 阿普奇雙腦架構:多場景多形態具身智能機器人的可靠智腦
阿普奇雙腦架構:多場景多形態具身智能機器人的可靠智腦

2025年被視為人形機器人商業化落地的關鍵元年。特斯拉宣布Optimus機器人將于年內小規模投產,優先用于工廠重復性勞動場景,并計劃2026年實現量產;國內企業如智元、優必選、宇樹科技等也在加速布局,優必選Walker S1已在比亞迪、富士康等工廠實訓,在實際應用中實現了物流搬運效率的大幅提升。機器人行業是顯著的需求端驅動型產業,例如老齡化加劇催生“機器換人”,而工業制造、家庭服務、醫療康養等場景持續拓寬,具身智能機器人正從“實驗室奇觀”邁向“產業剛需” 。
從娛樂表演到工業制造,從科研教育到公共服務,在分化趨勢下,具身智能機器人可以主要分為泛娛樂型、科研教育型、工業型、商用服務型四大應用方向,在不同場景中,機器人的形態、身高、功能、成本都會隨著場景應用需求而變化。
泛娛樂型人形機器人:少硬件、輕算力——“性價比至上”
泛娛樂型人形機器人聚焦基礎舞蹈表演、導引服務及情感交互場景,其核心競爭力在于外觀設計與交互體驗的平衡:采用仿生皮膚與可變裝設計提升親和力,功能模塊相對簡化,無需復雜運動控制。通過預置算法優化核心交互功能(如動作編排與語音響應),在輕量化算力支持下即可實現流暢運行。
(2025中國人形機器人生態大會暨智能機器人與未來科技展上展出的“美女機器人”引眾人關注)
科研教育型人形機器人:高算力、高性能——“兼顧功能與預算”
科研教育型人形機器人弱化外觀擬真,更傾向于全尺寸設計,盡可能地還原真實人體力學,其核心價值在于構建模塊化開發平臺,支持關節自由度拆解與多模態算法驗證。其設計重點聚焦運動控制精度與算力可擴展性,為步態規劃、動力學建模等研究提供標準化硬件載體。

(全尺寸科研教育人形機器人“天工行者 ”亮相第85屆中國教育裝備展示會)
工業型人形機器人:高精度、高價值——“追求穩定與可靠”
工業型人形機器人延續工業自動化設備的可靠性標準,要求較高的響應精度、極長的無故障運行時間,并滿足嚴苛的防護等級與寬溫域運行能力。相比傳統SCARA/Delta機器人,其核心優勢在于適配非結構化作業場景:例如在汽車裝配線完成座椅螺栓復緊、在狹小空間設備檢修、在農業果林完成采摘等需仿人靈活性的任務。

(2025中國人形機器人生態大會暨智能機器人與未來科技展上“工業人形機器人”展示搬運作業能力)
服務型人形機器人:多變化、強互動——“考驗適配能力”
商用服務型人形機器人需支持多模態功能切換,如在酒店接待場景中,需要集成語音交互、載重搬運與自主避障;室內清潔應用場景中,需要在移動過程中完成物品識別并清潔的作業任務;而在文博導覽的實際應用中,需要理解多種語義以及具備專業導覽知識圖譜,以便更好地為人們提供服務。

