") shimetapi:開(kāi)源RGB+EVS視覺(jué)融合相機(jī)事件相機(jī)工具鏈與算法庫(kù)
shimetapi:開(kāi)源RGB+EVS視覺(jué)融合相機(jī)事件相機(jī)工具鏈與算法庫(kù)

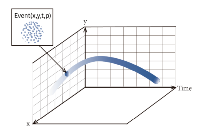
簡(jiǎn)介:ShiMetaPi Hybrid Vision SDK 由 hybrid_vision_toolkit 和 hybrid_vision_algo 兩個(gè)獨(dú)立的SDK組成,分別實(shí)現(xiàn)視覺(jué)融合相機(jī)的接口控制和算法處理。
一、shimetapi_Hybrid_vision_algo (算法層 SDK)
定位: 這是 SDK 的核心算法處理層,位于架構(gòu)的中間層(黃色部分)。
核心功能: 專注于處理來(lái)自事件相機(jī)的原始數(shù)據(jù)流,執(zhí)行高級(jí)的計(jì)算機(jī)視覺(jué)算法,以提升數(shù)據(jù)質(zhì)量、提取有用信息或進(jìn)行三維理解。
包含的模塊:
降噪 (Denoise): 去除事件流中的噪聲,提高信號(hào)質(zhì)量。
插值 (Interpolation): 用于在事件之間生成中間數(shù)據(jù)點(diǎn),或與標(biāo)準(zhǔn)幀圖像進(jìn)行時(shí)空對(duì)齊/融合。
修復(fù) (Restoration): 用于處理數(shù)據(jù)缺失或異常。
計(jì)算機(jī)視覺(jué)/三維視覺(jué) (CV/CV3D): 包含實(shí)現(xiàn)事件相機(jī)特定或融合應(yīng)用的算法,如目標(biāo)檢測(cè)、跟蹤、三維重建、姿態(tài)估計(jì)等。
樣本與數(shù)據(jù) (Samples/data): 提供示例代碼、模型或必要的數(shù)據(jù)集。
外部依賴 (external): 通過(guò)集成第三方庫(kù)給用戶提供更多設(shè)備的選擇,例如:shimetapi Hybrid vision toolkit`,OpenEb(通過(guò)命令安裝)等 。
作用: 它為上層應(yīng)用 (APP) 提供了經(jīng)過(guò)處理、增強(qiáng)或理解的事件數(shù)據(jù)信息。應(yīng)用開(kāi)發(fā)者主要調(diào)用這一層的接口來(lái)實(shí)現(xiàn)事件相機(jī)的高級(jí)功能(如播放、錄制、分析)。
二、shimetapi_Hybrid_vision_toolkit (HAL層工具包)
定位:這是 SDK 的 硬件抽象層 (HAL) 和基礎(chǔ)工具層 ,位于算法層之下(深藍(lán)色部分)。
核心功能:提供與硬件交互和數(shù)據(jù)流基礎(chǔ)操作的功能。它負(fù)責(zé)從物理接口讀取原始數(shù)據(jù),進(jìn)行初步處理(如編解碼),并將數(shù)據(jù)傳遞給上層算法層,同時(shí)也接收上層指令控制硬件。
包含的關(guān)鍵模塊/功能:
讀取 (Read): 從硬件接口(如 USB)獲取原始事件數(shù)據(jù)流。
寫入 (Write): 用于將處理后的數(shù)據(jù)或控制指令發(fā)送回硬件(如果支持)。
設(shè)置 (Setting): 配置相機(jī)參數(shù)(如分辨率、靈敏度等)。
解碼器 (Decoder): 如果事件數(shù)據(jù)以特定格式編碼傳輸,負(fù)責(zé)將其解碼為可處理的格式。
編碼器 (Encoder): 用于將處理后的數(shù)據(jù)或錄制的流編碼為特定格式。
作用: 它抽象了底層硬件的細(xì)節(jié),為上層算法層 (shimetapi_Hybrid_vision_algo) 提供了一個(gè)統(tǒng)一的、相對(duì)硬件無(wú)關(guān)的接口來(lái)訪問(wèn)和控制事件相機(jī)數(shù)據(jù)流。它處理底層的通信協(xié)議、數(shù)據(jù)搬運(yùn)和基礎(chǔ)格式轉(zhuǎn)換。
三、總結(jié)兩者的關(guān)系與協(xié)作
shimetapi_Hybrid_vision_toolkit (工具包/HAL層):
直接與硬件和底層系統(tǒng)SDK 打交道。
負(fù)責(zé)獲取原始數(shù)據(jù) (Read),進(jìn)行基礎(chǔ)格式轉(zhuǎn)換 (Decoder),控制硬件(Setting),并輸出數(shù)據(jù)(Write, Encoder)等。
向上層 (algo 層) 提供 標(biāo)準(zhǔn)化的數(shù)據(jù)訪問(wèn)接口 。
shimetapi_Hybrid_vision_algo (算法層):
構(gòu)建在 toolkit 層之上。
接收來(lái)自 toolkit 層的 標(biāo)準(zhǔn)化事件數(shù)據(jù)流 。
利用其包含的高級(jí)算法模塊 (Denoise, Interpolation, CV/CV3D 等) 對(duì)數(shù)據(jù)進(jìn)行 處理、增強(qiáng)、分析和理解 。
將處理后的、更有價(jià)值的信息提供給最上層的應(yīng)用程序 (APP)使用(如顯示 UI、Player 播放、Recorder 錄制、Analyzer 分析)。
兼容不同廠商接口(目前支持ShiMetaPi HV Toolkit和Openeb)。
開(kāi)源地址鏈接[github]
https://github.com/ShiMetaPi/shimetapi_hybrid_vision_algo
https://github.com/ShiMetaPi/shimetapi_hybrid_vision_toolkit
[gitee]
https://gitee.com/ShiMetaPi_0/shimetapi_hybrid_vision_algo
https://gitee.com/ShiMetaPi_0/shimetapi_hybrid_vision_toolkit
審核編輯 黃宇
-
相機(jī)
+關(guān)注
關(guān)注
4文章
1458瀏覽量
54616 -
RGB
+關(guān)注
關(guān)注
4文章
807瀏覽量
59819 -
SDK
+關(guān)注
關(guān)注
3文章
1076瀏覽量
48045
發(fā)布評(píng)論請(qǐng)先 登錄
RGB+EVS視覺(jué)融合相機(jī):事件相機(jī)的革命性突破?
工業(yè)相機(jī)圖像采集卡:機(jī)器視覺(jué)的核心樞紐

