") 提升人形機器人運動能力,需要把控運動關節(jié)哪些關鍵參數(shù)?
提升人形機器人運動能力,需要把控運動關節(jié)哪些關鍵參數(shù)?

人形機器人,也稱為仿生人形機器人。一般認為是應當具有類人的外觀、感知、決策、行為和交互能力,可以在生活、工作場景內(nèi)如人類一般完成外界感知、自主運動、行為交互等一系列任務的機器人。
近年來,全球主要發(fā)達國家紛紛加強人形機器人的研發(fā)與產(chǎn)業(yè)布局。工信部發(fā)布的《人形機器人創(chuàng)新發(fā)展指導意見》中提到:人形機器人有望成為繼計算機、智能手機、新能源汽車后的顛覆性產(chǎn)品,深刻變革人類生產(chǎn)生活方式,重塑全球產(chǎn)業(yè)格局。
據(jù)相關預測,中國人形機器人市場規(guī)模2026 年達到104.71 億元,2029年達到750 億元,到 2035年有望達到3000億元規(guī)模。
相比傳統(tǒng)工業(yè)機器人,人形機器人需要非常多的自由度,所用到的活動關節(jié)也大大增加。這些關節(jié)零部件的制造能力,也成了機器人運動能力提升的關鍵。
這些關節(jié)包括無刷直流伺服電機、空心杯電機、行星減速器、諧波減速器、滾珠絲杠等。總體而言,電機、減速器、絲杠則是人形機器人關鍵運動的關鍵組成部件。
因此,在生產(chǎn)制造中,如何控制這三大零部件的關鍵尺寸與參數(shù),都尤為關鍵。
本期推文,小優(yōu)博士結(jié)合優(yōu)可測在協(xié)助企業(yè)進行關鍵零件把控經(jīng)驗來介紹一下。
/電機
在電機制造中,企業(yè)會關注電機磁性瓦片的尺寸,矽鋼片尺寸,轉(zhuǎn)子軸的尺寸。

電機磁性瓦片尺寸測量-閃測儀FM系列
