 自動駕駛汽車如何正確進行道路識別?
自動駕駛汽車如何正確進行道路識別?

[首發于智駕最前沿微信公眾號]自動駕駛汽車在行駛過程中必須準確識別道路環境,以便做出安全有效的決策,不同于人類開車,可以思考,自動駕駛汽車對于道路的識別需要更多的技術輔助。對于自動駕駛汽車來說,道路識別不僅僅是簡單地判斷車輛是否在車道中心行駛,更涉及到對車道線、交通標志、道路邊緣以及其他道路要素的綜合感知與理解。

傳感器硬件
傳感器硬件是自動駕駛道路識別的基礎,當前主流的傳感器包括攝像頭、激光雷達(LiDAR)、毫米波雷達,以及慣性測量單元(IMU)和高精度全球導航衛星系統(GNSS)。攝像頭可以獲取高分辨率的光學圖像,用于車道線、交通標志和交通信號燈的視覺識別;激光雷達則能夠獲取環境的三維點云數據,描繪出周圍物體和道路表面的精確幾何形態;毫米波雷達擅長在惡劣天氣或灰塵、雨雪等視覺被遮擋的條件下檢測前方障礙物和道路邊緣;IMU和GNSS則為車輛提供精確的姿態與絕對位置。

各類傳感器各有優勢,但也都有自身局限,攝像頭容易受強光照影響而產生眩光,激光雷達在大雨或大霧天氣中點云質量會下降,毫米波雷達的角度分辨率相對較低。為了克服各自弱點,實現對道路環境的全面感知,自動駕駛系統通常采用多傳感器融合的方式,將不同類型的傳感數據在時間和空間上進行對齊和融合。融合的第一步是傳感器的空間標定,包括攝像頭內外參、LiDAR與車輛坐標系之間的外參、毫米波雷達與其他傳感器之間的對齊關系等。只有在精確標定的前提下,才能保證各傳感器采集的數據在同一坐標系下無縫拼接,從而為后續感知算法提供可靠的基礎。

