 磁致伸縮位移傳感器簡介
磁致伸縮位移傳感器簡介

1 引言
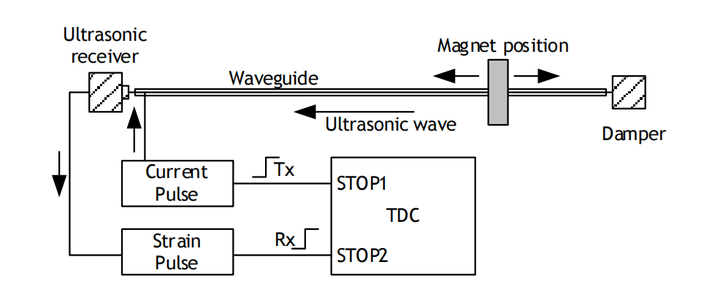
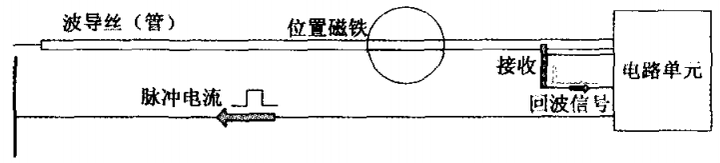
磁致伸縮線性位移傳感器利用磁致伸縮效應進行位置傳感。其組成包括鐵磁波導、位置磁體、阻尼區、應變脈沖轉換器和測量電子器件。
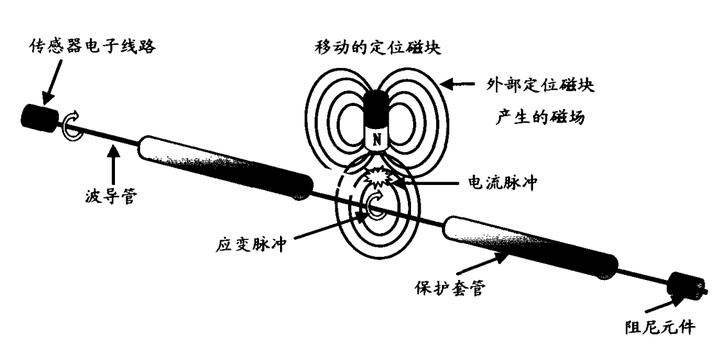
當向波導施加短電流脈沖時,會產生徑向磁場。與可移動機械部件相連的位置磁體,會在波導上的對應位置產生磁場。
兩個磁場的瞬時相互作用會產生扭轉應變脈沖,該脈沖沿波導向兩端傳播。為避免測量干擾,應變脈沖和電流脈沖會在波導末端被阻尼。返回測量電子器件方向的應變脈沖,會被應變脈沖轉換器中的拾波線圈轉換為電信號。
由于超聲波的傳播速度已知,通過測量施加電流脈沖與接收到電信號的時間間隔,可將其轉換為線性位置測量值。
磁致伸縮傳感器的基本組件
組件
鐵磁波導
位置磁體
阻尼區(接地)
應變脈沖轉換器
測量電子器件
傳播速度對比
聲波(340 m/s…2,850 m/s)<< 電磁波(3.00×10? m/s)