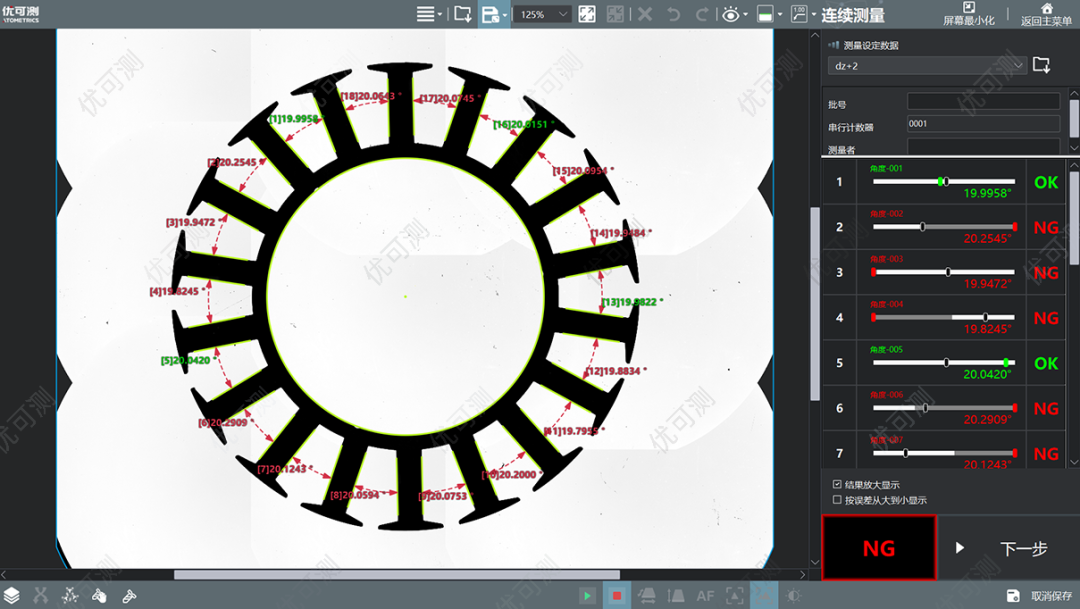
矽鋼片尺寸測量-閃測儀FM系列
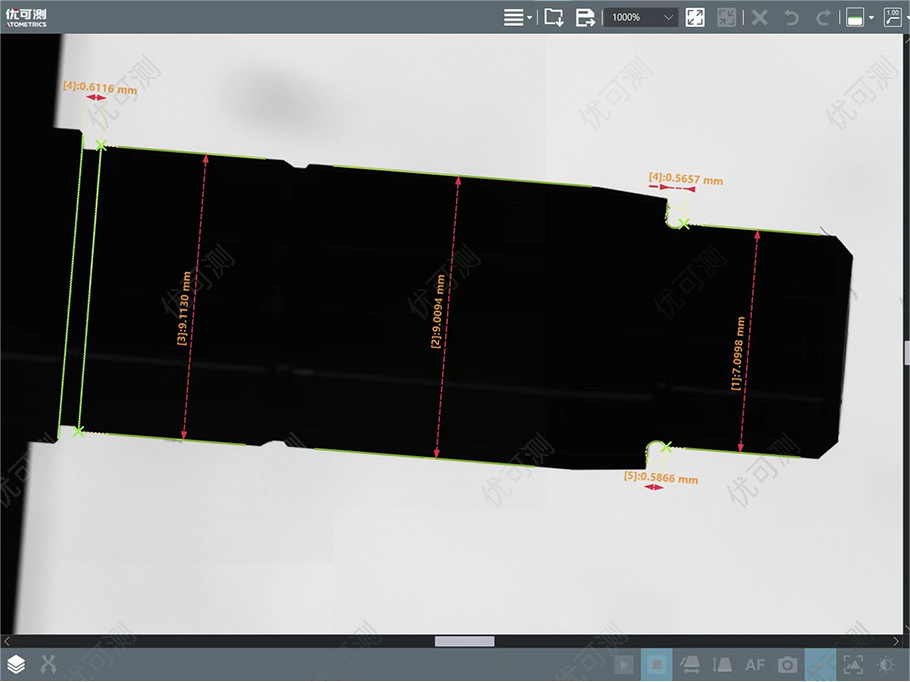
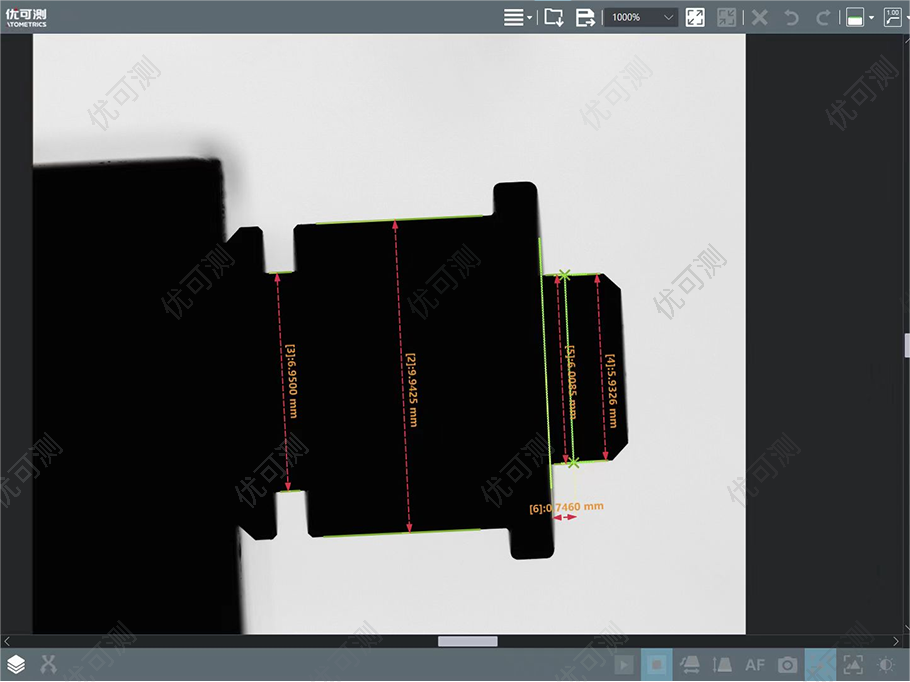
電機軸承尺寸測量-閃測儀FM系列
在有刷電機上,企業(yè)也會通過顯微鏡對碳刷進行失效性分析。
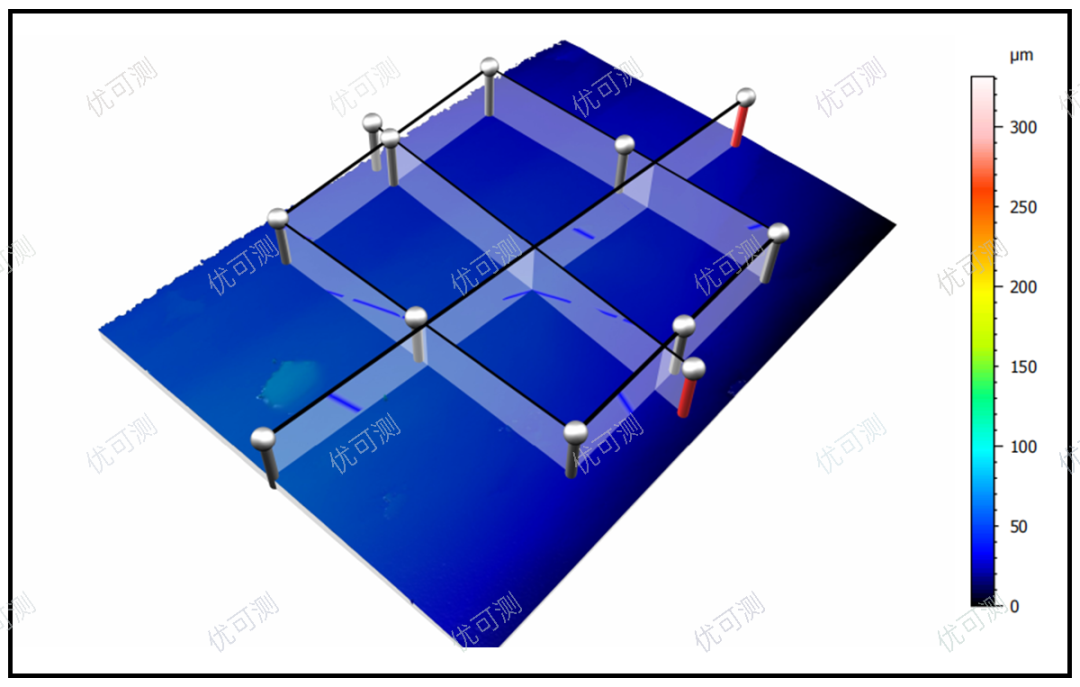
對于一些精密電機,企業(yè)甚至會選擇白光干涉儀,對碳刷與換向器的接觸面進行分析,控制兩側(cè)的粗糙度,從而降低磨損,減低噪音,提升碳刷的壽命。
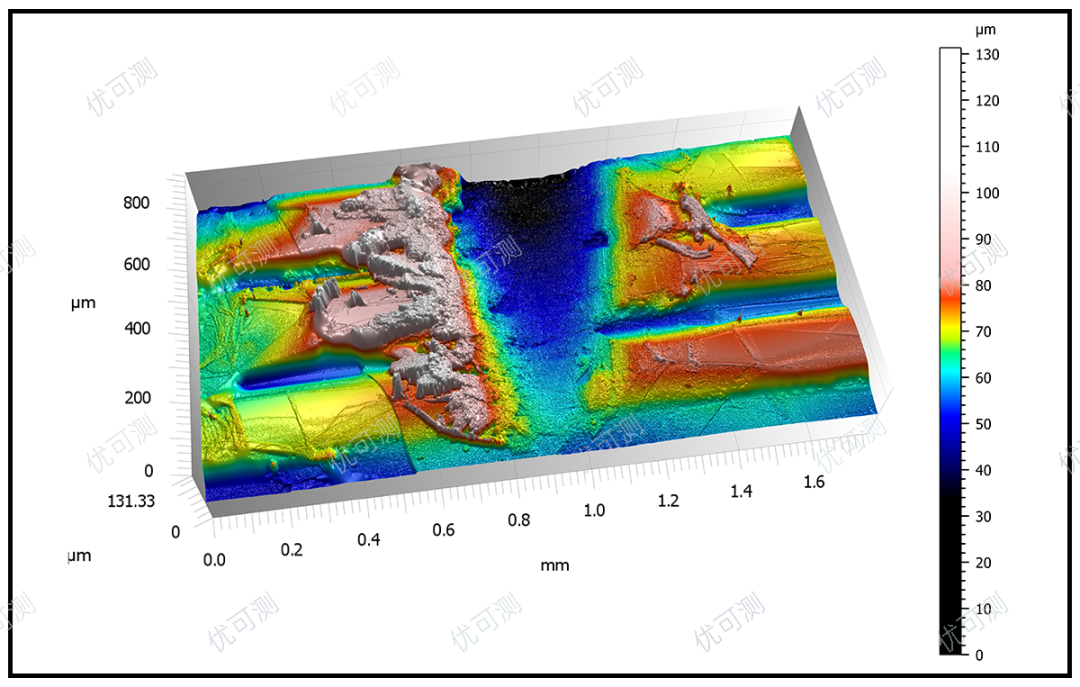
碳刷磨損體積-白光干涉儀AM系列
在交流電機制造中,企業(yè)同樣會使用大倍率的顯微鏡,對定子線圈的繞線進行失效性分析、表面缺陷分析等。