感知算法
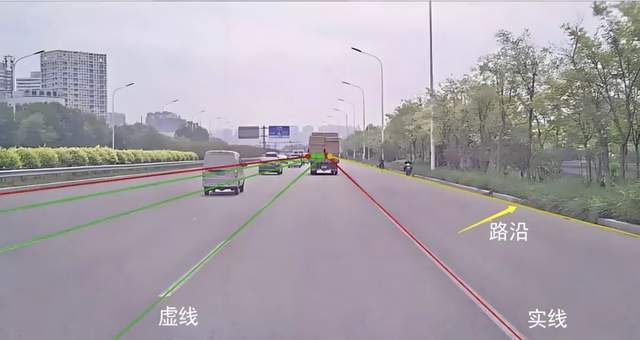
感知算法是道路識別的核心內容。以攝像頭為例,常見的道路識別子任務包括車道線檢測、語義分割與實例分割、交通標志與交通信號燈識別。車道線檢測往往需要對圖像進行預處理,如去畸變、色彩空間轉換、邊緣檢測等,然后基于深度學習的卷積神經網絡(Convolutional Neural Network,CNN)進行特征提取與端到端預測。典型的方法包括使用全卷積網絡(FCN)進行車道語義分割,將圖像中屬于車道線的像素區域分割出來,再結合圖像投影至鳥瞰視角(IPM,Inverse Perspective Mapping)技術,對分割結果進行幾何校正,以便獲取車道線在車輛坐標系下的真實位置。另有基于霍夫變換或曲線擬合的方法,通過對邊緣信息進行霍夫直線或霍夫曲線檢測,提取車道線位置,但這種方法對圖像質量依賴較強,常在光照不佳時出現誤檢或漏檢。相比之下,基于深度學習的端到端車道檢測模型(如SCNN、ENet-Lane等)能夠更好地兼顧復雜場景下的泛化能力,但對大量標注數據和訓練資源要求較高。
對于道路表面及障礙物的三維感知,激光雷達是最重要的傳感器。激光雷達在旋轉或固態掃描方式下對周圍空間進行快速采樣,得到一系列三維點云。點云數據經過濾波、下采樣與聚類等預處理后,可以利用基于圖卷積網絡(GCN)、PointNet等深度學習框架進行語義分割,將點云中的道路、路緣、車輛、行人、樹木等類別區分開來。在道路識別的過程中,首先需要對點云進行地面分割,將駕駛可通行區域與非通行區域區分。可以通過地面分割算法(如基于高程閾值的RANSAC擬合)、基于深度學習的地面檢測模型(如PointNet系列)等方式,將道路地面點與其他點分離。接著,對剩余點云進行障礙物檢測和聚類,將障礙物點分為不同的實例對象,便于后續跟蹤與路徑規劃。為了提取道路邊緣信息,可以結合車輛前方區域的點云數據,通過提取點云中地面與突出物體分界處的跳變點,在局部范圍內擬合道路邊緣曲線。對于復雜城市場景,還需要對道路交叉口、轉彎斜坡等特征進行判別,對點云中投影到鳥瞰視角下的點密度分布進行聚類與曲線擬合,以便提取多條車道之間的幾何關系。
毫米波雷達盡管點云分辨率低,但對于動態障礙物檢測具有天然優勢。毫米波雷達通過發送電磁波并測量其回波信號的多普勒頻移與延時,可以直接計算出目標物體的距離、角度和速度向量。因此,在高速行駛或高速公路場景下,毫米波雷達能夠在遠距離(通常在150米以上)可靠地探測到車輛、摩托車等移動目標,為道路識別提供早期預警。毫米波雷達輸出的點云往往與激光雷達的點云進行融合,在混合模型中權衡精度與實時性。在車輛即將進入彎道或遇到前方緊急制動時,毫米波雷達的快速預警可以提前觸發緊急制動決策,而激光雷達負責地圖級別的精細化建模與周圍環境輪廓提取。為了實現跨傳感器的數據融合,常見做法是采用卡爾曼濾波或擴展卡爾曼濾波(EKF)、無跡卡爾曼濾波(UKF)等方法對多源信息進行狀態估計,通過狀態空間模型將攝像頭與激光雷達的檢測結果不斷校正,得到更穩定可信的道路信息。

高清地圖與精準定位
在感知算法之外,高清地圖(HD Map)與精準定位是確保道路識別準確性的關鍵環節。高清地圖一般包含車道線中心線、分割線、道路曲率、坡度、交叉口入口、交通標志、交通信號燈位置等高精度地理信息,并且這些信息往往精確到厘米級。自動駕駛系統在感知到周圍環境要素后,還需要將實時感知數據與高清地圖進行匹配,以校正車輛當前所在車道、彎道半徑、道路拓撲結構等信息。定位技術通常采用視覺里程計(VO)、激光雷達里程計(LOAM)、慣性導航系統(INS)與GNSS相結合的方案。具體而言,車輛搭載的IMU可以提供高頻率的加速度與角速度數據,將其與GNSS輸出的絕對位置結合,通過緊耦合或松耦合姿態解算,獲得初步的車輛定位。與此同時,攝像頭或激光雷達對周圍環境進行掃描,提取匹配特征點(如建筑物角點、道路標志、車道線),并與預先構建的HD Map進行匹配定位(例如使用基于光學特征的視覺定位算法,或基于點云配準的ICP算法),進一步修正GNSS/INS定位誤差,使得車輛在地圖坐標系下的橫向和縱向誤差控制在10厘米以內。只有定位達到足夠精度,系統才能正確判斷車輛所在車道與道路幾何形態,從而為后續路徑規劃與決策提供可靠依據。

