 Nullmax端到端自動駕駛最新研究成果入選ICCV 2025
Nullmax端到端自動駕駛最新研究成果入選ICCV 2025

近日,國際計算機視覺大會 ICCV 2025 正式公布論文錄用結果,Nullmax 感知團隊在端到端自動駕駛方向的最新研究成果《HiP-AD: Hierarchical and Multi-Granularity Planning with Deformable Attention for Autonomous Driving in a Single Decoder》成功入選,彰顯 Nullmax 在一段式端到端核心技術上的深厚積累與創新實力,尤其在端到端自動駕駛系統設計領域的研究已處于行業領先水平。
作為全球計算機視覺三大頂會之一,ICCV(International Conference on Computer Vision)由 IEEE 主辦,每兩年舉辦一次,匯聚全球學術界與工業界的前沿研究成果。ICCV 2025 共收到 11,239 篇投稿,規模遠超往屆。最終,共計 2,699 篇論文獲錄用 ,錄取率僅為 24%。在此次Nullmax入選論文中,感知團隊提出了一種全新的端到端模型設計方法——HiP-AD(Hierarchical and Multi-GranularityPlanning forAutonomousDriving),通過統一的 Transformer 解碼器架構,將感知、預測與規劃任務協同整合,實現了端到端閉環控制的整體優化。
具體而言,新方法HiP-AD 的關鍵突破在于:
01多粒度分層規劃查詢
融合時序(Temporal)、空間(Spatial)和駕駛風格(Driving-style)三類軌跡 Waypoints,顯著提升了軌跡規劃的表達力與泛化性。
02可變形注意力機制
模型可精準聚焦于軌跡周邊關鍵區域,更有效地從圖像中提取關鍵特征。
03統一解碼器結構
打破模塊壁壘,感知-預測-規劃任務在同一空間協同優化,使信息流動更加高效。
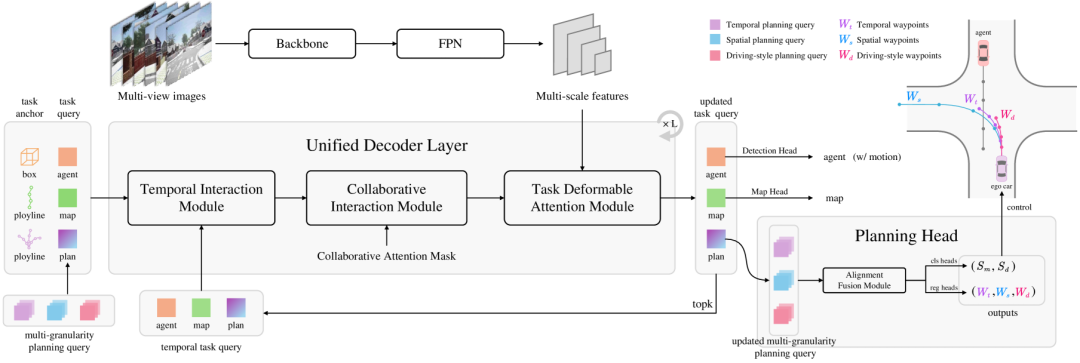
HiP-AD多軌跡生成機制:
選出“最優路徑”,更具“類人”適應力
HiP-AD 在軌跡預測策略上引入了創新性的多軌跡生成機制。區別于僅輸出單一路徑的傳統方法,它能從時間、空間與駕駛風格等多個維度生成多條候選軌跡,并通過系統綜合評估選出最優路徑。這一策略顯著增強了系統面對動態環境變化時的適應能力,提高了復雜駕駛場景下的穩定性與安全性。
HiP-AD 閉環能力:
真實模型可執行,跑得穩,更可靠
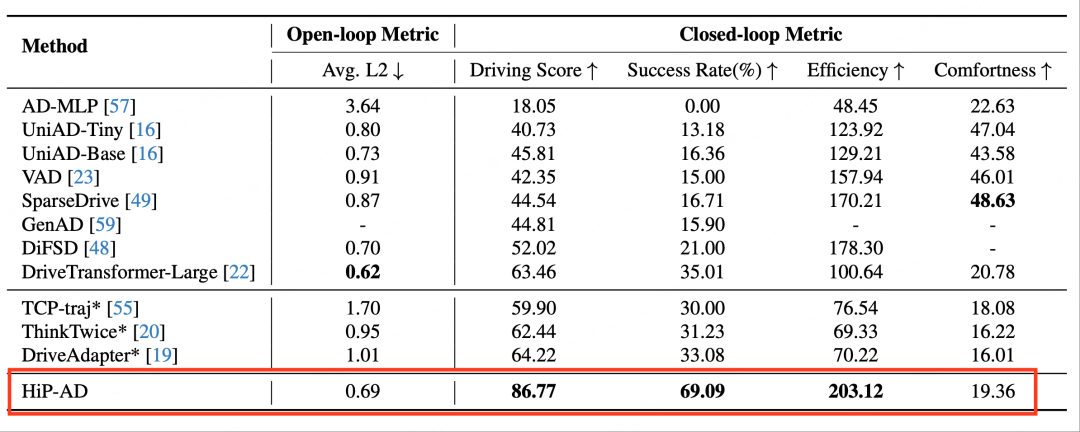
在復雜的實際駕駛環境中,自動駕駛系統常出現“看得懂、想得好,但跑不穩”的問題,即軌跡預測結果看似合理卻難以真實執行。原因在于多數傳統模型依賴開環測試,僅基于歷史數據比對預測軌跡與實際軌跡,缺乏執行層驗證。
