 CANFD技術在實時運動控制系統中的應用:協議解析、性能測試與未來發展趨勢
CANFD技術在實時運動控制系統中的應用:協議解析、性能測試與未來發展趨勢

摘要: 本文深入探討了CANFD技術在實時運動控制系統中的應用。通過對傳統CAN協議與CANFD協議的對比分析,詳細闡述了CANFD在提升數據傳輸效率、增強系統實時性與穩定性方面的優勢。文章結合具體測試案例,對CANFD總線的性能指標進行了全面評估,并分析了當前技術應用中的挑戰與未來發展趨勢。研究表明,CANFD技術憑借其技術特性,在實時運動控制系統中展現出巨大潛力,且隨著技術演進與融合,其應用前景將更為廣闊。
關鍵詞:CANFD;實時運動控制;性能測試;發展趨勢
一、引言
在自動化領域,實時運動控制系統對于通信協議的要求極為嚴苛,既要保障數據的高速傳輸,又要確保系統的穩定與精準。CANFD(Controller Area Network with Flexible Data-rate)技術應運而生,它在傳統CAN協議基礎上進行了顯著優化,極大地提升了數據傳輸速率與單幀數據容量,為解決實時運動控制系統中的通信瓶頸問題提供了有效途徑。
二、CANFD協議解析
(一)傳統CAN協議的局限
傳統CAN協議自誕生以來,在汽車電子、工業自動化等領域廣泛應用,但其局限性也逐漸暴露。一方面,傳統CAN協議規定每幀數據最多僅能攜帶8個字節,對于復雜的運動控制指令與多參數傳輸而言,數據量明顯不足;另一方面,其最大數據傳輸速率被限制在1Mbps,在多節點、高頻數據交互的實時運動控制系統中,這一速率難以滿足系統對實時性的要求。
(二)CANFD的關鍵改進
數據傳輸速率的提升 CANFD技術突破了傳統CAN協議的速率限制,在仲裁階段可沿用傳統CAN的波特率,而在數據傳輸階段,波特率可靈活提升至仲裁階段的數倍,最高可達8Mbps。例如,在工業自動化生產線中,對于需要快速調整運行參數的機器人手臂,CANFD的高傳輸速率能夠確保控制指令的即時下達與執行反饋的迅速獲取。