電機線路焊錫失效性分析-超景深顯微鏡AH系列
靈巧手上會部署多個精密的空心杯電機,這些電機在制造中,廠家也會關注外殼、磁鋼、霍爾傳感器的尺寸,并會采購閃測儀這類的設備,對這些零部件的尺寸進行在線抽檢,或者全檢。
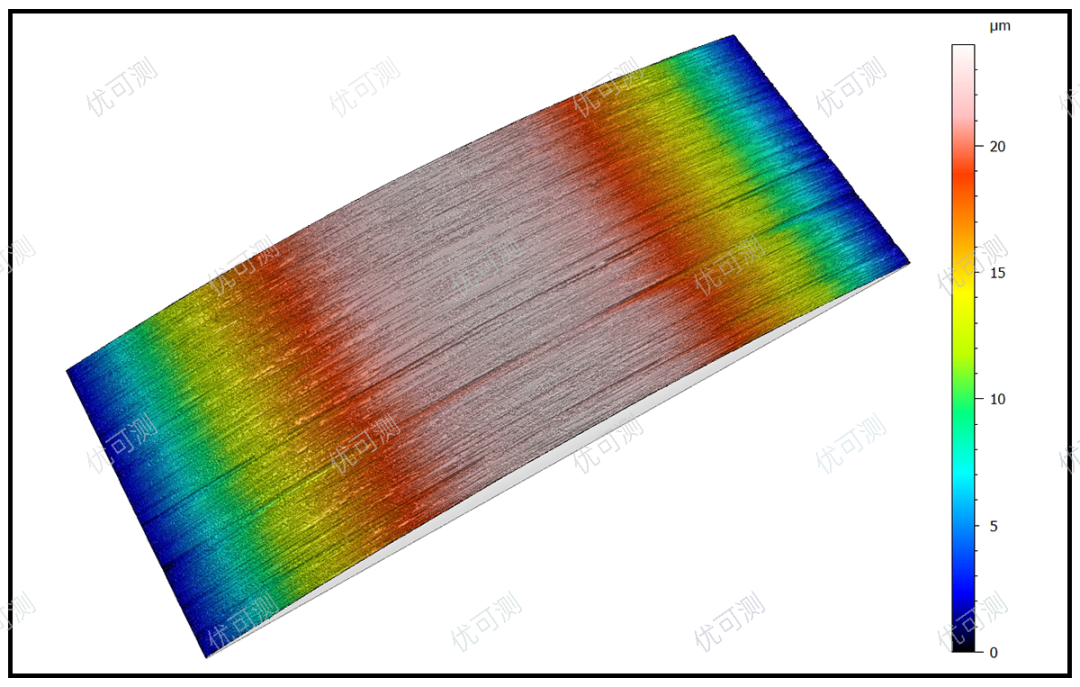
在伺服電機中,對電機轉(zhuǎn)動角度控制的“磁柵編碼器”,也是制造企業(yè)重點關注的對象。有些企業(yè)會采購白光干涉儀,對編碼器的激光槽高度、表面粗糙度、磁高度進行把控。部分高精密的編碼器,表面粗糙度管控甚至要達到納米級。
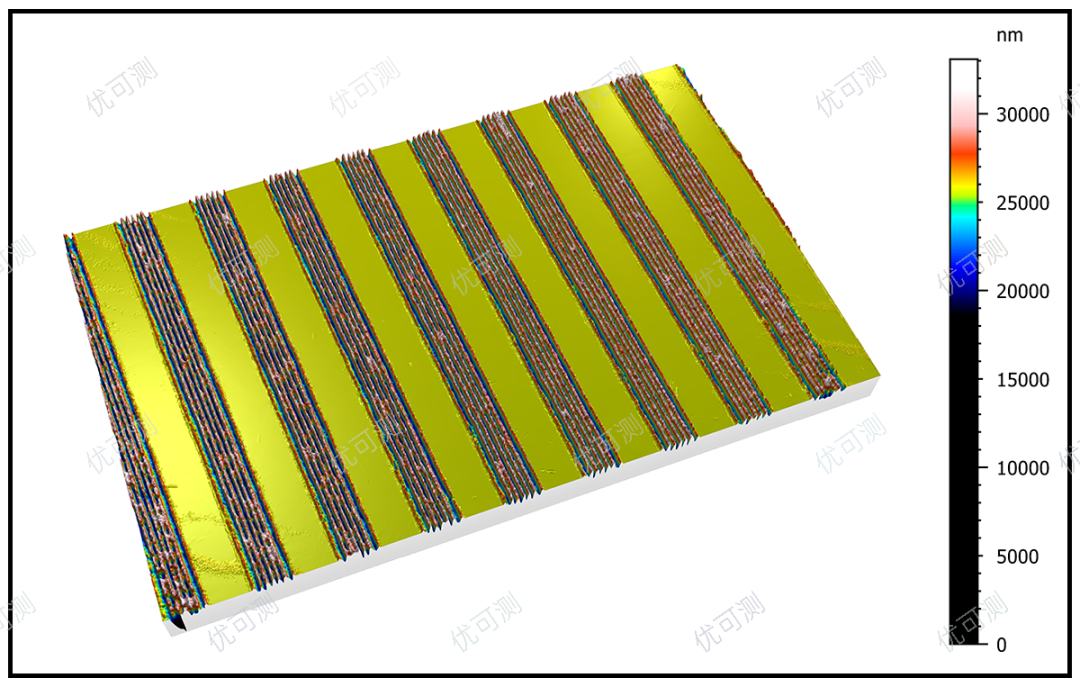
磁柵編碼器微觀形貌測量-白光干涉儀AM系列
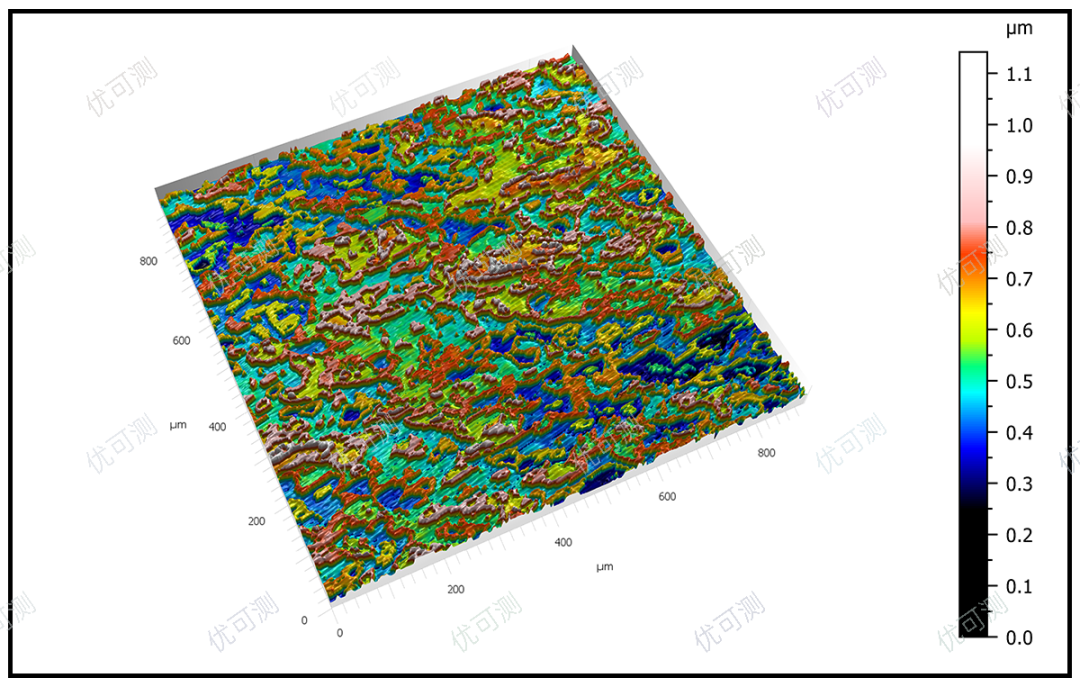
