") 一步到位,Moku數(shù)字PID控制器實(shí)現(xiàn)系統(tǒng)實(shí)時(shí)調(diào)節(jié)與驗(yàn)證
一步到位,Moku數(shù)字PID控制器實(shí)現(xiàn)系統(tǒng)實(shí)時(shí)調(diào)節(jié)與驗(yàn)證

PID控制被廣泛應(yīng)用于實(shí)驗(yàn)控制和工業(yè)自動(dòng)化系統(tǒng)中,但在實(shí)際調(diào)試中,傳統(tǒng)的PID控制器往往需要大量計(jì)算與經(jīng)驗(yàn)積累,調(diào)節(jié)過程既繁瑣又耗時(shí)。而通過使用Moku:Pro的數(shù)字PID控制器,您可以根據(jù)增益曲線圖以實(shí)時(shí)動(dòng)態(tài)地方式進(jìn)行參數(shù)調(diào)節(jié),并使用內(nèi)置的示波器即時(shí)觀察響應(yīng)信號(hào)。以更加直觀、實(shí)時(shí)的方式實(shí)現(xiàn)系統(tǒng)調(diào)節(jié)。比起傳統(tǒng)反饋系統(tǒng),這使得通過實(shí)際觀察來調(diào)節(jié)控制器更加容易,并且無需用戶進(jìn)行大量的計(jì)算。
我們有一篇非常詳細(xì)的關(guān)于頻域控制的講解手冊(cè),如果您感興趣,歡迎聯(lián)系昊量光電。
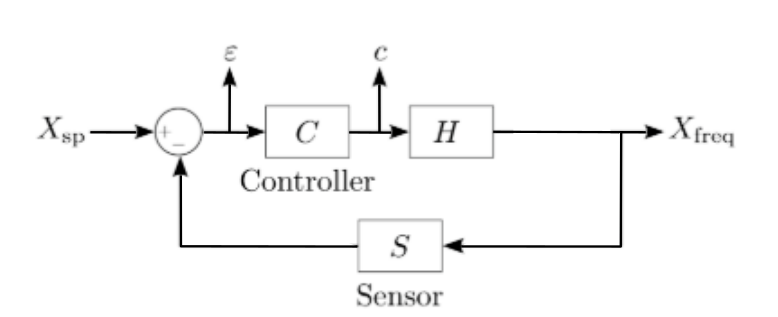
圖1:典型反饋系統(tǒng)框圖
如圖1所示是一個(gè)典型的反饋控制系統(tǒng)框圖。其中Xsp表示輸入設(shè)定點(diǎn),C表示控制器,H表示受控系統(tǒng),Xfreq表示系統(tǒng)的輸出頻率。在我們的反饋回路中,S表示用于測(cè)量系統(tǒng)輸出的傳感器。