數據長度的擴展 CANFD將數據長度從8字節拓展至64字節,這一改進意義重大。以電動汽車的動力系統控制為例,車輛在行駛過程中,電池管理系統、電機驅動系統與車輛控制系統之間需要頻繁交換大量數據,包括電池狀態、電機轉速、扭矩等參數。CANFD的長數據幀特性使得這些數據可以在單幀內完整傳輸,減少了數據幀的傳輸數量,進而降低了總線負載,提高了系統的整體通信效率。
兼容性的保留 CANFD在幀格式上與傳統CAN保持高度兼容,這為系統的平滑升級提供了可能。企業無需對現有CAN網絡基礎設施進行大規模更換,僅需逐步替換或升級節點設備,即可實現向CANFD的過渡。同時,CANFD網絡能夠兼容傳統CAN節點,使得新舊系統可以在過渡期內協同工作,降低了企業的技術更新成本。
三、CANFD技術在實時運動控制系統中的性能測試
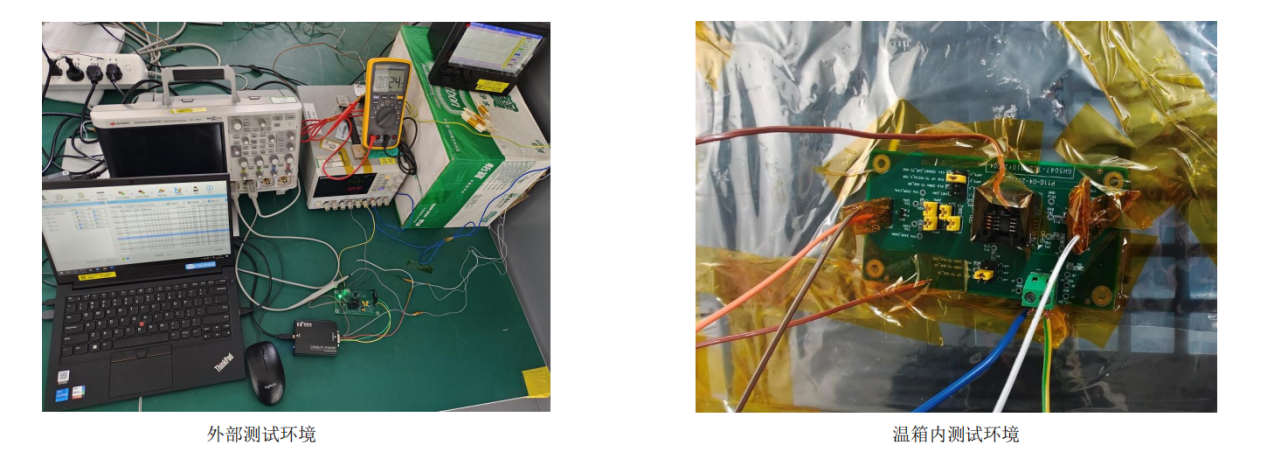
(一)測試環境搭建
節點配置 :將25個節點連接到同一CAN總線上,每個節點均配備ASM1042A型CAN-FD芯片。
通信速率設置 :分別設置通信速率為4kps、5Mbps和10Mbps,以測試不同速率下的通信可靠性。
數據傳輸測試 :在每個速率下,發送大量數據幀,并記錄接收幀的數量和錯誤幀的數量。
環境適應性測試 :在不同溫度條件下(常溫、-55℃、125℃)進行數據傳輸測試,以評估芯片在極端溫度下的性能。
__單粒子效應測試:__單粒子效應試驗采用皮秒脈沖激光單粒子效應試驗裝置,通過激光正面輻照芯片,模擬高能粒子對芯片的影響。

(二)性能測試指標與方法
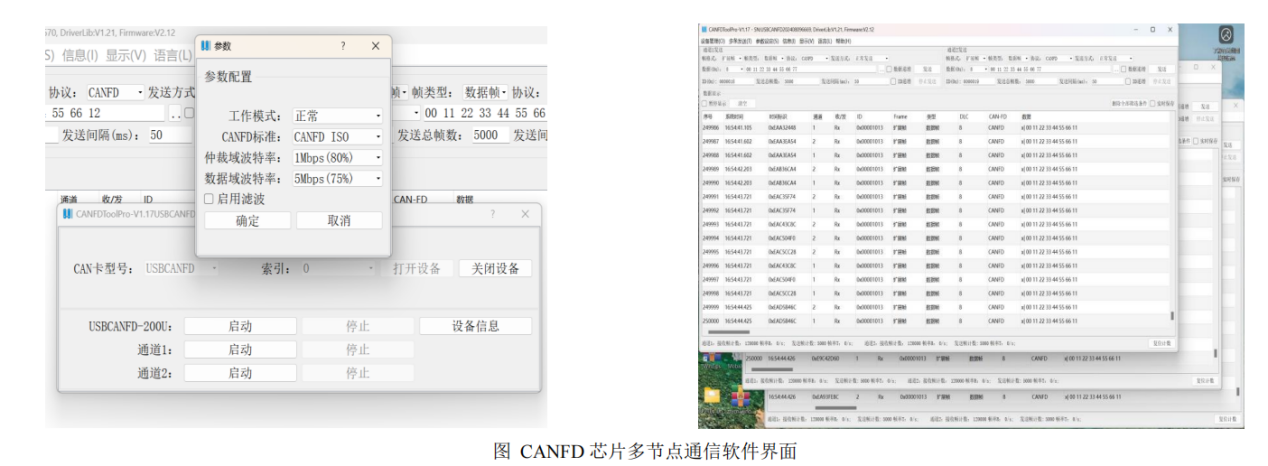
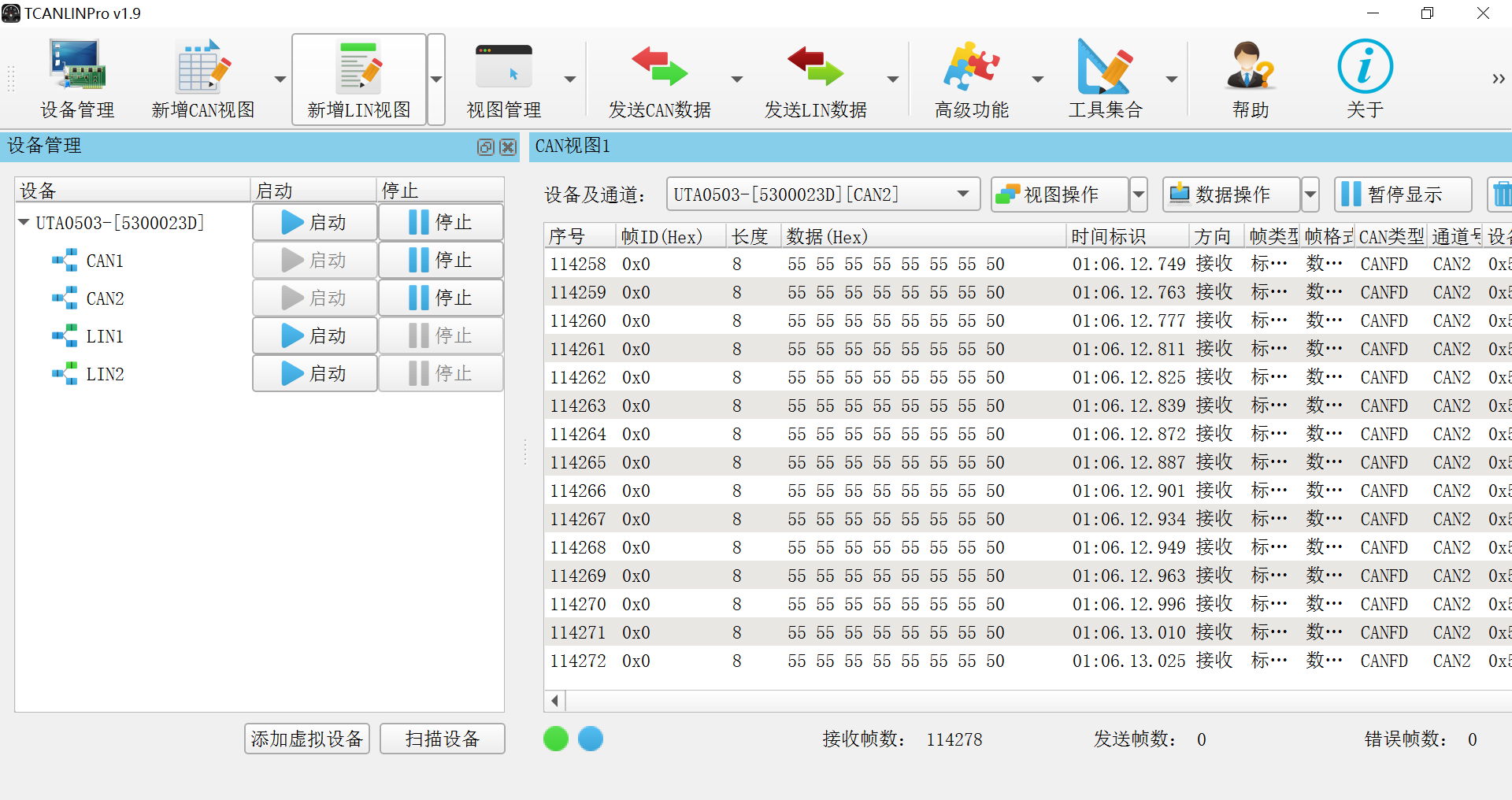
多節點通信測試 在評估ASM1042A型CAN-FD芯片在復雜通信環境中的性能。例如,在模擬汽車制造生產線的高速自動化場景中,對數據傳輸速率進行動態監測,驗證其是否能夠滿足生產線的實時數據交互需求。