磁柵編碼器粗糙度測量-白光干涉儀AM系列
在一些高速電機中,廠家也會關注軸的軸跳動,利用能檢測微小跳動的光譜共焦傳感器來進行測量。
/減速器
在減速器中,很多都配置了磁柵編碼器或者光柵編碼器。這些編碼器的尺寸與表面粗糙度,同樣需要進行管控。
在減速器與電機共同組成的運動關節(jié)模組中,一般會包含多個齒輪,如行星齒輪、減速器內(nèi)齒輪等。為了減少齒輪嚙合阻力,降低摩擦,提升運動關節(jié)壽命,廠家會對齒輪、軸、套尺寸;傳動軸的軸跳動;齒輪嚙合面粗糙度進行管控。在這些管控環(huán)節(jié),白光干涉儀、閃測儀、線激光傳感器、高倍率超景深顯微鏡都是比較常見的檢測設備。
行星齒輪粗糙度測量-白光干涉儀AM系列
減速器齒輪磨損分析-白光干涉儀AM系列
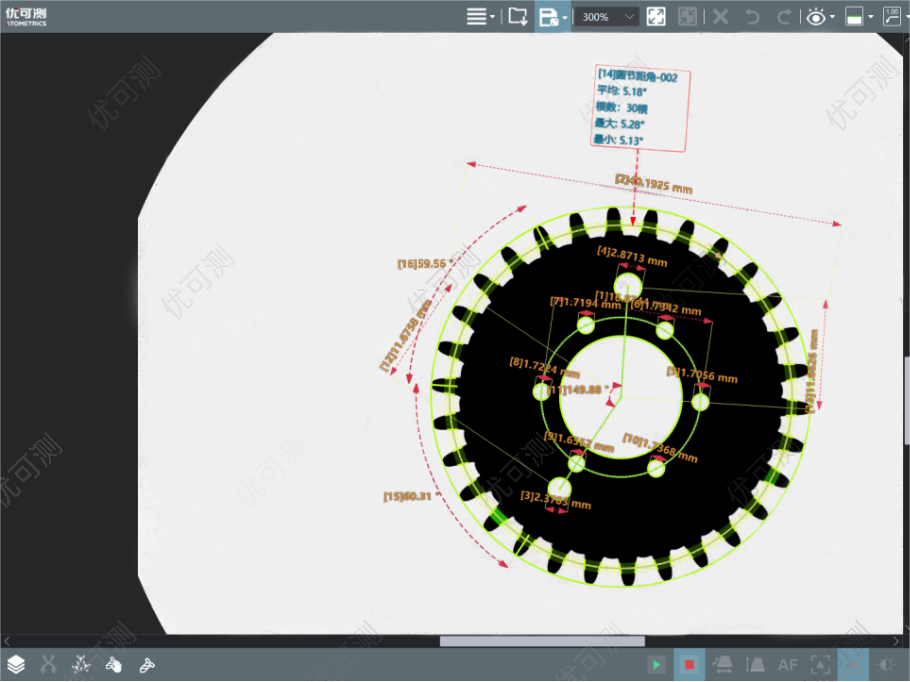
減速器齒輪測量-閃測儀FM系列
/絲桿
