 GAN功率器件在機器人上的應用實踐
GAN功率器件在機器人上的應用實踐

來源:硬蛋攻城獅
1 簡述
GaN器件當前被稱作HEMT(高電子遷移率晶體管),此類高電子遷移率的晶體管應用于諸多電子設備中,如全控型電力開關、高頻放大器或振蕩器。與傳統的硅金屬氧化物半導體場效應晶體管 (MOSFET) 相比,氮化鎵 (GaN) 可提高功率密度和效率,GaN 和 SiC 均具有寬帶隙,但它們之間存在根本差異,因此分別適合特定的拓撲和應用。
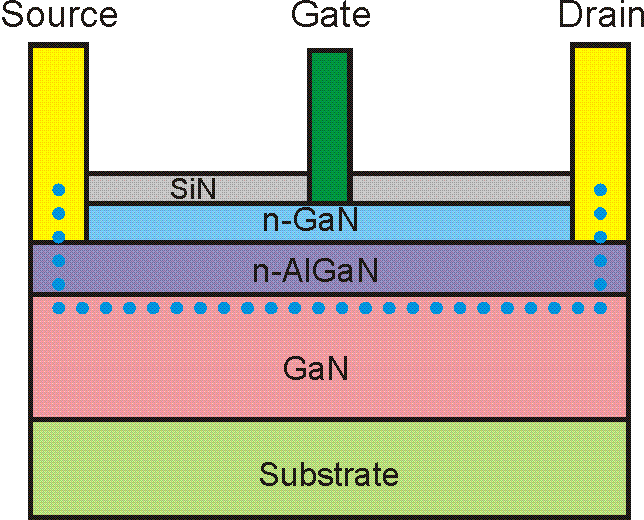
GaN HEMT的工作原理是:當柵極電壓變化時,會在GaN溝道層形成一個電子氣,這個電子氣會隨著柵極電壓的變化而移動,形成一個電流。由于GaN材料的高電子遷移率和高飽和電流密度,GaN HEMT具有更高的開關速度和功率密度。
2 GAN類型
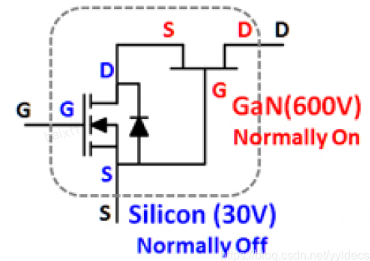
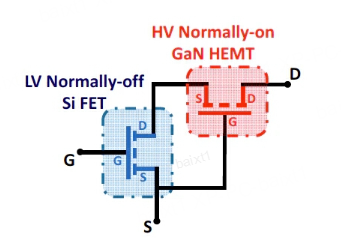
基于GaN的HEMT市面上主要有兩種,一種是基于溝道技術的增強型HEMT(e-HEMT),另一種是級聯型HEMT(Cascode HEMT)。相比級聯型HEMT,增強型HEMT擁有更低的EMI,無反向恢復損耗,且擁有正的溫度特性從而更容易并聯使用。下圖展示了級聯型HEMT結構。
3 參數