模型訓練與驗證
針對道路語義識別的深度學習模型,需要進行大量高質量數據的采集與標注,并在多樣化場景中不斷迭代訓練,以提高模型在復雜天氣、光照變化以及道路破損等極端情況下的魯棒性。
在數據采集端,除了白天、晴天環境外,還需覆蓋夜間、雨天、霧天、積雪等多種工況,這樣訓練出的模型才能在真實道路中準確分辨車道線、路面紋理與標志。數據標注環節通常需要專業標注團隊,針對車道線標注多種樣式(實線、虛線、雙黃線等),同時對交通標志進行精細分類(限速、禁行、通過、指示等)。為了進一步增強模型的泛化能力,研究人員還會使用數據增強技術,例如圖像旋轉、平移、色彩擾動、隨機遮擋等;對于點云數據,則可進行隨機下采樣、點云噪聲注入和局部幾何變形等操作。訓練階段多采用交叉熵損失或Dice損失等多任務損失函數,對語義分割與實例分割任務進行聯合優化。此外,考慮到自動駕駛系統在部署階段的實時性需求,模型必須經過輕量化剪枝(Pruning)、量化(Quantization)和知識蒸餾(Knowledge Distillation),將原始大型網絡壓縮到能夠在車載計算單元(如NVIDIA DRIVE、Mobileye EyeQ、Tesla Dojo等)實時運行的尺寸,同時保證推理速度能夠滿足10毫秒以內的實時識別要求。
在算法模型訓練與驗證之外,系統級的測試與驗證同樣重要。自動駕駛道路識別系統必須經過仿真測試和實車測試的雙重考驗。仿真平臺一般使用CarSim、PreScan、LGSVL等仿真軟件構建虛擬路網,包括高速公路、市區道路、鄉村道路、隧道以及各種交叉口等。仿真能夠覆蓋常規場景與極端工況,例如突發性障礙物、大風沙、暴雨、大雪等場景,通過大量實驗驗證算法對車道偏離、路面污損等情況的適應性。仿真測試得到的數據與實際道路數據一起用于模型評估,從而評估感知算法在不同環境下的性能指標:召回率(Recall)、精確率(Precision)、IoU(Intersection over Union)等。如果仿真結果未達到指標閾值,需要對模型進行迭代改進并重新驗證。實車測試則將車輛部署到封閉測試場地或實際道路中,觀察系統在復雜交通流、行人交叉、動態陰影、路邊停靠車輛等真實場景下的表現。測試過程中需嚴格執行測試用例,記錄系統在不同場景下的感知準確性、延遲、失真、誤報率等關鍵指標。只有在仿真與實車測試均通過之后,系統才能進入預量產或量產階段。

系統冗余與健康監測
確保道路識別信息的準確性還需要冗余與健康監測機制。冗余設計的核心思想是讓系統在單一傳感器或算法失效時,依然能夠維持對道路環境的基本感知。具體做法包括多套攝像頭組成環視系統,分別負責前向、側向和后向的圖像采集;雙激光雷達配置互為備用,若某一路徑的激光雷達出現故障,另一組雷達仍能提供關鍵的點云信息;毫米波雷達與攝像頭的融合在于,攝像頭負責細粒度的線型識別,毫米波雷達負責距離與速度預估,這種多傳感器互補在雨雪霧等視覺受限場合格外重要。算法層面則會設計多路感知算法并行運行,例如獨立的視覺車道檢測網絡與基于點云的車道線擬合算法并行,雙方各自得出車道邊緣結果后再進行一致性校驗。若算法A與算法B的車道預測在橫向偏差小于一定閾值,則以加權平均的方式輸出;若出現較大分歧,則觸發監測報警,提示系統處于不可靠狀態,并進入安全降級策略(如減速、保持車道行駛或報警人工接管)。
傳感器與算法的在線健康監測也同樣重要。以攝像頭為例,系統會實時監測攝像頭圖像的亮度直方圖分布,對飽和度、對比度和銳度進行統計分析;若發現圖像過暗或過曝、對比度極度偏低,則判定攝像頭可能被遮擋或故障,觸發重新標定或系統報警。激光雷達則會根據激光反射強度分布與點云密度進行健康判斷,若發現某一區域點云突然銳減或存在大量孤立點,可能意味著激光雷達鏡面被遮擋或出現偏差,需要及時校正。毫米波雷達的信號質量則通過回波信噪比(SNR)與相位噪聲等指標進行在線監測,一旦檢測到異常噪聲或信號丟失,也會觸發系統提示。算法層面,可以通過對比模型輸出與歷史軌跡數據進行一致性檢驗,例如歷史車道邊界曲線應具有一定連續性,當檢測結果出現突變時,說明模型在當前場景下可能失效,此時系統也會選擇臨時降級或人工接管。