數據完整性測試 在運動控制系統中,發送端節點發送包含特定控制指令與數據的CANFD幀,接收端節點接收并解析。通過對比發送與接收數據的一致性來驗證數據完整性。以工業機器人為例,在機器人執行復雜動作規劃時,對比控制器發送的運動軌跡數據與關節電機接收到的數據,確保數據在傳輸過程中無丟失或錯誤。
實時性測試 運用高精度計時器測量CANFD幀從發送端到接收端的傳輸延遲,以及系統對實時控制信號的響應時間。在實時性要求極高的數控機床加工場景中,微秒級的傳輸延遲可能直接影響加工精度。通過對CANFD總線的實時性測試,驗證其是否能夠滿足精密加工對控制信號快速響應的要求。
抗干擾能力測試 為了評估ASM1042S型CAN-FD芯片在空間環境中的可靠性,進行了環境適應性測試和單粒子效應脈沖激光試驗,模擬工業現場的實際干擾情況。通過監測CANFD總線的誤碼率、數據丟失率等指標,評估其抗干擾能力。
(三)測試結果分析
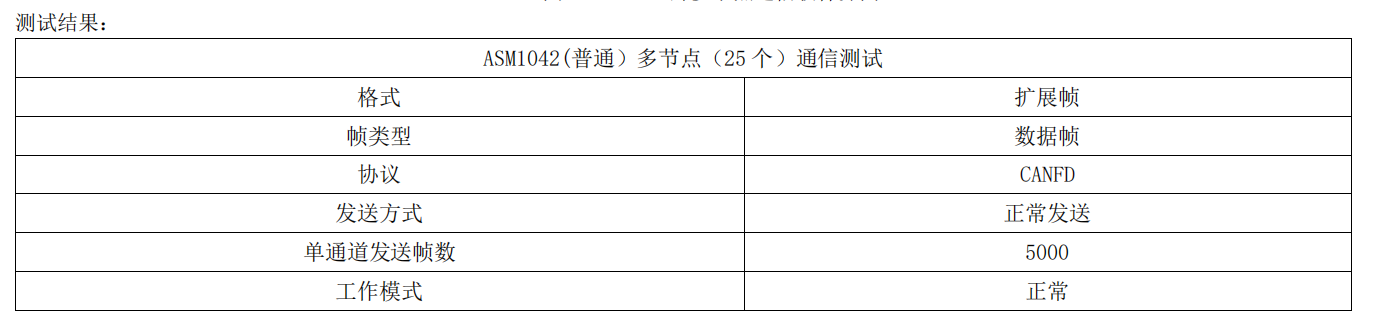
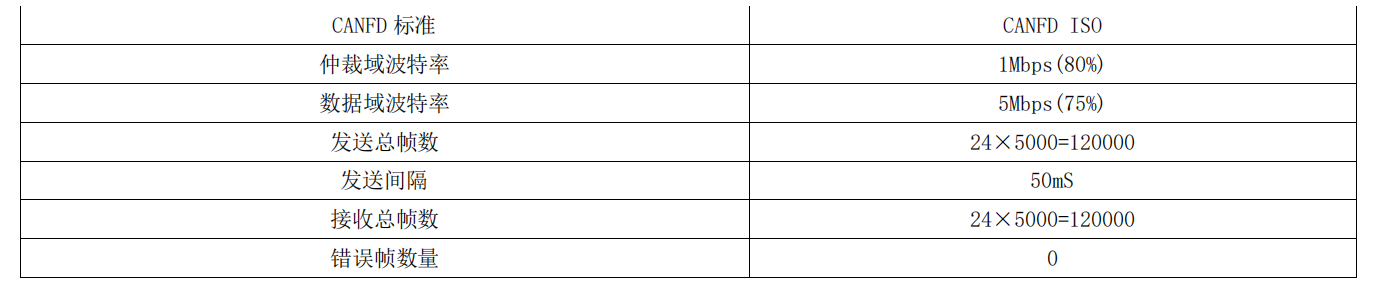
多節點數據傳輸性能:
測試結果顯示,ASM1042A型CAN-FD芯片在多節點(25個)通信測試下的數據傳輸性能如下:
環境適應性:
在不同溫度條件下,ASM1042A型CAN-FD芯片的通信性能如下:

常溫 :發送功能和接收功能均正常。
125℃ :發送功能和接收功能均正常。
-55℃ :發送功能和接收功能均正常。
測試結果顯示,ASM1042S型CAN-FD芯片在不同激光能量下的單粒子效應如下:
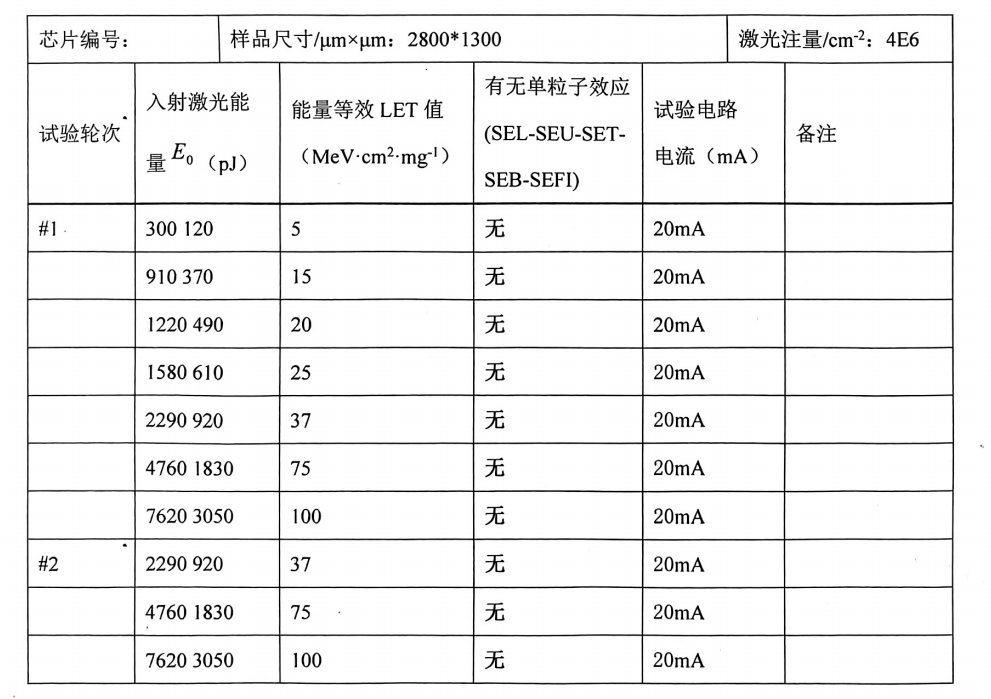
120pJ(LET值為5MeV·cm2/mg) :未出現單粒子效應。
370pJ(LET值為15MeV·cm2/mg) :未出現單粒子效應。