非接觸式線性位置傳感在許多工業應用中不可或缺。磁致伸縮位移傳感器還能實現低至1微米的高精度測量,已廣泛應用于塑料注塑成型機、液壓和氣壓缸、木工機械等領域。電子器件面臨的主要挑戰是高精度時間測量,而使用時間數字轉換器(TDC)可輕松解決這一問題。
1.1 應用實例
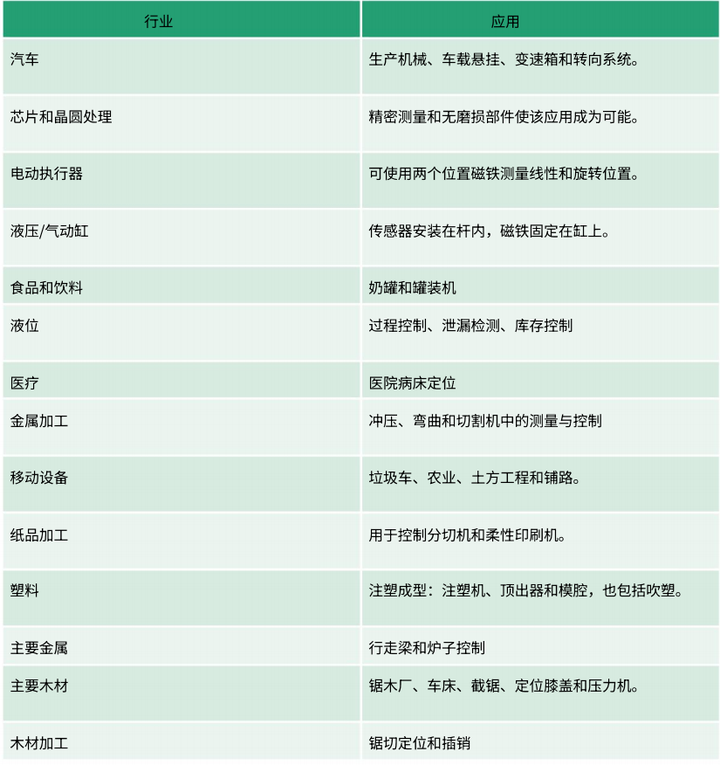
磁致伸縮線性位移傳感器在眾多行業中有廣泛應用。表1列出了目前在生產流程和產品中采用這類傳感器的部分行業及應用場景。 表1:使用磁致伸縮線性位移傳感器的行業及應用
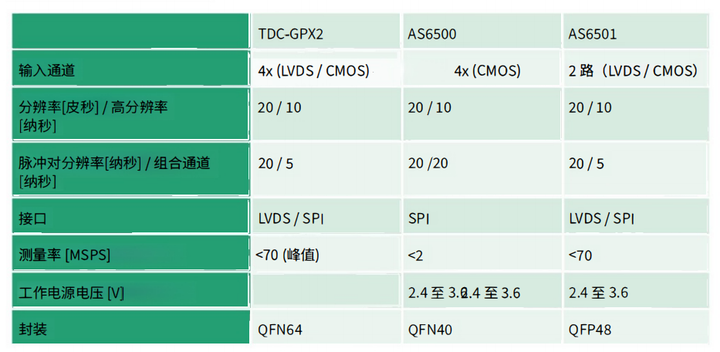
1.2 技術對比
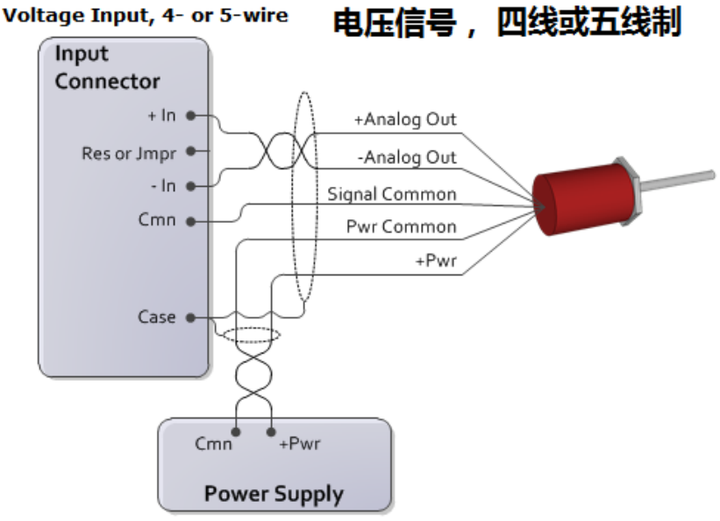
在“設計選用”線性位置傳感器時,需考慮諸多因素。必須妥善關注傳感器與應用需求的匹配,包括電源輸入、信號輸出、外殼樣式、安裝結構、傳感行程,以及傳感技術在應用條件下進行測量的能力。
鑒于這些考量因素和眾多可選方案,該任務可能顯得有些棘手。不過,表2列出了一些值得考慮的主要產品方案。 表2:幾種常用線性位置傳感器的對比