實時計算與持續迭代
在確保識別準確性的同時,還需要關注實時性和計算性能。自動駕駛系統通常采用高性能嵌入式平臺,如NVIDIA DRIVE AGX Xavier、NVIDIA Orin、Mobileye EyeQ5、Qualcomm Snapdragon Ride等。這些平臺集成了GPU、DSP、FPGA等異構計算單元,能夠同時滿足深度學習推理、點云處理與路徑規劃等多個計算密集型任務的并行需求。為了保證實時性,感知算法需要采用流水線架構,圖像捕獲后先由前端預處理(去畸變、色彩校正),隨后進入神經網絡加速單元進行特征提取與分類,最后再與激光雷達點云數據進行融合與后處理。各模塊之間的輸入輸出數據通過共享內存或高速總線交換,盡量減少數據復制與總線延遲。另外,在算法設計過程中,也要注意模型推理延遲與內存占用之間的權衡,通過結構化剪枝、權重量化以及模型壓縮等手段,將模型體積縮減到幾十兆字節以內,以便在嵌入式設備上運行時能夠維持10–20毫秒的推理時延。這種實時性要求不僅是對識別準確性的補充,也直接關系到行駛安全:如果算法延遲過高,就無法及時響應環境變化,容易導致感知失真與控制滯后。
自動駕駛道路識別系統的持續迭代與生命周期管理也非常關鍵。在自動駕駛系統上線初期,車輛會在有限的地圖區域和預定義路段進行封閉驗證,一段時間后逐步擴大測試范圍,進入半開放道路測試。測試期間,系統會不斷采集真實行駛數據,將路上出現的新類型場景(如新型施工路段、臨時交通標志、非機動車臨時停放等)加入到數據集中,再次進行離線訓練與迭代升級。OTA(Over-The-Air)升級機制確保每輛車在新增功能或優化模型發布后,可以在較短時間內完成軟件更新。此外,自動駕駛系統提供商還會建立冗余決策監控平臺,持續收集車輛端的感知日志、算法推理日志和傳感器原始數據,一旦檢測到道路識別出現大規模誤判或異常情況,就會立即觸發安全警示與召回策略。為了避免OTA升級引發意外風險,每次升級會先在少量試點車輛中進行灰度推送,觀察系統在實際道路上的穩定性與可靠性指標,確認沒有重大問題后才會向全量車輛推送更新。

最后的話
自動駕駛汽車進行道路識別是一個集傳感器硬件、感知算法、數據融合、高清地圖與精準定位、模型訓練與驗證、系統冗余與健康監測,以及實時計算與持續迭代于一體的復雜系統工程。傳感器提供原始數據,并通過精確標定與對齊,為算法處理打下基礎;計算機視覺和深度學習算法在二維圖像和三維點云中提取道路車道、標志標線和障礙物等信息;多傳感器融合與高清地圖匹配進一步提升識別的空間精度;在線健康監測、冗余設計和系統級驗證則確保道路識別在異常場景下保持穩定可靠;高性能嵌入式平臺與流水線式計算架構保證實時性;而持續的仿真測試、實車試驗與OTA升級,構建了一個動態閉環的迭代機制,使得道路識別能力能夠不斷進化。通過這一系列技術手段的有機結合,自動駕駛系統才能在千變萬化的道路環境中準確識別車道與周圍要素,為最終實現安全、高效的自動駕駛奠定堅實基礎。
-
道路識別
+關注
關注
0文章
4瀏覽量
6667 -
感知系統
+關注
關注
1文章
77瀏覽量
16194 -
自動駕駛
+關注
關注
788文章
14266瀏覽量
170185 -
汽車
+關注
關注
14文章
3830瀏覽量
39396
發布評論請先 登錄
自動駕駛汽車是如何準確定位的?

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

自動駕駛安全基石:ODD
《汽車駕駛自動化分級》會更適合中國自動駕駛發展嗎?

NVIDIA Halos自動駕駛汽車安全系統發布
自動駕駛的未來 - 了解如何無縫、可靠地完成駕駛







 工商網監
工商網監
評論