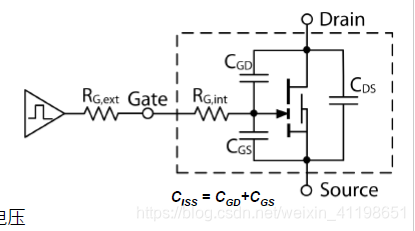
3.1可以通過改變RG控制開關速,
VGSth典型值為1.5V;VG最大額定值為-20/+10V;
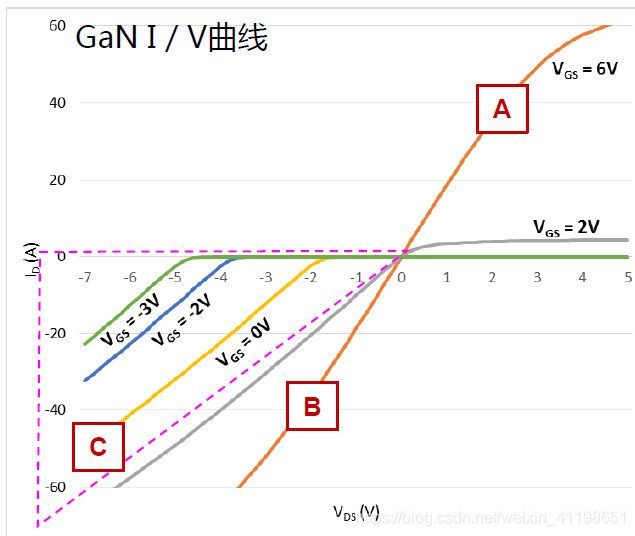
若柵極和源極之間電壓小于開啟電壓,加正壓無正向電流,加反壓有反向電流但反向壓降較大。
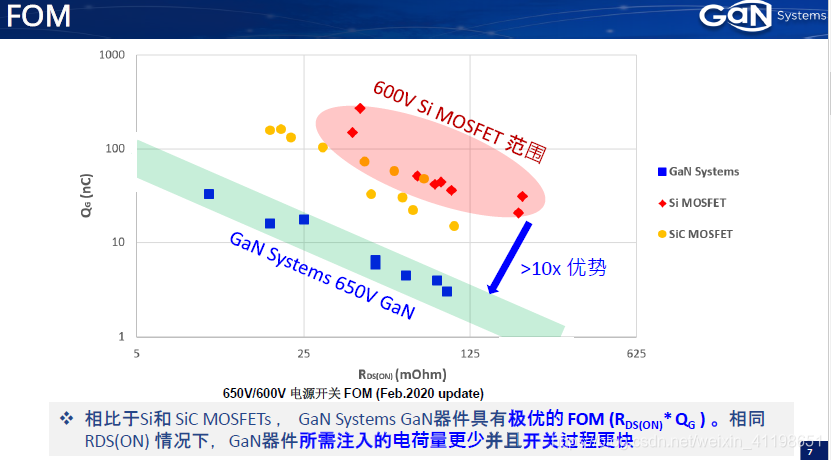
3.2 與SI參數對比
3.3 反向導通特性
DS之間的導通是通過中間的電子層,所以可以雙向導通,即常開。
3.4 E-GAN無體二極管
GAN體內沒有寄生二極管即非常小的Trr,在續流方面有很大優勢,無反向恢復,Qrr=0,沒有PN結。由于 SiC FET 結構中存在體二極管, 所以它會出現反向恢復損耗。典型的 SiC FET 有大于 85nC 的反向恢復電荷。
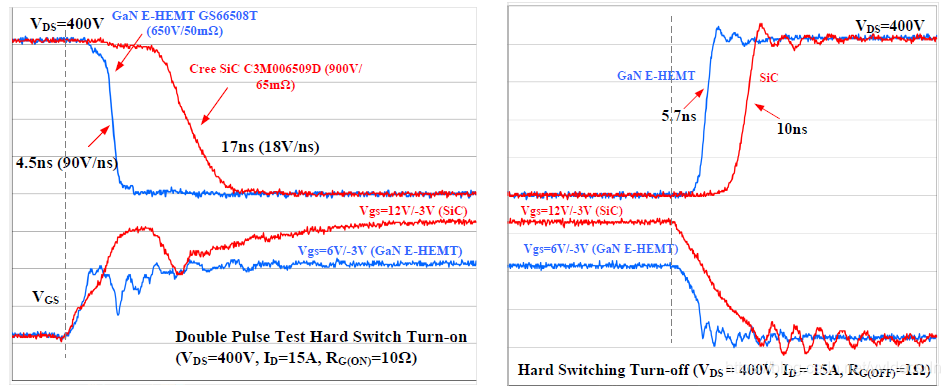
3.5 更快的開關速度
集成柵極驅動器的新一代 GaN 器件開關速度可達 150V/ns,損耗比 SiC 低 82%,比 分立式 GaN FET 低 63%。下面圖展示了GaN HEMT在硬開關模式下,擁有更快的開通和關斷速度:
3.6 死驅時間