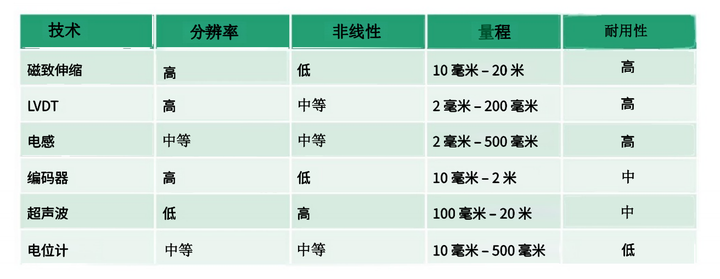
a. 分辨率越高越好,意味著輸出變化的步長更小。
b. 非線性度越低越好,指輸出與理想直線的偏差。
c. FSR表示全行程。
d. 電位器是接觸式傳感器,所列其他均為非接觸式。
1.3 測量原理
測量元件由磁致伸縮波導構成。磁致伸縮材料在磁場作用下會發生彈性形變,該效應的應用方式如下:
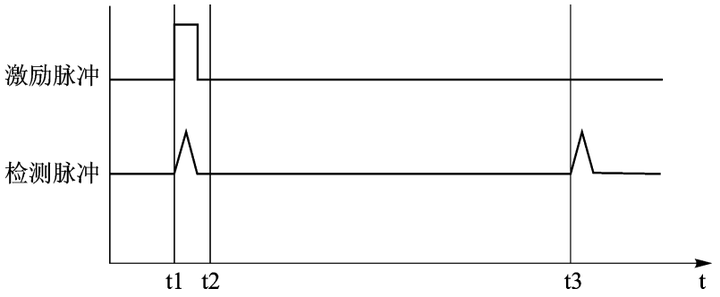
磁致伸縮波導制成管狀,內部有銅棒。通過短電流脈沖啟動測量,這會在波導周圍產生環形磁場。可移動部件的位置由磁體標記,其磁場與電流脈沖的環形磁場垂直。兩個磁場的相互作用產生應變脈沖,該脈沖以聲速沿波導傳播。置于波導末端的傳感器將聲脈沖轉換為電信號,傳播時間與磁體位置直接成正比。波導中的聲速約為2800 m/s,對應約0.36 ms/m。要實現1 mm的分辨率,時間測量精度必須達到t = 360 ns!
例如,在測量距離為1米、波導速度為2800 m/s時,時間延遲為: 1米 ÷ 2800米/秒 = 0.35毫秒