通過將此輸出與期望的設(shè)定點(diǎn)進(jìn)行比較,控制器可以補(bǔ)償系統(tǒng)輸出的變化。 這里,設(shè)定點(diǎn)與系統(tǒng)輸出之間的差值就是誤差信號(hào)ε。如果傳感器輸出與設(shè)定點(diǎn)一致,則誤差信號(hào)為零。如果輸出大于期望設(shè)定點(diǎn),則誤差為負(fù)值,控制器根據(jù)此時(shí)的誤差值來降低輸出進(jìn)行調(diào)控。
調(diào)節(jié)反饋控制系統(tǒng)的方法多種多樣。在本例中,我們將通過Moku:Pro的#多儀器并行模式,你可以輕松將PID控制器與數(shù)字濾波器、示波器和波形發(fā)生器集成,構(gòu)建一個(gè)完整的控制與測(cè)試平臺(tái),演示如何實(shí)時(shí)調(diào)節(jié)數(shù)字PID控制器。首先,輸入一個(gè)單位階躍信號(hào),觀察系統(tǒng)的單位階躍響應(yīng)信號(hào),并在觀察的同時(shí)調(diào)整P、I和D參數(shù),以達(dá)到想要的調(diào)控效果。為了模擬被控系統(tǒng),我們使用Moku:Pro配置“多儀器并行“模式(圖2),部署數(shù)字濾波器并配置為100 Hz截止頻率的二階低通濾波器(圖3)。最后,使用示波器內(nèi)置的波形發(fā)生器產(chǎn)生方波信號(hào)作為階躍輸入信號(hào)(圖4)。
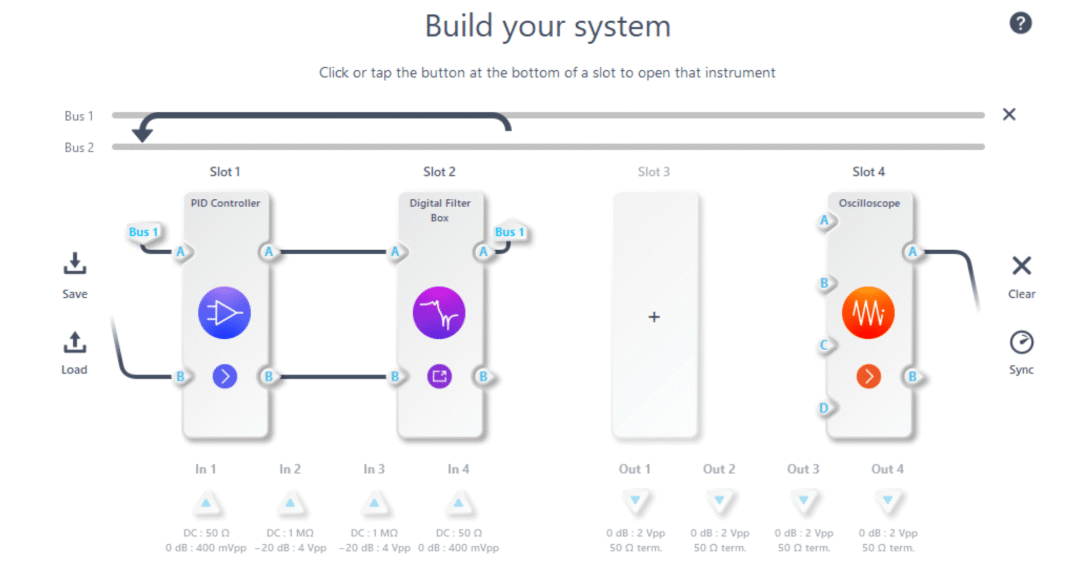
圖2:在多儀器并行模式下部署數(shù)字濾波器替代反饋控制回路里的受控系統(tǒng)
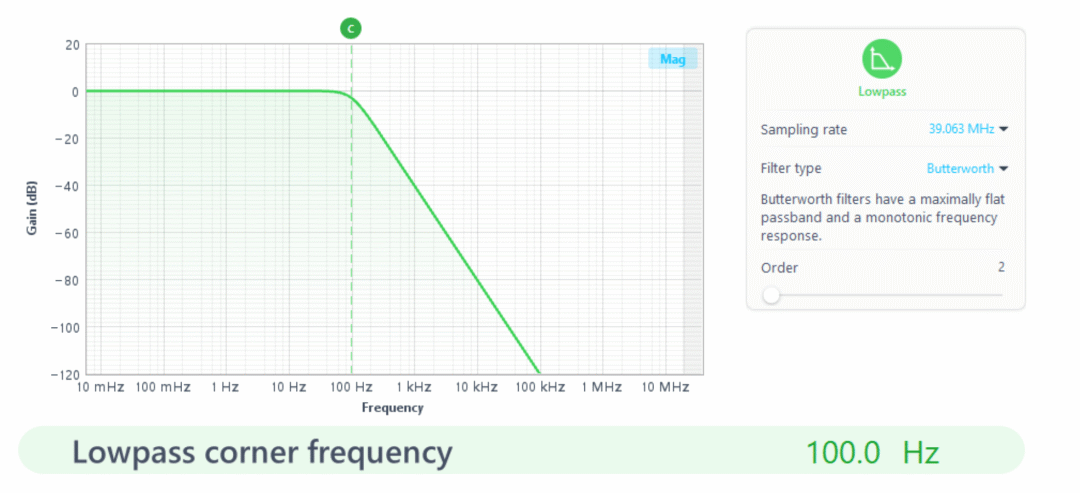 圖3:數(shù)字濾波器盒低通濾波器配置