GaN HEMT沒有體二極管。GAN器件的反向傳導壓降與V(GS(OFF))成比例增加。在死區時間內,2DEG的行為就像一個二極管,V(F )= V(TH(GD))+ V(GS(OFF))+ I(SD)* R(SD(ON))。
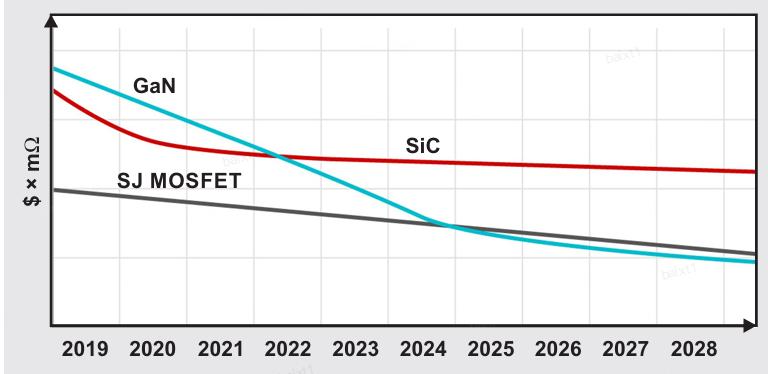
4 成本
GaN 通過消除有源和無源器件,使用更小、更輕的磁性元件,并降低系統的冷卻需求,可實現顯著的系統及成本節約。但是,實現的節省遠不止這些,GaN 有望進一步降低器件成本,業界對GAN成本評估預測如下圖所示。
5 驅動
5.1 D-mode GAN驅動
按照應用場景差異,GaN需要隔離或非隔離、低邊或自舉、零伏或負壓關斷等多種驅動方式,由于按照柵極特性差異,GAN分為常開的耗盡型(D-mode)和常關的增強型(E-mode)。D-mode GaN從常開型變為常關型,主要包括級聯(Cascode)和直驅(Direct Drive)兩種技術架構;其中,級聯型的D-mode GaN更為主流。如下圖,級聯型的D-mode GaN是通過利用低壓Si MOSFET的開關帶動整體的開關,從而將常開型變為常關型。
D-mode GaN最大的優勢在于可用傳統Si MOS的驅動電路,以0V/12V電平進行關/開的控制。但需要注意的是,盡管驅動電路和Si MOS相同,但由于級聯架構的D-mode GaN的開關頻率和速度遠高于傳統的Si MOS,所以要求驅動IC能夠在很高的dv/dt環境下正常工作。