920pJ(LET值為37MeV·cm2/mg) :未出現單粒子效應。
3050pJ(LET值為100MeV·cm2/mg) :未出現單粒子效應。
四、CANFD技術的優勢與挑戰
(一)優勢
高效數據傳輸提升系統性能 在實時運動控制系統中,CANFD高效的數據傳輸特性能夠顯著提升系統性能。以自動化包裝生產線為例,生產線上的各種設備需要實時協調運行,CANFD能夠快速傳輸包裝速度、物料位置等數據,提高生產效率與包裝質量。
強大抗干擾能力保障系統穩定 CANFD的抗干擾能力使其在惡劣的工業環境中表現出色。在鋼鐵廠的自動化生產線上,大量的電磁設備同時運行,CANFD總線能夠穩定傳輸生產過程控制數據,確保鋼鐵生產的連續性與安全性。
良好兼容性降低升級成本 對于已采用傳統CAN協議構建的運動控制系統,CANFD的兼容性使得系統升級變得更加經濟可行。例如,在對舊工業機器人的控制系統進行升級改造時,利用CANFD的兼容性,可以逐步替換老舊部件,同時保留部分原有設備,降低了企業的技術升級成本。
(二)挑戰
網絡規劃與配置復雜性 隨著數據傳輸速率的提高,CANFD網絡的規劃與配置變得更為復雜。網絡拓撲結構設計、傳輸介質選擇以及節點參數配置都需要更加精細。不同廠商設備間的兼容性問題也可能導致系統集成困難。例如,在構建大型智能工廠的自動化控制系統時,面對眾多不同廠商的設備,需要投入大量時間和資源進行網絡規劃與設備兼容性測試。
實時性與確定性的更高要求 盡管CANFD提升了實時性,但在一些對時間精度要求極高的超精密運動控制系統中,仍需進一步優化。例如,在航空航天領域的高精度儀器制造中,多軸聯動的運動控制系統需要極高的同步精度與確定性,需要對CANFD協議進行深度定制與優化,以滿足系統要求。
安全性與可靠性保障難度 實時運動控制系統在關鍵基礎設施中的應用,如智能交通中的自動駕駛系統,對其安全性與可靠性要求極高。CANFD網絡需要具備強大的數據加密、身份認證以及故障診斷與冗余機制。然而,目前相關安全技術仍在不斷發展完善中,如何構建高安全、高可靠的CANFD網絡是亟待解決的問題。