圖3:數(shù)字濾波器盒低通濾波器配置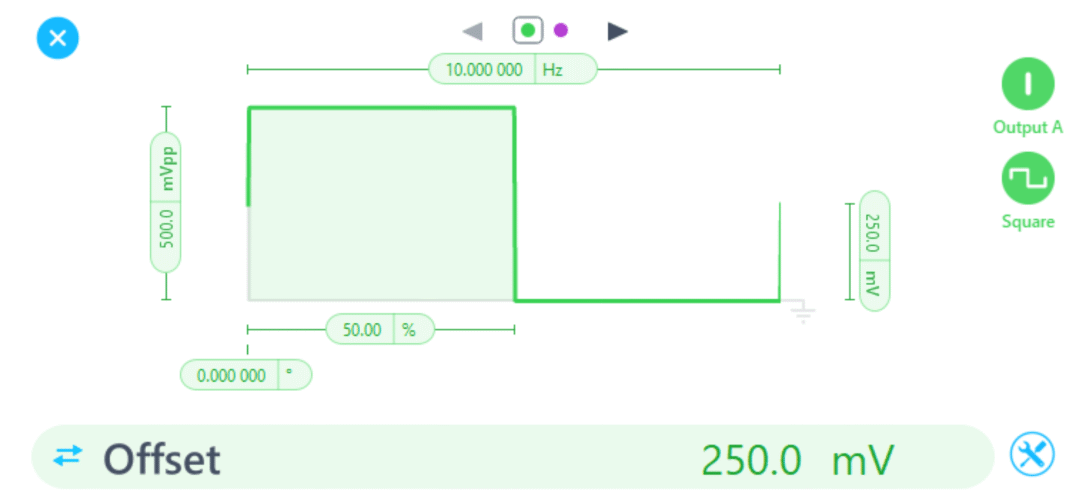 圖 4: 使用內(nèi)置的波形發(fā)生器產(chǎn)生階躍信號(hào)
圖 4: 使用內(nèi)置的波形發(fā)生器產(chǎn)生階躍信號(hào)
連接實(shí)驗(yàn)系統(tǒng)
1. 如圖1所示,Moku:Pro的PID控制器作為反饋控制回路里的控制器與受控系統(tǒng)相連。
2. 確保輸入信號(hào)(即傳感器輸出信號(hào)與設(shè)定點(diǎn)Xsp信號(hào)之間的差值)和輸出的控制信號(hào)(即圖1中控制器的輸出)配置正確連接。將傳感器反饋信號(hào)連接到Moku:Pro的輸入1端口。將Moku:Pro的輸出1端口連接到您的受控系統(tǒng),H的調(diào)節(jié)輸入口。此調(diào)節(jié)輸入信號(hào)可以用于壓控振蕩器(VCO)、激光調(diào)制輸入或電機(jī)控制器的調(diào)控。 3. 如圖5所示,通過單擊用于調(diào)節(jié)的控制器單元模塊來打開增益視圖,同時(shí)單擊在Moku:Pro PID控制器內(nèi)位于輸入和輸出側(cè)的信號(hào)監(jiān)測(cè)點(diǎn)來激活內(nèi)置的示波器功能。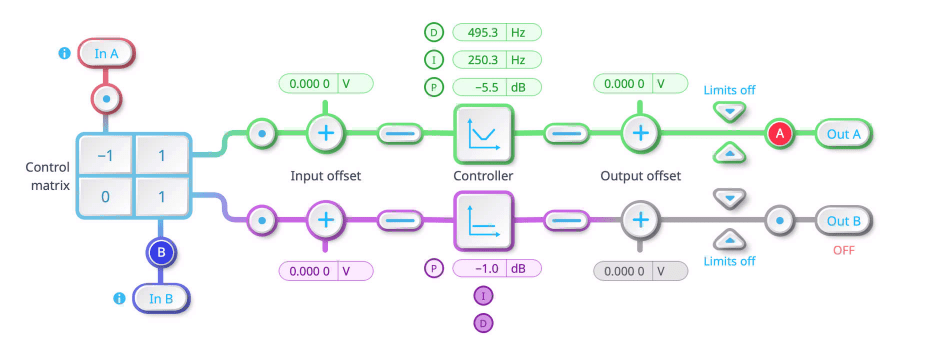
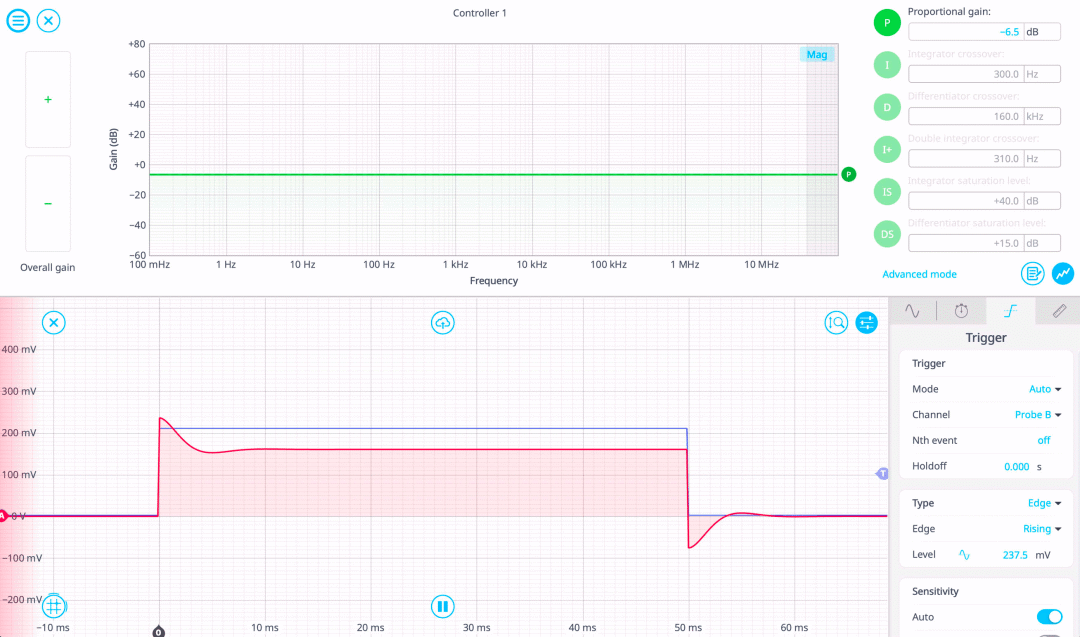
圖5:上面是Moku PID控制器的信號(hào)處理框圖,下面是內(nèi)置的示波器顯示界面
使用Moku:Pro內(nèi)置的PID控制器時(shí),你可以在圖形化界面中拖動(dòng)增益曲線圖來直接調(diào)節(jié)比例(P)、積分(I)、微分(D)參數(shù),并通過示波器實(shí)時(shí)觀察輸出響應(yīng)。相比傳統(tǒng)方法,這種可視化交互式調(diào)試方式省去了大量推導(dǎo)與反復(fù)試錯(cuò)。