5.2 E-Mode GAN驅動
不同于D-mode GaN通過級聯低壓Si MOS來實現常關型,E-mode GaN直接對GaN柵極進行p型摻雜來修改能帶結構,改變柵極的導通閾值,從而實現常斷型器件。根據柵極結構不同,E-mode GaN又分為歐姆接觸的電流型和肖特基接觸的電壓型兩種技術路線,其中電壓型E-mode GaN最為主流。
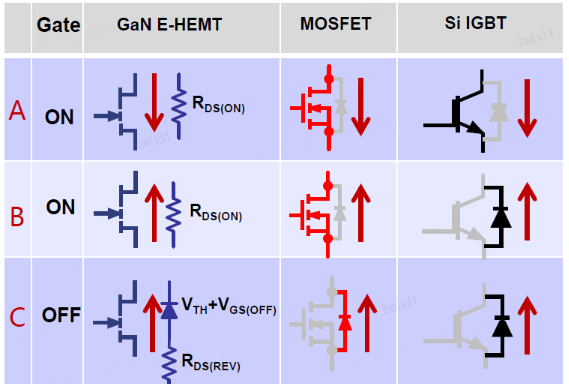
GaN/Si MOS/IGBT 不同狀態下電流路徑
考慮E-mode GaN的以上驅動特性,對驅動器和驅動電路的設計一般需要滿足:
具備100V/ns以上的CMTI,以滿足高頻應用的抗擾能力;
可提供5~6V的驅動電壓,并且驅動器最好集成輸出級LDO;
驅動器最好有分開的OUTH和OUTL引腳,從而不必通過二極管來區分開通和關斷路徑,避免了二極管壓降造成GaN誤導通的風險;
在高壓、大功率應用特別是硬開關拓撲,可以提供負壓關斷能力;
盡可能小的傳輸延時和傳輸延時匹配,從而可以設定更小的死區時間,以減小死區損耗。
在低電壓、小功率,或對死區損耗敏感的應用中,一般可使用0V電壓關斷;但是在高電壓、大功率系統中,往往推薦采用負壓關斷來增強噪聲抗擾能力,保證可靠關斷。在設計柵極關斷的負壓時,除了需要考慮GaN本身的柵極耐壓能力外,還需要考慮對效率的影響。