【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】視覺(jué)實(shí)現(xiàn)的基礎(chǔ)算法的應(yīng)用
高光譜相機(jī)的優(yōu)勢(shì)有哪些?
視美泰EVS事件融合相機(jī)新品“靈光一號(hào)”正式發(fā)布,開(kāi)啟視覺(jué)新紀(jì)元

用于任意排列多相機(jī)的通用視覺(jué)里程計(jì)系統(tǒng)

深視智能高速相機(jī)觀測(cè)細(xì)菌鞭毛游動(dòng)#高速相機(jī) #工業(yè)相機(jī) #機(jī)器視覺(jué) #傳感器 #科普
深視智能高速相機(jī)觀測(cè)水滴滴落過(guò)程#高速相機(jī) #高清高速相機(jī) #高速工業(yè)相機(jī) #工業(yè)相機(jī) #機(jī)器視覺(jué) #傳感器

新品上市|深視智能高速相機(jī)精靈系列引領(lǐng)行業(yè)新風(fēng)尚 集多項(xiàng)高端技術(shù)于一體!#深視智能#高速相機(jī)
機(jī)器視覺(jué)系統(tǒng)硬件組成之工業(yè)相機(jī)篇


網(wǎng)絡(luò)研討會(huì): Teledyne FLIR IIS Forge 5GigE高速高精度機(jī)器視覺(jué)工業(yè)相機(jī)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論