架構革新
從“單腦”到“雙腦”:具身智能機器人邁向L4時代的核心架構革新

2025年3月5日,十四屆全國人大三次會議審議的政府工作報告中明確提出,建立未來產業投入增長機制,培育包括具身智能在內的生物制造、量子科技、6G等未來產業。這一政策信號釋放了國家對具身智能產業發展的高度重視,為行業發展注入了強勁動力。2024年世界機器人大會上發布的《人形機器人十大趨勢展望》指出,具身智能是可以在高變化下做出迅猛、精準反應的高質量、高性能智能系統。隨著技術的不斷突破和產業生態的逐步完善,具身機器人正加速從實驗室走向現實應用場景,成為現代化產業體系建設的重要力量。
在政策與技術的雙重驅動下,具身機器人行業正經歷從“實驗室探索”到“場景落地”的關鍵轉折,邁向L4級智能化成為當前行業的重要發展方向。然而,隨著機器人智能化層級從L3(條件自主)向L4(高度自主)過渡,其核心矛盾愈發凸顯——如何讓機器人像人類一樣,既擁有“思考”的大腦,又具備“執行”的小腦?
行業痛點
從L0到L5,智能化躍遷的終極挑戰
具身機器人的自主能力分為六個層級:
L0(無自主性)
僅能依靠人類指令實現結構驅動,無任何智能化設計,如早期工業機械臂;
L1(輔助控制)
可以驅動關節實現拖拽、錄制、回放等功能;
L2(部分自主)
在算法的驅動下規劃運動軌跡和路徑,完成特定動作;
L3(條件自主)
具備感知能力,利用傳感器獲取環境信息,能夠自主識別、理解和反饋預設動作,但仍需人類監控;
L4(高度自主)
具備一定認知,能夠通過觀察、測量、預設等方式自主推理,完成任務,不需要人的頻繁干預;
L5(完全自主)
完全具備人類的思維和創造力,能夠自主判斷,做出決策并執行復雜任務;
當前,具身機器人行業正處于L3向L4過渡的關鍵階段,核心矛盾集中在感知與決策的深度協同:機器人需同時處理多模態數據(視覺、語音、點云)并實現毫秒級運動控制,傳統單域控制器(如純AI算力或純運控方案)難以兼顧算力與實時性。
技術躍遷
從“單腦”到“雙腦”,人形機器人的核心架構革新
在L4級智能化中,人形機器人需模仿人類的“大腦”與“小腦”協同機制:
● “大腦”:負責自然交互、意圖理解、分層規劃與錯誤反思,依賴高算力支持大模型推理(如解析用戶指令“請整理桌面”并拆解為子任務);
●“小腦”:承擔全身協調、穩定行走、技能拆解與動態糾錯,需高實時性控制(如雙臂協作抓取物體時避免碰撞)。
即對多模態感知的算力需求與運動控制的實時性要求。但傳統方案常顧此失彼——純AI算力平臺難以支撐高精度運動,而實時運控系統又缺乏環境理解能力。因此,如何讓機器人像人類一樣,既擁有“思考”的大腦,又具備“執行”的小腦?成為行業重點關注的議題。
阿普奇答案
KiWiBot系列“核心大小腦”控制器
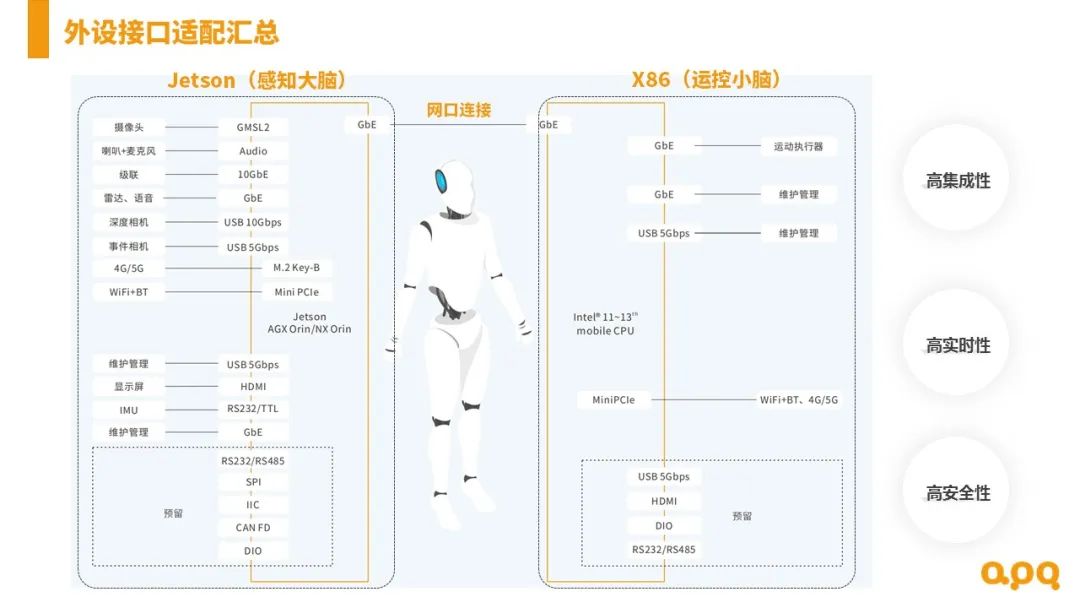
基于具身機器人“大腦+小腦”核心需求,阿普奇KiWiBot系列控制器,以“感知大腦+運控小腦”雙域融合架構逐一擊破行業瓶頸:


1
高性能:兼顧AI推理與實時運控
大腦(Jetson平臺):提供275TOPS+算力,支持視覺、語音、點云等多模態數據處理,滿足大模型實時推理需求。
小腦(X86平臺):采用Intel移動處理器,優化BIOS中斷調度模型,實現70軸協同控制、1000Hz運控節拍與35μs指令抖動,解決傳統EtherCAT網絡200ms抖動的行業難題。
2
高可靠:極端環境下的穩定運行
準車規級測試體系:通過23類1000+項測試,包括功能性測試、兼容性測試、環境可靠性測試,電磁兼容性測試,安全測試,法規合規性測試等。
三防設計+智能散熱:主板三防涂層抵御腐蝕與震動,嵌入式散熱方案在同等性能下大大減少,適配人形機器人緊湊結構。
3
多場景適用
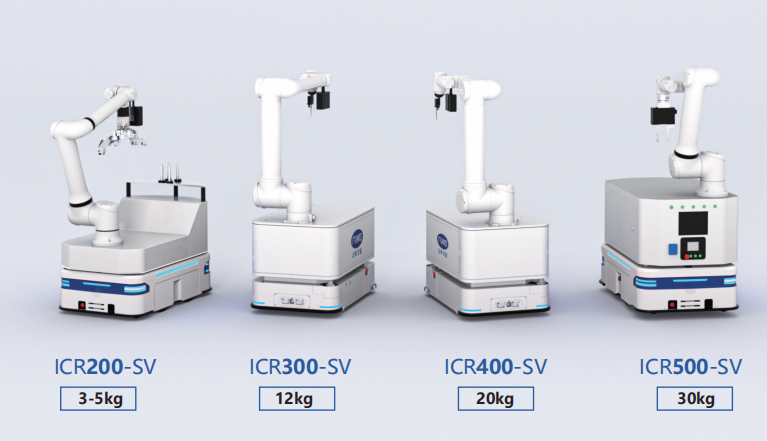
服務機器人:如家庭陪伴機器人、酒店服務機器人,依賴AI算力實現語音識別、人臉識別等功能。
工業機器人:如倉儲物流機器人,需要高性能實時控制和路徑規劃能力。
特種機器人:如救援機器人、巡檢機器人,適應復雜環境下的高可靠性和寬溫工作需求。
在具身機器人從“工具”邁向“伙伴”的進程中,阿普奇以KiWiBot系列重新定義了控制器的技術邊界。“雙腦協同”架構不僅破解了L3向L4落地的核心矛盾,更以模塊化、高可靠的特性推動機器人從“工業專用”走向“消費普惠”。
讓工業更可靠
成就生活之美
更多產品信息,請點擊 “聯系客服”
或撥打全國服務熱線:400-702-7002
審核編輯 黃宇
-
機器人
+關注
關注
213文章
29664瀏覽量
212398 -
具身智能
+關注
關注
0文章
134瀏覽量
446
發布評論請先 登錄
從“單腦”到“雙腦”:具身智能機器人邁向L4時代的核心架構革新

從感知到運控:具身智能機器人控制器的雙腦協同設計與場景適配






 工商網監
工商網監
評論