如下表所示,這是因為E-mode GaN在關斷狀態下可以實現電流的反向流動即第三象限導通,但是反向導通壓降和柵極關斷的負壓值相關,用于柵極關斷的電壓越負,反向壓降就越大,相應的會帶來更大的死區損耗。一般,對于500W以上高壓應用,特別是硬開關,推薦-2V~-3V的關斷負壓。常用的驅動方式有以下2種方案:
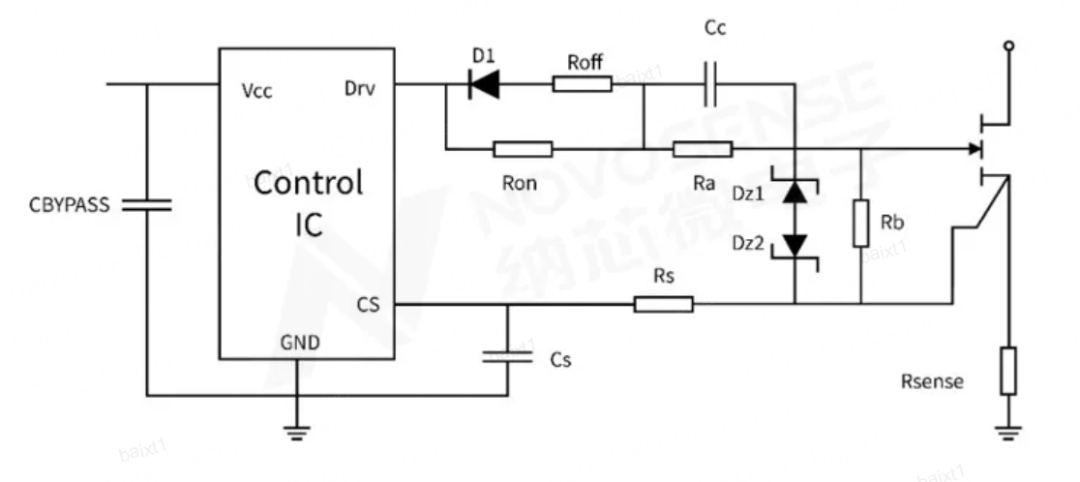
1、阻容分壓式方案,E-mode GaN可以采用傳統的Si MOS驅動器來設計驅動電路,需要通過阻容分壓電路做降壓處理。
需要電阻、電容、穩壓管設計外圍電路,這種驅動方案可以采用普通的Si MOSFET驅動芯片,如下圖所示,當驅動開通時,圖中Cc與Ra并聯后和Rb串聯,將驅動供電電壓(如10V)進行分壓后,為GaN柵極提供6V驅動導通電壓,Dz1起到鉗位正壓的作用;當驅動關斷時,Cc電容放電為GaN柵極提供關斷負壓,Dz2起到鉗位負壓的作用。
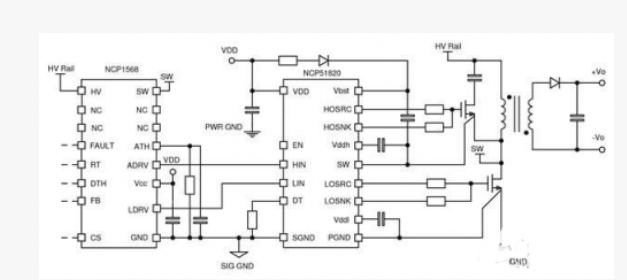
2、直驅式方案
無需電阻、電容、穩壓管等外圍電路
6 損耗
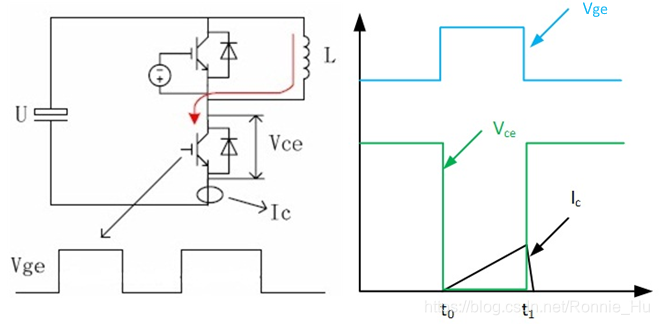
6.1 雙脈沖測試
雙脈沖測試可以獲取開關管開關過程中的參數,通過測試結果評估驅動電阻是否合適,是否需要吸收電路等。而且可以衡量開關管在實際工作中的表現,主要有反向恢復電流,關斷電壓尖峰,開通關斷時間等
