") Mobileye ADAS/高精度地圖方技術(shù)到底好在哪
Mobileye ADAS/高精度地圖方技術(shù)到底好在哪

在近日的Simicon智能汽車(chē)電子AI Inside分論壇上,英特爾子公司MobileyeSales Director童立豐分享了Mobileye高級(jí)駕駛輔助系統(tǒng)(ADAS)技術(shù),并透露了未來(lái)幾年Mobileye 路網(wǎng)采集管理(REM?)等方面的技術(shù)和駕駛策略。
Mobileye ADAS技術(shù)
當(dāng)前多數(shù)車(chē)企上的自動(dòng)駕駛汽車(chē)采用Mobileye ADAS技術(shù),其中,超過(guò)10家核心伙伴正在與Mobileye研發(fā)自動(dòng)駕駛車(chē)型。
基于此,童立豐介紹,Mobileye的ADAS主要是一種識(shí)別技術(shù)。用單目攝像頭來(lái)探測(cè)前面的路況,將前方的車(chē)、路、人等信息拍攝出來(lái)后,用核心芯片進(jìn)行計(jì)算分析。他解釋?zhuān)紫茸R(shí)別前方的目標(biāo)物,包括車(chē)道線、車(chē)輛、行人,以及限速牌、路標(biāo)等信息。通過(guò)判斷后,會(huì)實(shí)時(shí)探測(cè)前車(chē)TTC的碰撞時(shí)間,判斷本車(chē)與前車(chē)發(fā)生碰撞時(shí)間點(diǎn),并給駕駛員提前發(fā)出預(yù)警。童立豐認(rèn)為,這是ADAS技術(shù)的第一步應(yīng)用,也是攝像頭傳感器的基礎(chǔ)。
此外,自動(dòng)駕駛要實(shí)現(xiàn)L0-L5級(jí)的逐步升級(jí),車(chē)輛提前預(yù)警是第一步,第二步是實(shí)現(xiàn)自動(dòng)控制。智能汽車(chē)L1級(jí)的應(yīng)用包括“車(chē)輛識(shí)別-提前預(yù)警-自動(dòng)剎車(chē)”的動(dòng)作,L2級(jí)是在限定的區(qū)域里(比如:高速公路)進(jìn)行車(chē)道保持以及車(chē)道切換的工作,另外,還需精準(zhǔn)識(shí)別車(chē)道線,實(shí)現(xiàn)車(chē)道線變更輔助。攝像頭在其中扮演的角色至關(guān)重要。
Mobileye多年來(lái)都專(zhuān)注于單目攝像頭,在車(chē)載傳感器領(lǐng)域,攝像頭、雷達(dá)和激光雷達(dá)都是主流的傳感器方案。“從自動(dòng)駕駛的角度來(lái)說(shuō),多傳感器的融合是未來(lái)的核心方向。攝像頭的強(qiáng)項(xiàng)是在于它的技術(shù)延展性很強(qiáng),因?yàn)樗拖袢艘粯涌梢詫?shí)時(shí)探測(cè)前面的路況。”童立豐還強(qiáng)調(diào),“對(duì)于攝像頭技術(shù)的定位,最關(guān)鍵的還是軟件算法層面,即拍攝到的路面情況如何通過(guò)芯片AI的分析將里面的障礙物或者是標(biāo)志、標(biāo)線識(shí)別出來(lái),接著才是進(jìn)行實(shí)時(shí)判斷,比如碰撞時(shí)間或者是變線時(shí)間的判斷。”
