 步進電機在高速運行時反電動勢波形與其動態響應變化
步進電機在高速運行時反電動勢波形與其動態響應變化

BEMF的產生:步進電機旋轉時,線圈在磁場中切割磁感線產生反電動勢(BEMF),其本質是阻礙電流變化的感應電壓
1. 反電動勢波形在高速下的變化
(1) 幅值隨轉速線性增大
當轉速從15 rpm升至30 rpm時,反電動勢峰值顯著增加。這是因為反電動勢公式為 E = ke × N × ω (ke?為反電動勢常數,N為定子繞組匝數,ω為角速度),轉速越高,BEMF幅值越大 。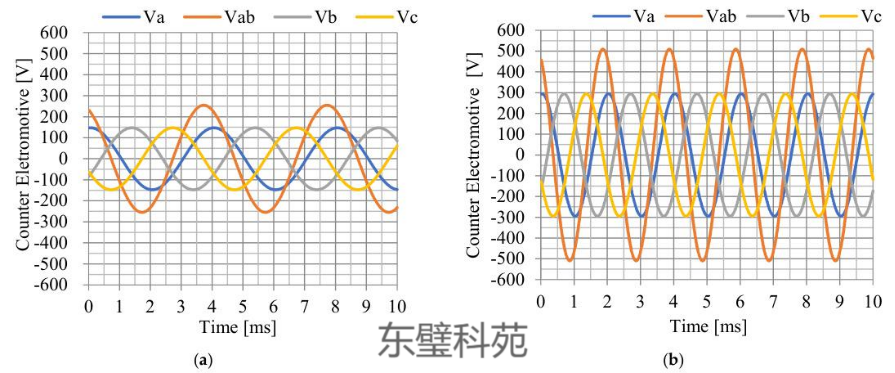
步進電機轉子齒數通常為50-100齒(如1.8°步進電機含50齒),相同轉速下單位時間磁場切割次數是伺服電機的6-12倍,導致BEMF幅值顯著升高。
(2) 波形頻率升高,周期縮短
轉速從900 rpm升至1800 rpm時,BEMF波形周期數增加,頻率翻倍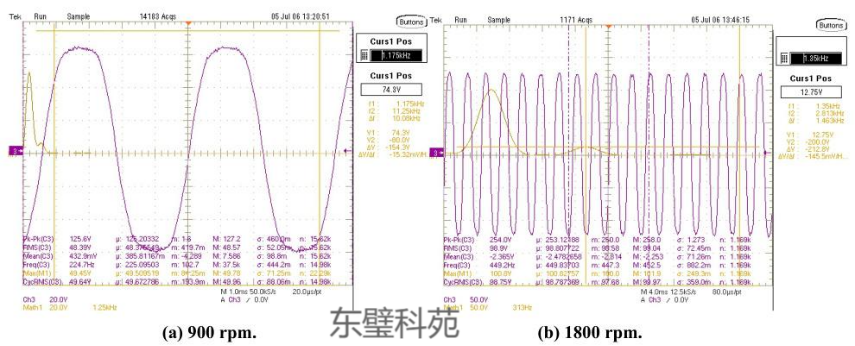
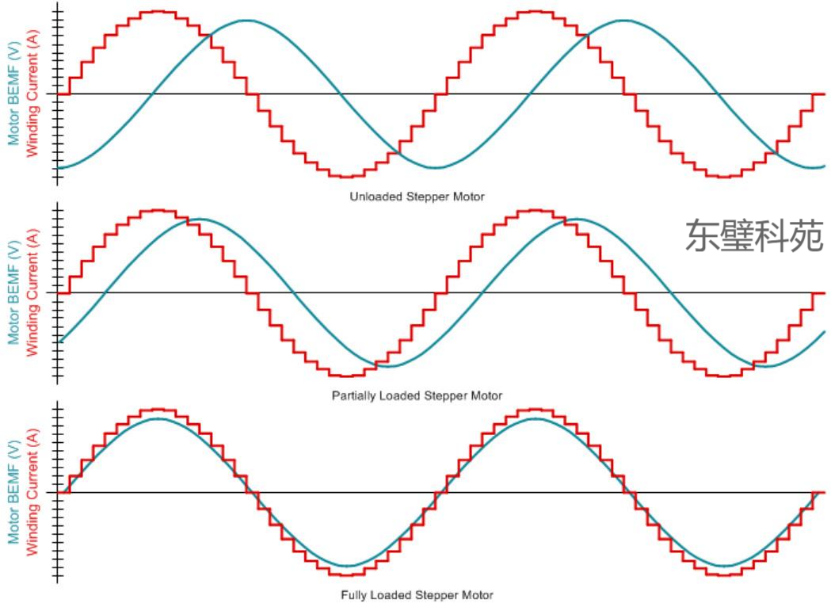
(3)相位變化
高速運行導致BEMF與電流相位差? 增大 (感性負載相位滯后加劇),而重載會使相位差?減小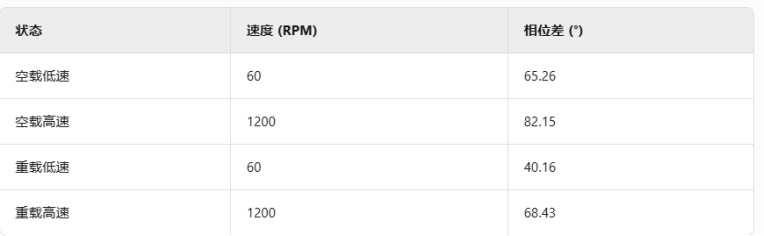
2. 反電動勢對動態響應的影響
(1) 電流建立延遲,扭矩下降
當電機高速運行時,BEMF可能接近甚至超過母線電壓(即驅動器供電電壓)。若BEMF ≥ 母線電壓,驅動器無法提供足夠電壓差驅動電流,導致電流下降。當BEMF接近母線電壓時,驅動器需100%占空比才能產生正向電流。但實際PWM存在死區時間(Dead Time),導致有效電壓仍低于BEMF,電流持續衰減。PWM飽和后,電流控制器無法輸出更高電壓指令,電流反饋值持續低于目標值,扭矩隨之崩潰。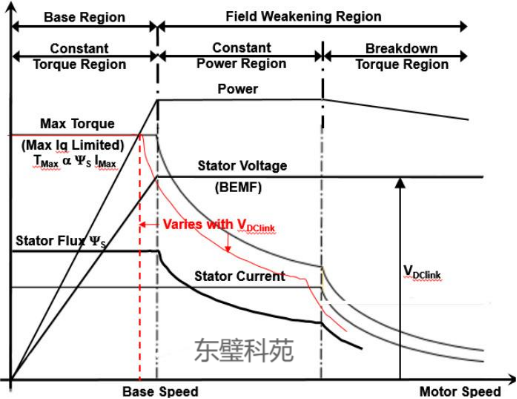
(2) 動態響應滯后
步進電機在高速時,(Vbus??Ebemf?) 電壓裕量減小,導致電流上升率下降,換向延遲,動態響應變慢 。
3.結論
步進電機高速運行時,反電動勢幅值增大、頻率升高,導致電流建立延遲、扭矩下降及動態響應滯后。所以在步進電機高速運行的方案中,我們需要通過優化電機選型(如低電感、適中極數)、升壓驅動及BEMF反饋控制,可緩解高速性能衰減,避免PWM飽和導致的扭矩崩潰。
審核編輯 黃宇
-
步進電機
+關注
關注
152文章
3165瀏覽量
149442
發布評論請先 登錄






 工商網監
工商網監
評論