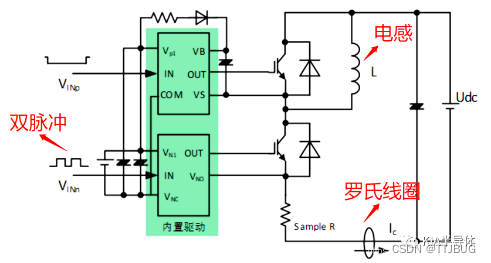
1)t0時刻,門極發出第一個脈沖,下橋MOS飽和導通,電壓U加在負載L兩端,電感的電流線性上升。
2)t1時刻,下橋MOS關斷,電感電流由上橋二極管續流,電流波形如虛線所示,由于電流探頭放在下橋的發射極,因此,在上橋二極管續流時,電流探頭檢測不到該電流。
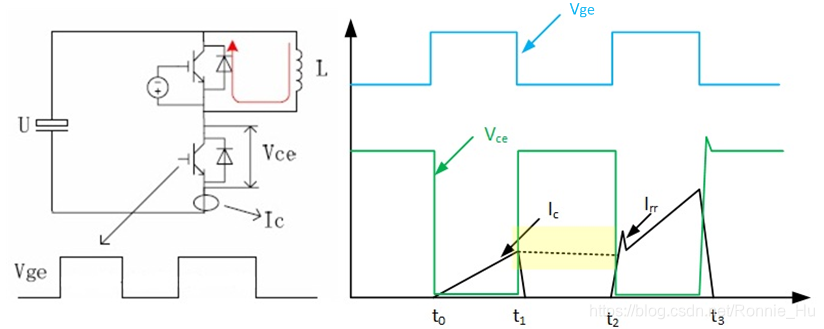
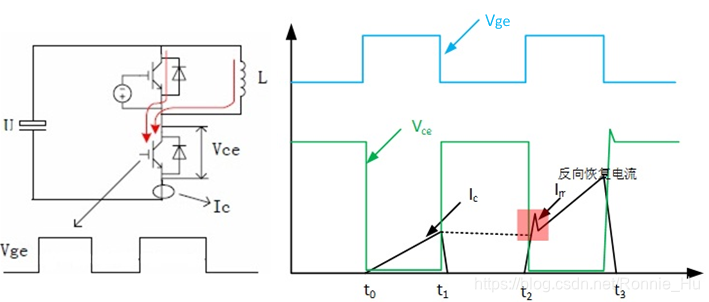
3)t2時刻,第二個脈沖的上升沿到達,下橋MOS再次導通,上橋續流二極管反向恢復,反向恢復電流會穿過下橋MOS,電流探頭上能捕捉到這個電流。在該時刻,重點觀察MOS的開通過程。
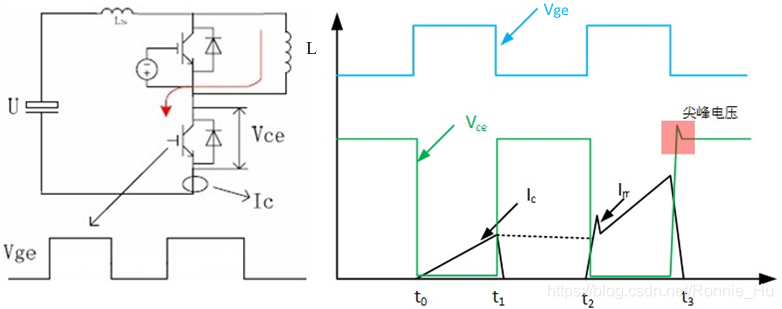
4)t3時刻,下橋MOS再次關斷,此時電流變化較大,由于母線雜散電感Ls的存在,Vce會產生一定的電壓尖峰。在該時刻,重點觀察MOS的關斷過程。Vce電壓尖峰是重要的監控對象,同時還需關注關斷之后電壓和電流是否存在異常振蕩。
雙脈沖測試問題注意:
(1)要想獲得較為精確的測量值,對測試儀器有很大要求,一般采用高壓探頭取Vge、Vce,羅氏線圈電流探頭取Ic,對于驅動信號可以采用普通探頭獲得。同時,對探頭進行校準,盡量減小測量儀器帶來的誤差。