除了上述基本功能之外,Mobileye還是最早將攝像頭傳感器作為一個(gè)核心技術(shù)來(lái)開(kāi)發(fā)的企業(yè)。如今,自動(dòng)駕駛領(lǐng)域有三項(xiàng)支柱支撐其發(fā)展。第一項(xiàng)是感知,包括攝像頭、雷達(dá)、激光雷達(dá)。第二項(xiàng)是高精度地圖,該領(lǐng)域?qū)obileye而言是攝像頭傳感器的技術(shù)延伸。第三是駕駛策略,有了傳感器對(duì)路況探測(cè)的信息來(lái)源和高精度地圖定位之后,這些數(shù)據(jù)最終要通過(guò)駕駛策略來(lái)實(shí)現(xiàn)。Mobileye的自動(dòng)駕駛理念是使汽車(chē)融入駕駛過(guò)程,以此來(lái)確保自動(dòng)駕駛汽車(chē)的安全性。
Mobileye高精度地圖解決方案
Mobileye在高精度地圖方面做了什么工作?
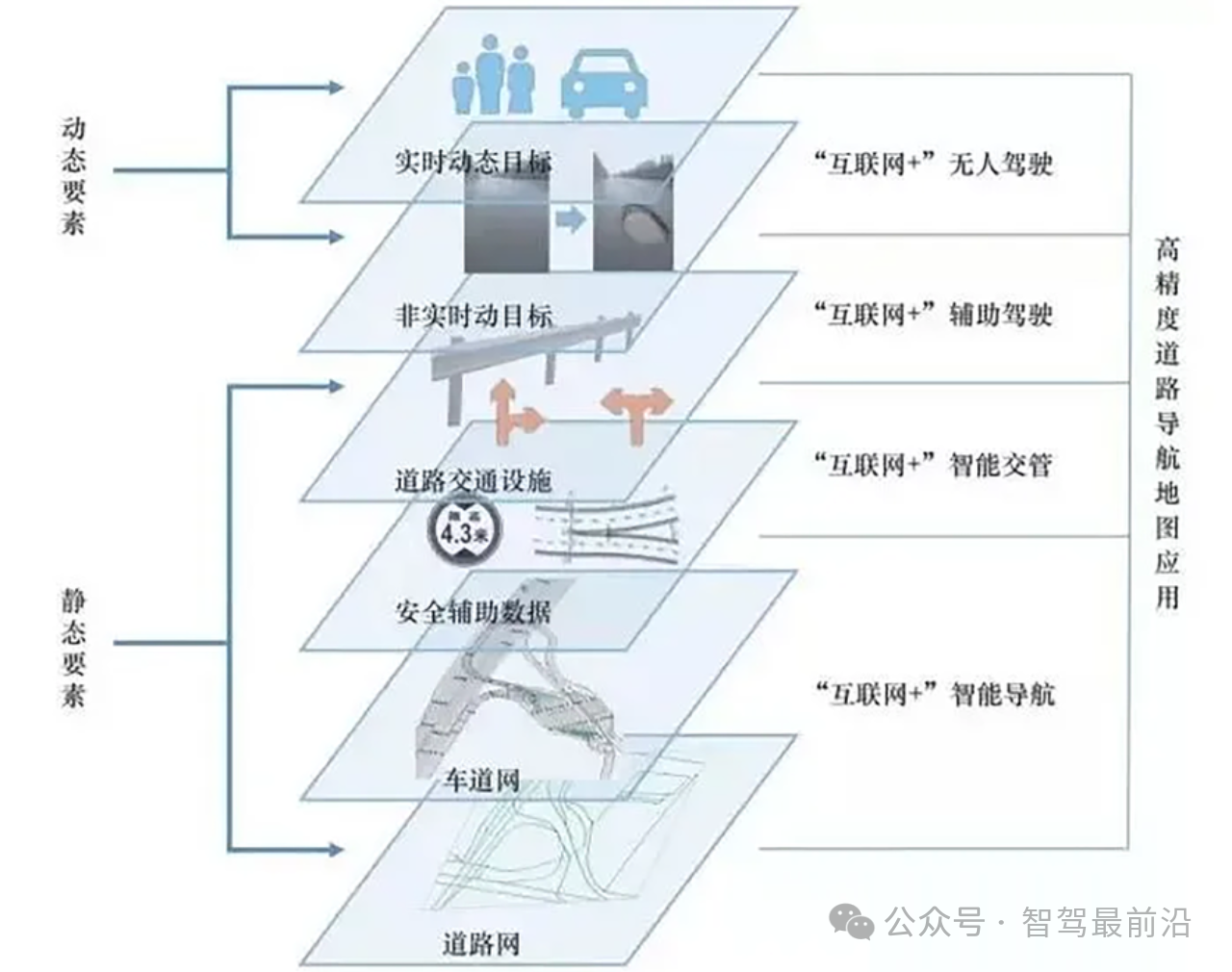
首先,Mobileye本身不涉及高精度地圖的制作,地圖商是做高精度地圖的基礎(chǔ)。而Mobileye做的是對(duì)高精度地圖數(shù)據(jù)的實(shí)時(shí)更新。傳統(tǒng)的高精度地圖的最大問(wèn)題在于更新,如歐洲的Here,日本的Zenrin,中國(guó)的四維、高德等公司,基本都采用傳統(tǒng)方案,通過(guò)采量車(chē)進(jìn)行地圖采量。該類(lèi)方案的問(wèn)題在于,它的采集需要大量的視頻和數(shù)據(jù),這些數(shù)據(jù)的上傳、實(shí)時(shí)更新都是一個(gè)大問(wèn)題。
針對(duì)此情況,Mobileye的每一個(gè)攝像頭都可以采集到前面的路況。例如,攝像頭可以把路面中的車(chē)道線或者是限速塊的距離可以定位出來(lái),把每一個(gè)圖像解析成數(shù)據(jù),再把數(shù)據(jù)打包成數(shù)據(jù)包進(jìn)行上傳,并且在圖商的底圖上進(jìn)行實(shí)時(shí)的疊加。通過(guò)Mobileye和大眾、日產(chǎn)以及通用的合作,會(huì)有越來(lái)越多的車(chē)搭載Mobileye的攝像頭。通過(guò)圖像+智能+網(wǎng)聯(lián)的結(jié)合方案,可以做到10cm級(jí)的高精度。
另外,地圖上還有一個(gè)關(guān)鍵信息是路面坑洞或者是突發(fā)事故。自動(dòng)駕駛過(guò)程當(dāng)中,常規(guī)情況認(rèn)為車(chē)道是比較干凈的,但是實(shí)際上路面會(huì)有坑洞,或有山體掉石頭等障礙物出現(xiàn)。此類(lèi)識(shí)別也是Mobileye的一項(xiàng)技術(shù)。Mobileye該項(xiàng)技術(shù)可根據(jù)障礙物的信息,可以構(gòu)建一個(gè)高精度地圖的路線。