(奇瑞推出的墨甲人形機器人"莫茵"亮相,已在4s店幫忙賣車)
商用服務型人形機器人因場景多樣性需持續提升環境適應能力、任務泛化能力及智能決策水平,同時在高頻人機交互場景中,安全性能(如避障響應速度、接觸力控制精度)需滿足嚴苛標準。
阿普奇KiWiBot系列:“雙腦協同”架構的技術支持
面對場景分化,阿普奇針對具身機器人控制器存在的集成度低、算力分散、響應延遲等行業痛點,創新推出以KiWiBot系列為代表的"核心大小腦"產品方案,該方案通過感知決策與運動控制的雙腦協同設計,采用邊緣計算與實時系統結合,實現多模態數據高效處理與毫秒級精準控制,在緊湊型封裝內完成感知-決策-執行閉環,兼顧高算力密度與低功耗特性,其模塊化架構顯著提升了系統可靠性和復雜場景適應能力。
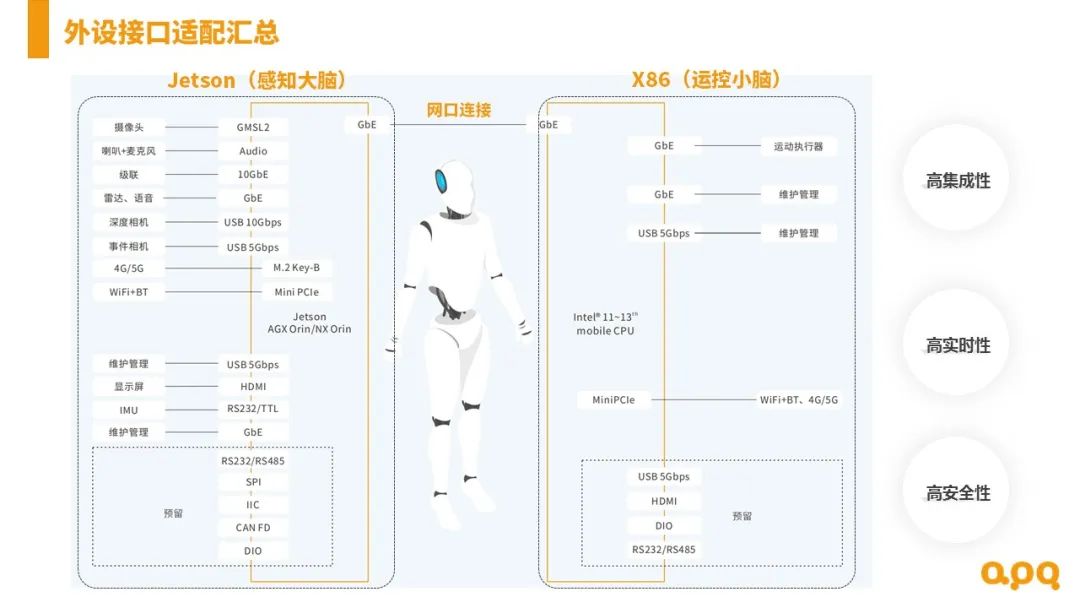
●感知大腦:搭載NVIDIA Jetson AGX Orin芯片,提供275TOPS算力,可并行處理多路攝像頭數據流,支持多模態感知與智能決策;
●運控小腦:采用Intel x86處理器,依托EtherCat實現數據高速互通,支持多軸伺服電機的力矩閉環控制,縮短控制周期,較傳統CAN總線速率提升顯著。
阿普奇核心大小腦產品方案基于以下優勢,使其能夠靈活適配不同場景下多形態具身智能機器人的應用需求:
雙域融合架構:
1. 感知與運控雙域協同,支持大模型推理與高精度運動控制并行運行,有效提高算力分配效率;
2. 通過自研熱管-鰭片復合散熱系統,在-20℃~60℃環境中保持穩定運行,散熱效率顯著提升。
實時性與可靠性:
1. 搭載IPC小助手、云控手等IPC+工具鏈,實時監測設備參數,系統穩定性較傳統方案有顯著提高;
2. 采用狀態自感知技術,支持設備健康度動態評估,大幅降低運維成本。
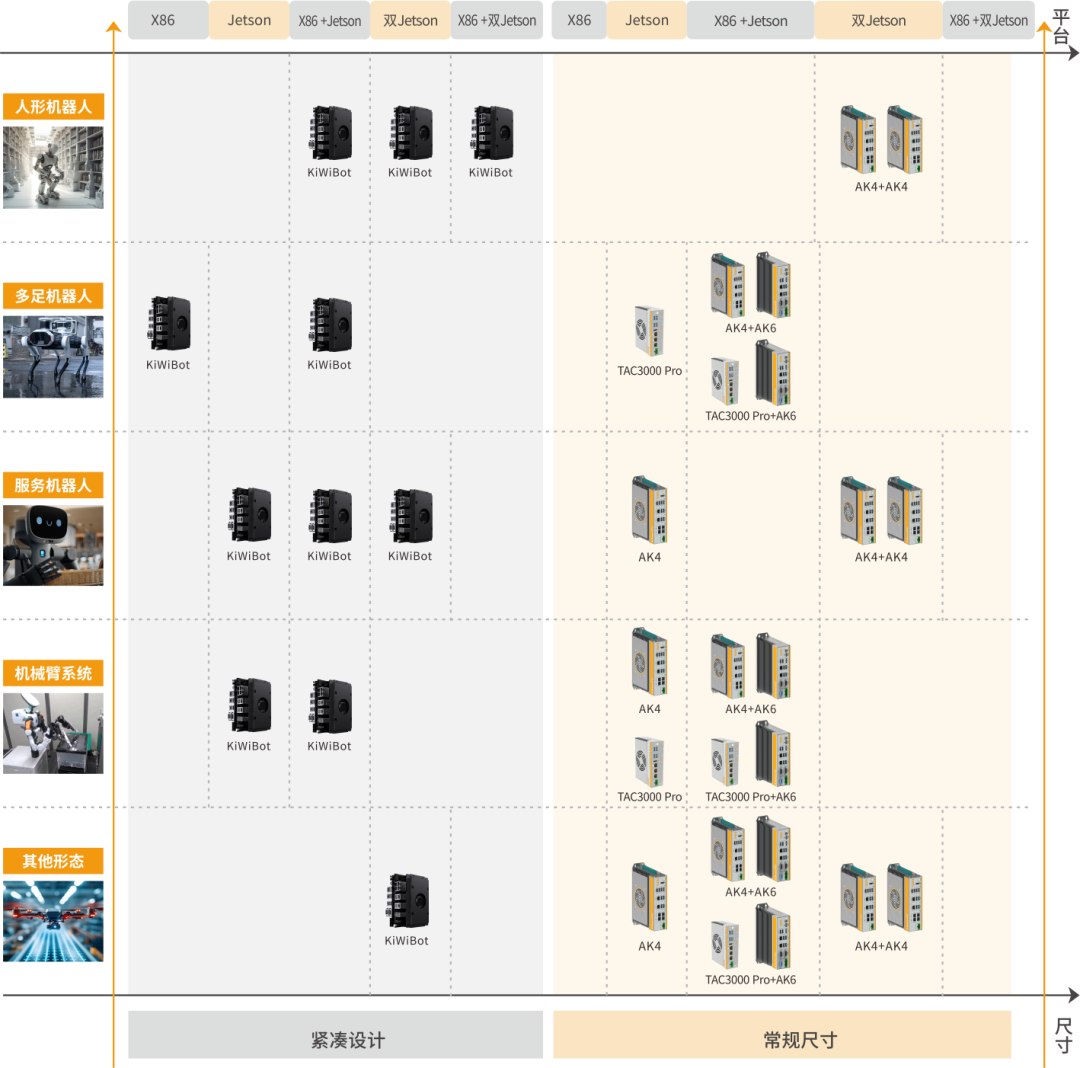