(2)調整柵極電阻Rgon,用以確定Rgon的數值是否合適。并且調整優化GAN的VDS與ID波形,切勿出現電流嚴重拖尾,VDS打嗝。
(3)負載電感可以使用自己繞制的空心電感,或者購買相應的空心電感,不要使用磁粉芯電感,瞬間大電流會影響磁粉芯電感的電感值,從而對測試結果造成影響。
(4)直流側需要高壓電源,一般情況下,為保護儀器,可以用多個電容串并聯,使用高壓電源為電容充電,然后給被測電路供電。
(5)雙脈沖信號信號發生器產生,信號發生器輸出有50Ω或者1MΩ,不同的阻抗輸出電壓值會不同,測試前需使用示波器觀察發生器的波形是否滿足預期,以免影響測試結果。
6.2 雙脈沖仿真
搭建仿真平臺
采樣電阻雜感2nh
母線加RC
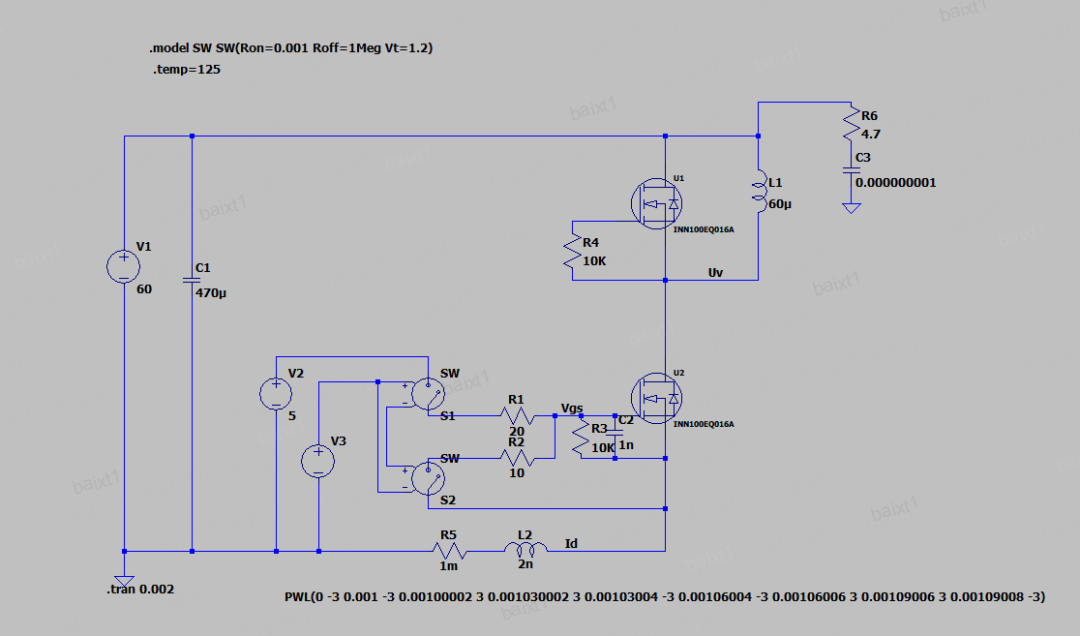
仿真結果:采樣電阻2nh雜感情況
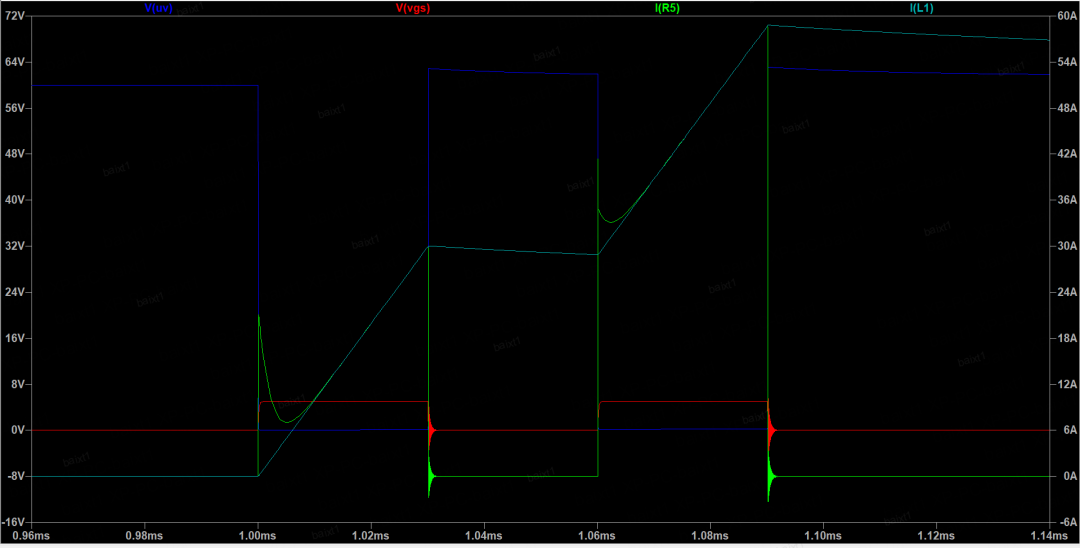
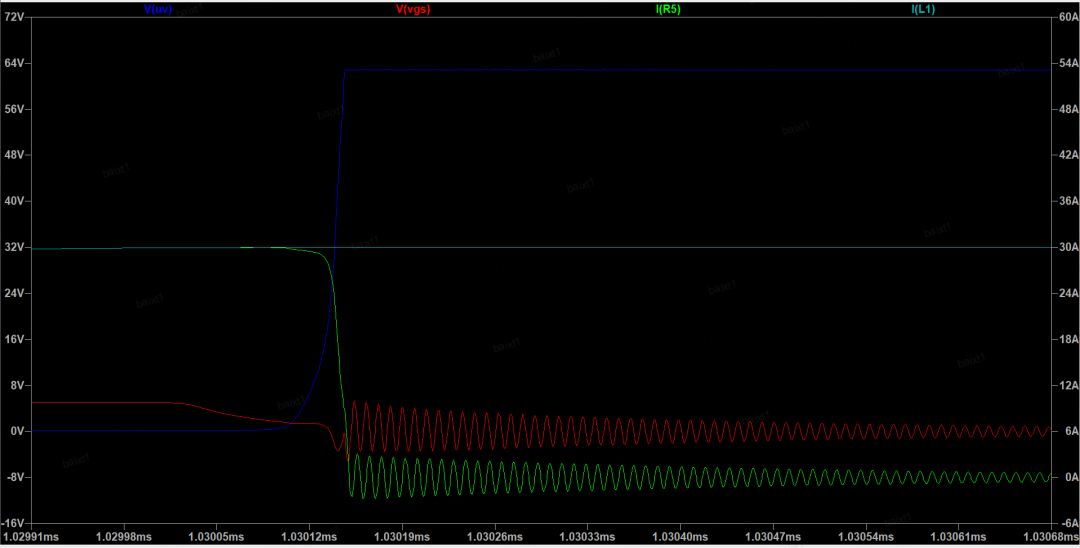
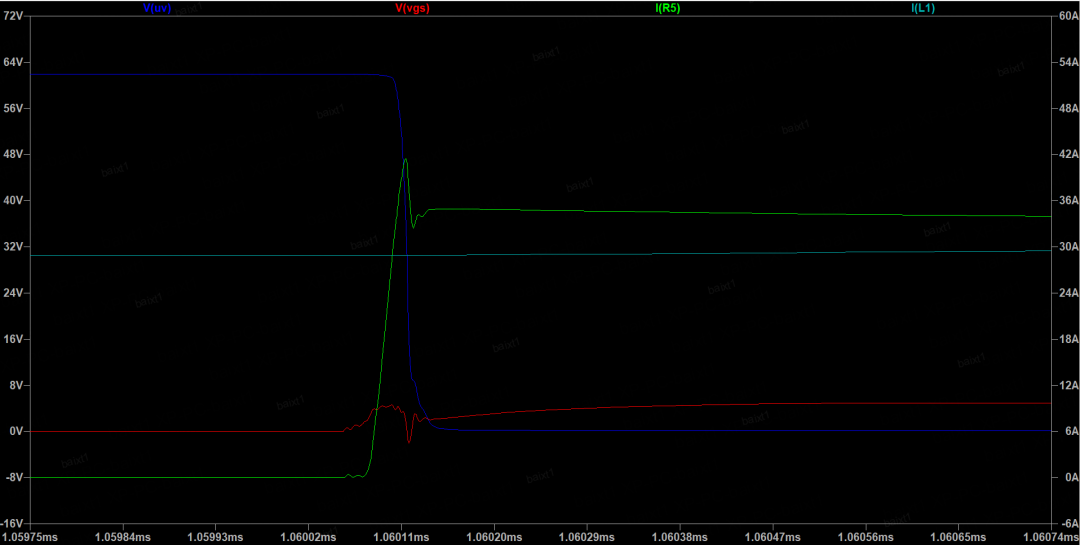
仿真結果可見,下管采樣電阻雜感等寄生參數影響波形,形成LC震蕩。下管開通時,由于上管的反向恢復電流影響,在IR5處測得電流出現回溝。
結語
應用實例:人形機器人已經在酒店服務、機場安全等領域得到應用,預計未來將在更多領域發揮作用。