HiP-AD 所采用的閉環設計模式,則要求系統控制車輛在復雜環境中完成駕駛任務,能有效應對如障礙物規避、合理變道與突發情況處理等挑戰,全面評估模型的執行與決策能力。
在權威閉環評測基準 Bench2Drive 中,HiP-AD 取得了 SOTA (第一名)的優異成績,大幅領先同等架構設計,驗證了其在真實應用中的執行能力與系統可靠性。
賦能 Nullmax 端到端技術
HiP-AD 助力自動駕駛大腦進化
以加速移動出行智變為目標,Nullmax 多年來擅長將前沿科研成果高效轉化為可商業化、規模化落地的技術應用。在實際應用中,HiP-AD 將為 Nullmax Intelligence(Nullmax 于 2024 年發布的新一代端到端自動駕駛技術)注入更強大、擬人且精準的決策與路徑規劃能力。
接下來,新方法HiP-AD 有望顯著增強 Nullmax Intelligence 在城市、高速等復雜場景下的環境理解與自主決策能力,全面提升Nullmax輔助駕駛系列方案的智能化水平與用戶體驗。
結語
一直以來,Nullmax 專注于打造以純視覺為核心的平臺化輔助駕駛方案。在前沿技術引領方面,Nullmax團隊研究成果已多次入選國際頂會 CVPR、ECCV 與 ICCV,研究方向覆蓋自動駕駛的視覺感知、規劃決策、端到端系統等核心技術路徑。與此同時,Nullmax 始終堅持科研技術與量產落地并重,持續推動創新成果從學術層面走向產品應用。
在自動駕駛技術快速演進的今天,我們歡迎有志于推動行業進步的優秀人才加入 Nullmax,點擊下方“閱讀原文”查看崗位詳情,一起智變未來吧!
-
解碼器
+關注
關注
9文章
1172瀏覽量
41890 -
計算機
+關注
關注
19文章
7651瀏覽量
90598 -
自動駕駛
+關注
關注
788文章
14287瀏覽量
170360
原文標題:Nullmax 論文入選 ICCV 2025!HiP-AD 提出一段式端到端模型設計新方法
文章出處:【微信號:Nullmax,微信公眾號:Nullmax紐勱】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
為什么自動駕駛端到端大模型有黑盒特性?

理想汽車八篇論文入選ICCV 2025
端到端數據標注方案在自動駕駛領域的應用優勢


自動駕駛中基于規則的決策和端到端大模型有何區別?

東風汽車推出端到端自動駕駛開源數據集
端到端在自動泊車的應用


Waymo利用谷歌Gemini大模型,研發端到端自動駕駛系統
Mobileye端到端自動駕駛解決方案的深度解析


理想汽車加速自動駕駛布局,成立“端到端”實體組織
Nullmax正式推出新一代自動駕駛技術Nullmax Intelligence






 工商網監
工商網監
評論