五、CANFD技術在實時運動控制系統中的應用案例
(一)汽車制造生產線
在汽車制造生產線中,實時運動控制系統廣泛應用于車身焊接、涂裝、裝配等環節。CANFD技術的應用使得機器人手臂、自動化輸送帶、升降機等各種運動控制設備之間的通信更加高效、可靠。通過CANFD總線,控制系統的主控制器可以實時發送運動指令和參數給各個設備節點,同時接收設備的反饋信息,實現精確的運動控制和協調。例如,在車身焊接過程中,多個焊接機器人需要同步工作,以確保焊接質量和效率。CANFD技術的低延遲和高數據傳輸速率特性能夠確保焊接機器人之間的同步精度,提高焊接質量,降低生產成本。
(二)工業機器人
工業機器人是實時運動控制系統的典型應用之一,其對通信系統的實時性、準確性和可靠性有著極高的要求。CANFD技術在工業機器人中的應用,使得機器人的關節電機、末端執行器、傳感器等部件之間的通信更加順暢。機器人控制器可以通過CANFD總線實時獲取關節電機的位置、速度、扭矩等狀態信息,并根據實時任務需求發送控制指令,實現機器人的精準運動控制和復雜動作規劃。此外,CANFD的高抗干擾能力也有助于工業機器人在復雜的工業環境中的穩定運行,提高生產效率和產品質量。
(三)電動汽車
在電動汽車中,實時運動控制系統用于電池管理系統、電機驅動系統、制動系統等關鍵部件的控制和監測。CANFD技術可以實現這些系統之間的高速、可靠通信,確保車輛的安全運行和性能表現。例如,在電機驅動系統中,CANFD總線可以實時傳輸電機的控制信號和狀態信息,實現對電機的精確控制和故障診斷。同時,在電動汽車的自動駕駛系統中,CANFD技術也為傳感器、控制器和執行器之間的通信提供了支持,助力實現更高級別的自動駕駛功能。
六、未來發展趨勢
(一)技術融合與創新