波導中波的傳播速度約為2800 m/s,且對環境影響不敏感。由于導體中波的速度v已知(如通過校準),且測量了電流脈沖發射與磁致伸縮回波接收的時間t,因此可按以下公式近似確定路徑: 距離s ≈ 波速v × 時間t
因此,距離s的確定精度僅受時間測量分辨率的限制。典型裝置可實現約1 μm的分辨率,對應時間t = 360 ps。
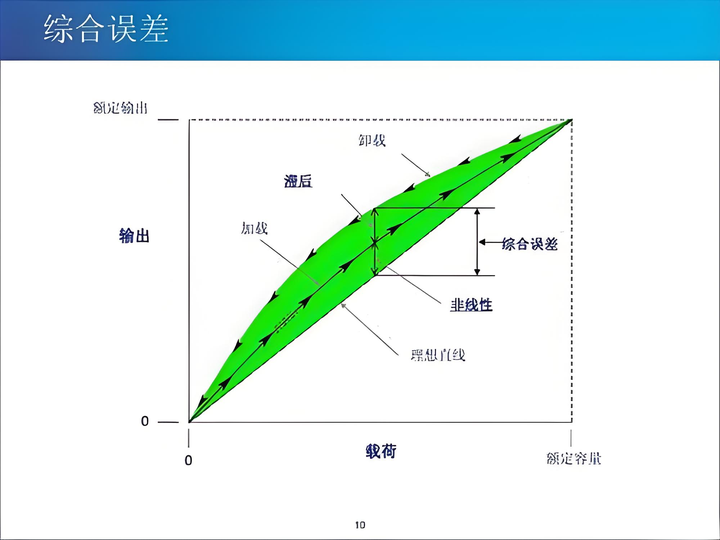
誤差來源
該方法的一個缺點是,導體中波的傳播速度在一定程度上取決于導體溫度T:
如果不采取措施補償這種偏差,當導體溫度偏離校準溫度(通常為室溫)時,測量精度會降低。
審核編輯 黃宇
-
位移傳感器
+關注
關注
5文章
1170瀏覽量
35162
發布評論請先 登錄

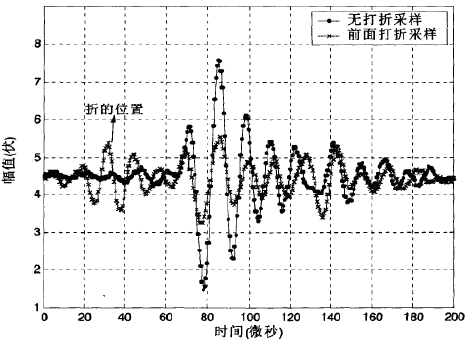
磁致伸縮位移傳感器誤差分析
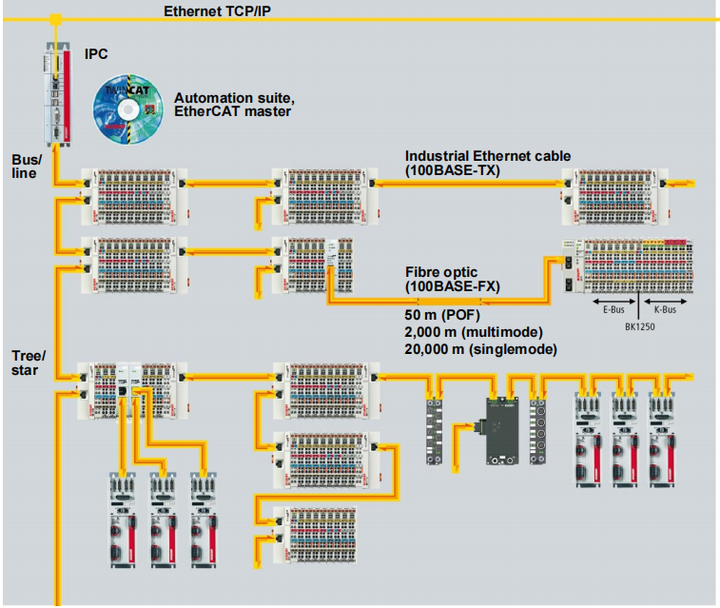
EtherCAT在磁致伸縮位移傳感器中的應用
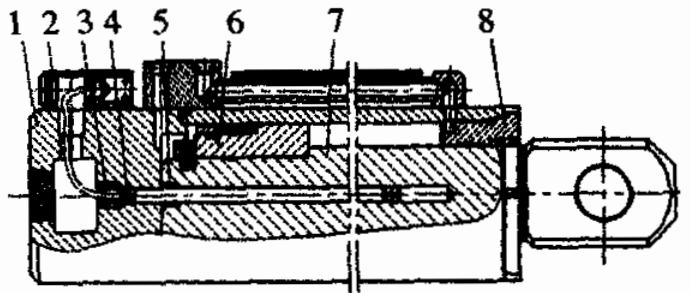
內置磁致伸縮位移傳感器的推移油缸







 工商網監
工商網監
評論