Mobileye REM?技術(shù)
另外,童立豐還介紹了Mobileye的REM?技術(shù),他認(rèn)為該技術(shù)是未來(lái)的主要方向,它的主要工作是高精度地圖的數(shù)據(jù)采集和分析。
REM?地圖服務(wù)技術(shù)有一個(gè)端到端的共享和本地化引擎,該方案由三層設(shè)備組成:繪制設(shè)備(任何配備Mobileye攝像頭的汽車(chē))、云端數(shù)據(jù)融合器和使用設(shè)備(自動(dòng)駕駛汽車(chē))。Mobileye REM?技術(shù)配備的攝像頭成本與能耗都很低,可感知幾何路徑和其他靜態(tài)場(chǎng)景語(yǔ)義(如交通標(biāo)志和道路標(biāo)記),還可保持高頻的刷新率,與激光雷達(dá)相比,攝像頭是更 好的互補(bǔ)。
童立豐介紹,今年下半年Mobileye將發(fā)布Mobileye 8系統(tǒng)。該系統(tǒng)將搭載最新的EyeQ4的芯片,同時(shí)也會(huì)搭載最新的REM?技術(shù)。他補(bǔ)充說(shuō),“在REM地圖的應(yīng)用方面,Mobileye主要有兩個(gè)規(guī)劃。第一是和主流車(chē)廠合作伙伴合作,批量地在前裝就把這個(gè)技術(shù)進(jìn)行植入。第二是我們會(huì)在全球各地與政府或者大型的企業(yè)和圖商來(lái)做REM方案。”
童立豐認(rèn)為,Mobileye REM?技術(shù)方案的出現(xiàn)將會(huì)完全顛覆原來(lái)后裝市場(chǎng)ADAS的商業(yè)模式。REM?的技術(shù)突顯之后,原來(lái)的銷(xiāo)售硬件通過(guò)降低事故來(lái)覆蓋成本的商業(yè)模式將被改變。
-
汽車(chē)電子
+關(guān)注
關(guān)注
3037文章
8328瀏覽量
170015
發(fā)布評(píng)論請(qǐng)先 登錄
自動(dòng)駕駛中常提的高精度地圖是個(gè)啥?有何審查要求?

谷歌地圖GPS定位
高精度交流充電樁負(fù)載方案
藍(lán)牙AoA高精度定位技術(shù)打造智慧博物館定位方案
ads1278高速模式和高精度模式下所能得到的最高精度是多少?
請(qǐng)問(wèn)ADS1263能做到多高精度?實(shí)現(xiàn)高精度應(yīng)該注意什么?
物聯(lián)網(wǎng)系統(tǒng)中高精度RTK定位方案的實(shí)現(xiàn)_高精度定位模塊

VS高精度電壓傳感器
高精度融合定位技術(shù)的原理、應(yīng)用領(lǐng)域以及未來(lái)發(fā)展趨勢(shì)

北斗RTK高精度定位技術(shù)原理、技術(shù)優(yōu)勢(shì)及應(yīng)用領(lǐng)域

拋棄高精度地圖舊模式,走向視覺(jué)感知新時(shí)代?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論