第一步
|比例參數(shù)(P)
圖6:關(guān)閉I參數(shù)和D參數(shù),單獨(dú)增加P參數(shù)
1. 開始時(shí),我們關(guān)閉 I參數(shù)和D參數(shù)。
2. 通過拖動(dòng)視圖右側(cè)小圖標(biāo)來調(diào)節(jié) P參數(shù),直至系統(tǒng)響應(yīng)開始變快。3. 在示波器上觀察輸出信號(hào),如果系統(tǒng)輸出發(fā)生劇烈振蕩,慢慢往回調(diào)節(jié) P參數(shù)。
第二步
|積分參數(shù)(I)消除穩(wěn)態(tài)誤差
1. 如圖7所示,逐步增加I參數(shù)可消除穩(wěn)態(tài)誤差。
圖7: P參數(shù)減小后,微調(diào)I參數(shù)
2.通過示波器觀察是否過沖— I參數(shù)過大會(huì)造成系統(tǒng)過度振蕩。如圖8所示,增大I參數(shù)到300 Hz,我們會(huì)發(fā)現(xiàn)系統(tǒng)振蕩十分明顯。
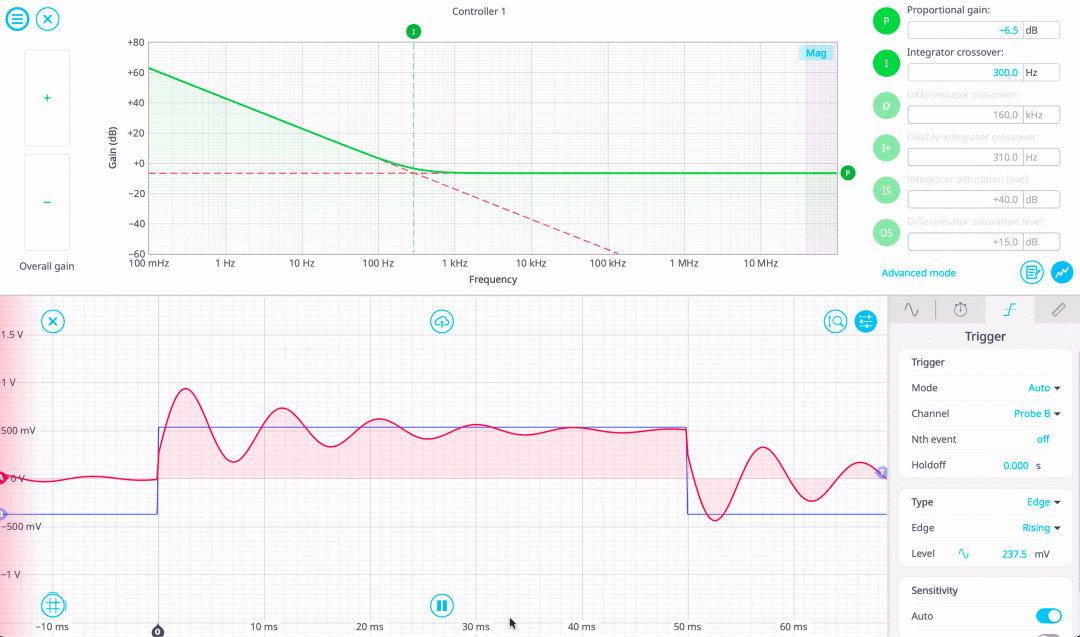
圖8:系統(tǒng)振蕩隨著I參數(shù)增大而增大。
3.如果系統(tǒng)振蕩增大,可以考慮略微減小P參數(shù)。
第三步
|微分參數(shù)(D)提升調(diào)控穩(wěn)定度
1. 如圖 9所示,設(shè)定D參數(shù),緩慢增加來減少過沖,并抑制振蕩。
圖9:設(shè)定好P參數(shù)和I參數(shù)后,設(shè)定D參數(shù)到100 Hz
2.這里注意— D參數(shù)不佳會(huì)因?yàn)楦哳l信號(hào)被放大造成系統(tǒng)噪聲變大。我們可以激活微分飽和參數(shù)來限制高頻增益。