阿普奇作為國內具身智能機器人核心控制器領域的專業供應商,依托深厚的技術積淀與行業洞察,構建起多模態計算平臺解決方案。基于x86、NVIDIA Jetson及其組合架構(如x86+Jetson/雙Jetson),通過緊湊型結構設計與高密度接口布局,形成差異化場景適配能力,精準匹配主流廠商在運動控制、環境感知、決策推理等維度的研發需求,目前已為多家國內知名機器人廠商達成穩定合作。
從實驗室到工業場景、商業環境甚至是手術室,人形機器人正以場景分化為軸,推動核心控制系統的革新。阿普奇KiWiBot系列通過“雙腦協同”架構與模塊化設計,不僅解決了多場景適配難題,更以創新性的技術突破加速商業化進程。隨著政策支持與生態協同的深化,2025年或將成為人形機器人從“技術驗證”邁向“規模落地”的歷史拐點。
審核編輯 黃宇
-
機器人
+關注
關注
213文章
29650瀏覽量
212311 -
智能機器人
+關注
關注
17文章
898瀏覽量
84443 -
阿普奇
+關注
關注
0文章
14瀏覽量
180
發布評論請先 登錄

阿普奇攜KiWiBot 30控制器亮相具身智能大會,賦能場景化落地

從感知到運控:具身智能機器人控制器的雙腦協同設計與場景適配
具身智能機器人控制器的創新未來需要高效、可靠、易用的控制方案
阿普奇受邀參加蘇州市具身智能機器人產業生態大會,現場簽約重點項目

【「具身智能機器人系統」閱讀體驗】+兩本互為支持的書
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】1.全書概覽與第一章學習
《具身智能機器人系統》第7-9章閱讀心得之具身智能機器人與大模型
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
阿普奇榮獲年度優秀供應鏈企業:2024年人形機器人行業的高光時刻





 工商網監
工商網監
評論