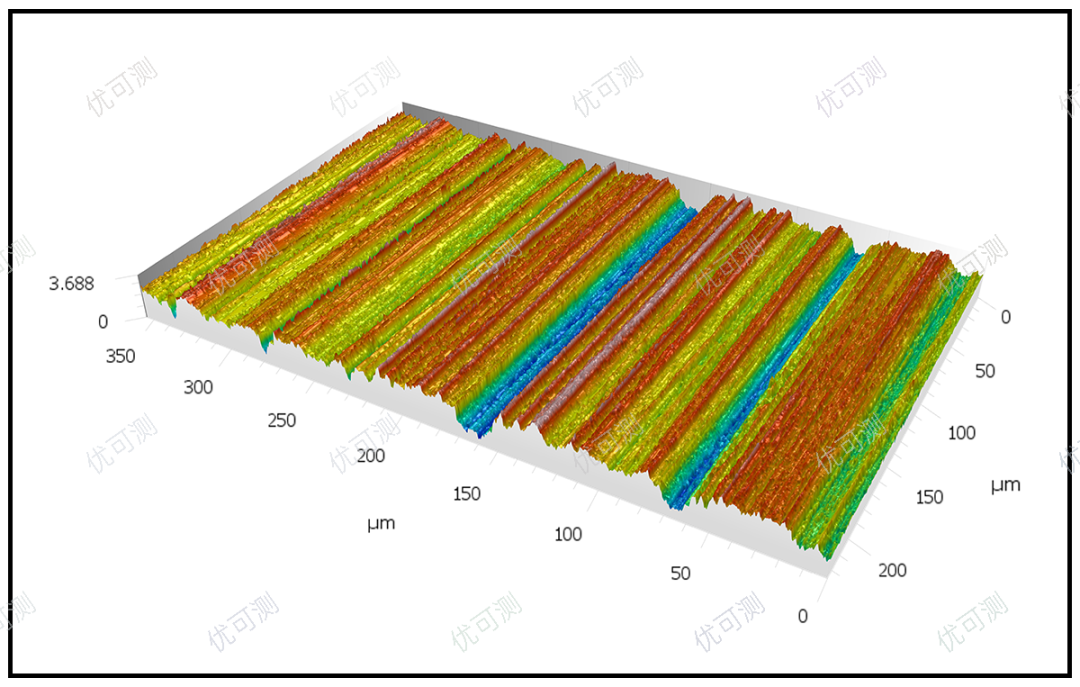
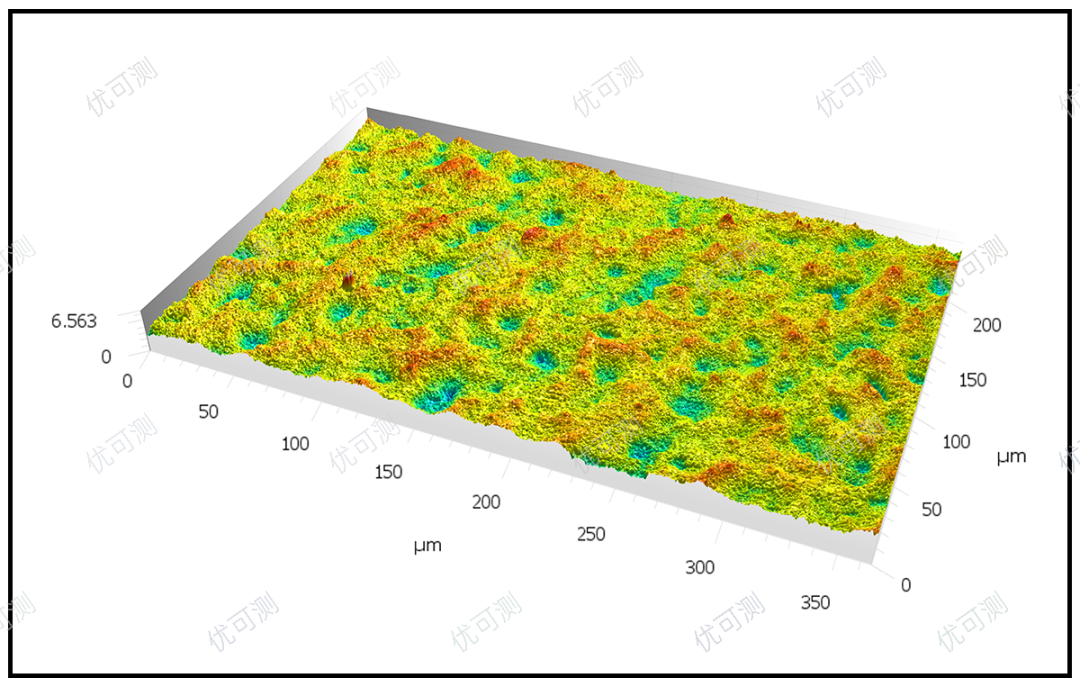
目前部分人形機器人的運動關節(jié)會采用到如滾珠絲杠的直線運動方案。如特斯拉的擎天柱機器人的手部就包含了12個行星滾珠絲杠結(jié)構(gòu),腿部包含了14個行星滾珠絲杠。行星滾珠絲杠結(jié)構(gòu)要降低運動噪音,提升運動效率,需要精密磨床進行加工,同樣也需要高精度白光干涉儀等測量設備,對軸、絲杠軸跳動,以及齒輪嚙合面粗糙度進行精密管控。
滾珠絲杠寬齒表面粗糙度測量-白光干涉儀AM系列
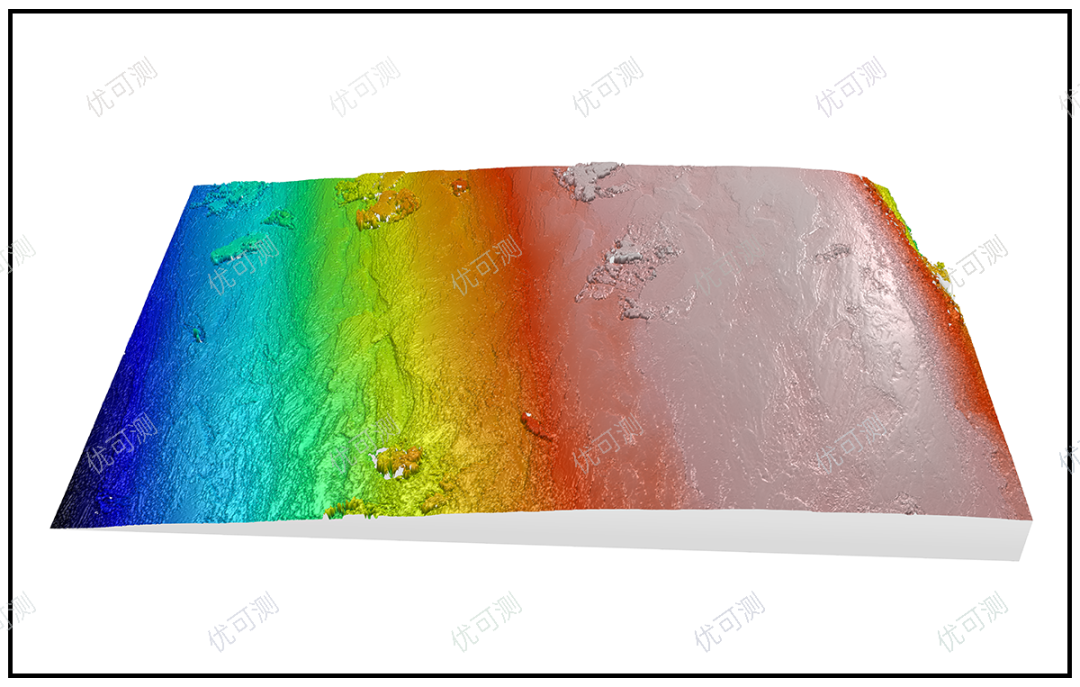
絲桿螺紋斜面形貌分析-白光干涉儀AM系列
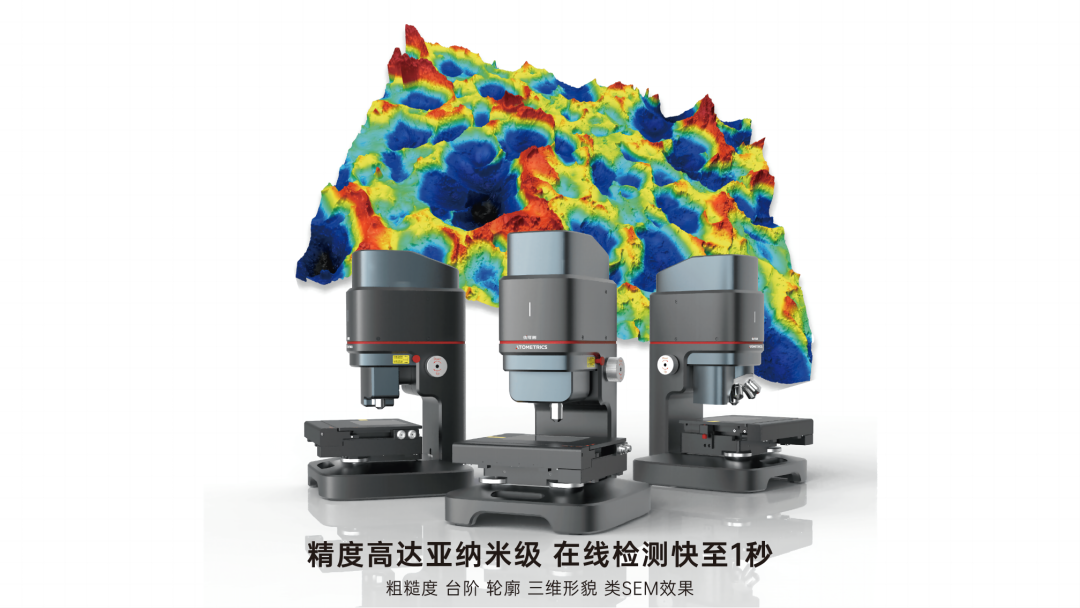