勞動力缺口:人形機器人有潛力填補因出生率下降導致的勞動力缺口,維持經濟穩定和提高生活質量。
技術進步:GaN技術的持續進步將推動人形機器人向更高效、可靠和能力的方向發展。
-
機器人
+關注
關注
213文章
29706瀏覽量
212655 -
晶體管
+關注
關注
77文章
10015瀏覽量
141510 -
SiC
+關注
關注
31文章
3222瀏覽量
65080 -
GaN
+關注
關注
19文章
2204瀏覽量
76710 -
低功率器件
+關注
關注
0文章
4瀏覽量
5999
原文標題:GAN功率器件在機器人上應用實踐
文章出處:【微信號:芯長征科技,微信公眾號:芯長征科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
《機器人設計與實現》——低成本DIY機器人,一本機器人制作的經典入門書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
什么是工業機器人
教育機器人方興未艾,你了解多少?
第三代半導體氮化鎵GaN技術給機器人等應用帶來什么樣的革新
功率放大器基于振動驅動的旋轉及攀爬軟體機器人的研究
功率放大器基于振動驅動的旋轉及攀爬軟體機器人的研究
基于視覺的機器人SLAM入門實踐
探討 GaN FET 在人形機器人中的應用優勢





 工商網監
工商網監
評論