3.最后,一邊調(diào)節(jié)P、I和D參數(shù),一邊觀察示波器上的信號(hào),最終獲得最佳的調(diào)控效果。
我們可以采用微調(diào)方式加上在示波器上實(shí)時(shí)觀察階躍響應(yīng)來進(jìn)一步精確調(diào)節(jié)。通過使用示波器內(nèi)置的測(cè)量功能,我們也能同時(shí)對(duì)上升時(shí)間、過沖、下沖等進(jìn)行監(jiān)測(cè),然后可以按需將這些檢測(cè)信息記錄到一個(gè)文件內(nèi)。這些測(cè)量軌跡可以導(dǎo)出并轉(zhuǎn)換成.MAT類型的文件,然后在MATLAB中被用作后續(xù)分析處理。我們也可以按需設(shè)置PID控制器輸出側(cè)的限壓器來保護(hù)下一級(jí)受控單元,濾波器,或者調(diào)整采樣率來提高穩(wěn)定度。如果要實(shí)現(xiàn)級(jí)聯(lián)控制器,我們可以使用Moku:Pro的多儀器并行模式。
聯(lián)系昊量光電獲取《Moku PID控制器調(diào)參方法快速指南》,您還可以結(jié)合經(jīng)典調(diào)節(jié)技巧如:
Ziegler-Nichols方法:快速獲取臨界增益與振蕩周期,進(jìn)行初步參數(shù)設(shè)置
響應(yīng)導(dǎo)向法:先調(diào)P,再加I,最后加D,優(yōu)化過沖與穩(wěn)態(tài)誤差
頻域調(diào)節(jié)法:通過系統(tǒng)增益與相位裕度調(diào)節(jié)提高魯棒性
通過Moku將多個(gè)功能模塊整合在一個(gè)平臺(tái),我們提供了一種全新、直觀的方式來調(diào)節(jié)閉環(huán)控制系統(tǒng)。無需額外的硬件成本即可讓傳統(tǒng)復(fù)雜的控制器調(diào)節(jié)流程變得直觀、高效、精確。實(shí)驗(yàn)室教學(xué)也變得簡(jiǎn)單,學(xué)生可通過GUI觀察系統(tǒng)響應(yīng),直觀理解反饋控制原理。