白光干涉儀AM系列

一鍵影像測量儀FM系列

超景深顯微鏡AH系列
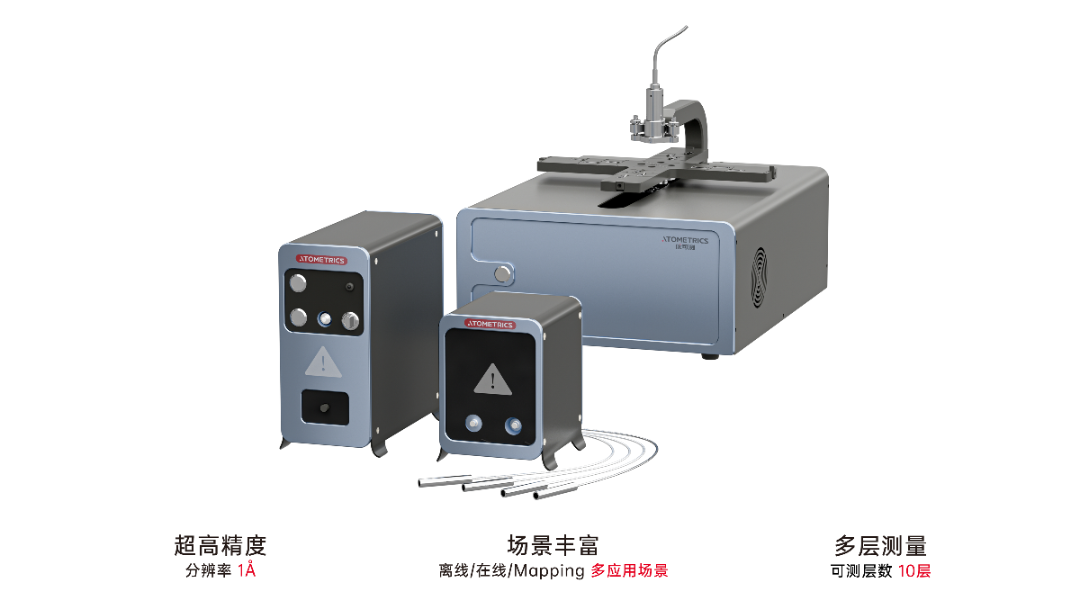
薄膜厚度測量儀AF系列
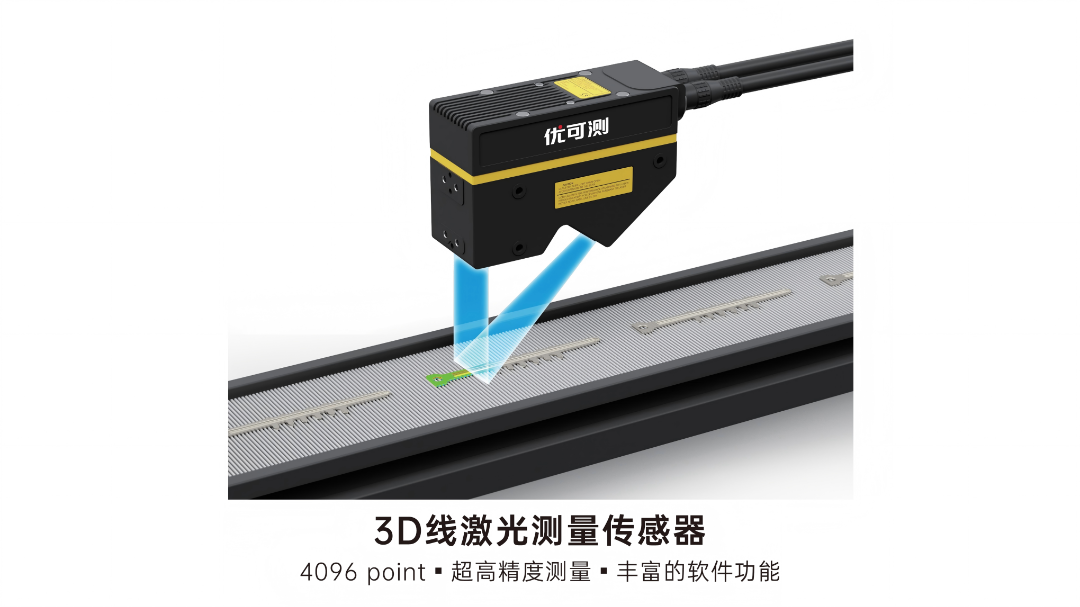
3D線激光傳感器AR系列
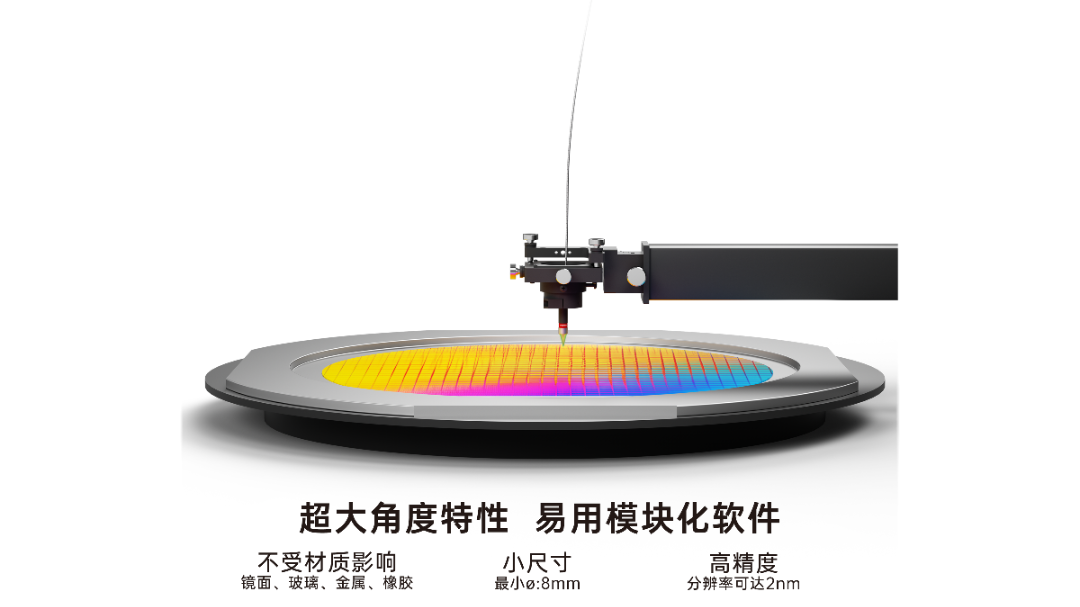
光譜共焦位移傳感器AP系列
激光位移傳感器SL系列
3D線光譜共焦傳感器AS系列
晶圓厚度/TTV/翹曲自動測量設備APS系列

-
人形機器人
+關注
關注
7文章
718瀏覽量
17582 -
白光干涉儀
+關注
關注
0文章
146瀏覽量
2468
發(fā)布評論請先 登錄
納芯微磁傳感器技術推動人形機器人性能提升

LabVIEW的六軸工業(yè)機器人運動控制系統(tǒng)
人形機器人設計中,哪些關鍵部位需要功率器件?典型電壓/電流參數(shù)如何設計?
HCTL-2020 解碼器及其在多關節(jié)機器人運動控制中的應用
機器人的主要技術參數(shù)
推薦!藍牙心率運動手環(huán)/MTK定位電話手表/人形街舞機器人開發(fā)文檔資料
關于可穿戴型下肢助力機器人感知系統(tǒng)研究
機器人關節(jié)用什么電機?
高動態(tài)人形機器人“夸父”通過OpenHarmony 3.2 Release版本兼容性測評
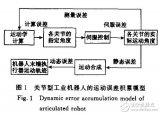
基于關節(jié)型機器人運動誤差分析
為什么使用減速器代替電機轉(zhuǎn)速來控制機器人關節(jié)運動?
中科本原推出面向人形機器人的關節(jié)電機解決方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論