隨著工業物聯網(IIoT)、大數據、人工智能等新興技術的快速發展,CANFD技術將與這些技術深度融合,實現更智能的運動控制系統。例如,通過將傳感器數據通過CANFD總線傳輸到云端,利用大數據分析和人工智能算法對數據進行處理和分析,可以實現對運動控制系統的實時優化和故障預測。此外,CANFD技術還將與其他現場總線技術、工業以太網技術等進行融合,構建更加靈活、高效的通信網絡架構,滿足不同應用場景下的多樣化需求。
(二)功能增強與性能提升
未來,CANFD協議將繼續演進,進一步增強其功能和性能。一方面,將提高數據傳輸速率的上限,以滿足日益增長的數據傳輸需求。另一方面,將優化協議的實時性和確定性,通過引入更先進的調度算法和數據傳輸機制,確保運動控制系統的精確同步和實時響應。此外,還將加強CANFD技術的安全性和可靠性,開發更強大的加密、認證和冗余機制,以應對網絡安全威脅和系統故障風險。
(三)應用拓展與市場增長
隨著智能制造、智能交通、機器人技術等領域的發展,CANFD技術的應用范圍將不斷擴大。除了傳統的汽車制造、工業自動化等領域,將在航空航天、船舶制造、物流運輸、智能建筑等新興領域得到廣泛應用。這將推動CANFD芯片、控制器、傳感器等相關產品的市場需求持續增長,促進相關產業的快速發展。
七、結論
CANFD技術憑借其高效的數據傳輸、強大的抗干擾能力、良好的兼容性等優勢,在實時運動控制系統中得到了廣泛應用。通過對CANFD協議的解析和性能測試,驗證了其在實時性、數據完整性、抗干擾性等方面的優勢,同時也揭示了在網絡規劃、實時性優化、安全性保障等方面面臨的挑戰。隨著技術的不斷融合與創新、功能的增強與性能的提升以及應用的拓展與市場的增長,CANFD技術將在未來實時運動控制系統中發揮更加重要的作用,為工業自動化、機器人技術、智能交通等領域的發展提供有力支持。
審核編輯 黃宇
-
運動控制系統
+關注
關注
0文章
94瀏覽量
14370 -
CANFD
+關注
關注
0文章
81瀏覽量
5294
發布評論請先 登錄





 工商網監
工商網監
評論