-
控制器
+關(guān)注
關(guān)注
114文章
17086瀏覽量
183977 -
PID
+關(guān)注
關(guān)注
37文章
1482瀏覽量
87898 -
工業(yè)自動(dòng)化
+關(guān)注
關(guān)注
17文章
2720瀏覽量
68296
發(fā)布評(píng)論請(qǐng)先 登錄
新人求教步進(jìn)電機(jī)PI調(diào)節(jié)是一步到位還是漸進(jìn)的呢?
PID控制器算法在閉環(huán)系統(tǒng)中的調(diào)節(jié)
基于SOPC的多通道智能PID控制器
基于SOPC的多通道智能PID控制器
多級(jí)數(shù)字光圈控制器的設(shè)計(jì)和實(shí)現(xiàn)
數(shù)字一體機(jī) 是一步到位的選擇?
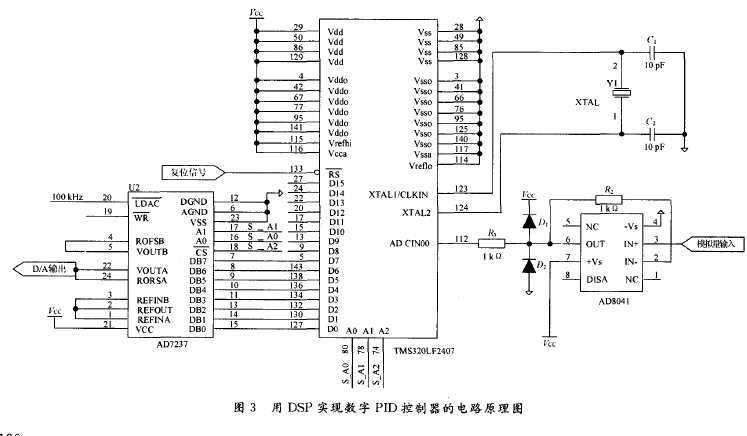
如何使用DSP進(jìn)行數(shù)字PID控制器的設(shè)計(jì)
5G套餐預(yù)約千萬,運(yùn)營(yíng)商的5G套餐很難一步到位
小米宣布:智能門鎖Pro的slogan是“前鎖未見,一步到位”
Moku:Go PID控制器實(shí)驗(yàn)案例
工業(yè)級(jí)可拆卸智能安全帽,讓企業(yè)數(shù)字化現(xiàn)場(chǎng)作業(yè)升級(jí)一步到位!

Moku:Go 實(shí)驗(yàn)案例分享-PID控制器實(shí)驗(yàn)







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論