") 從“三共計(jì)算”到生態(tài)重塑,艙駕融合開(kāi)啟智駕新范式
從“三共計(jì)算”到生態(tài)重塑,艙駕融合開(kāi)啟智駕新范式

在汽車(chē)智能化浪潮下,傳統(tǒng)智能座艙與智能駕駛分離的電子電氣架構(gòu),因硬件冗余、成本高、信號(hào)穩(wěn)定性差等弊端,難以滿足用戶需求和技術(shù)發(fā)展,使得“艙駕融合”概念應(yīng)運(yùn)而生。通過(guò)將智能座艙域與智能駕駛域整合到一個(gè)高性能計(jì)算單元,艙駕融合實(shí)現(xiàn)了硬件共用、功能協(xié)同,以及降本增效。本文將聚焦這一話題,深度探討艙駕融合過(guò)程中面臨的機(jī)遇與挑戰(zhàn)。
從分布式到“三共計(jì)算”
第三方數(shù)據(jù)顯示,截至2024年10月末,艙駕智能的滲透率已經(jīng)達(dá)到了41.75%。2025年開(kāi)始,這一市場(chǎng)份額還會(huì)繼續(xù)上升,預(yù)計(jì)在政策、技術(shù)和市場(chǎng)等多方因素驅(qū)動(dòng)下,15萬(wàn)人民幣以上的車(chē)型都能率先采用艙駕融合技術(shù)。那么,“艙駕融合”又是如何實(shí)現(xiàn)智能座艙與智能駕駛“大腦共用、數(shù)據(jù)共通、算力共享”的呢?
Imagination公司產(chǎn)品管理副總裁Dennis Laudick表示,汽車(chē)行業(yè)正處于汽車(chē)電子架構(gòu)集中化的進(jìn)程中。過(guò)去,車(chē)輛配備了大量分布在車(chē)身各處的小型處理器,每個(gè)處理器負(fù)責(zé)一項(xiàng)簡(jiǎn)單功能。如今,這些小型處理器的功能正逐漸整合到更大、更高性能的系統(tǒng)級(jí)芯片(SoC)中,由后者處理整個(gè)功能域——例如管理整個(gè)高級(jí)駕駛輔助系統(tǒng)(ADAS)或整個(gè)座艙體驗(yàn)。

Imagination公司產(chǎn)品管理副總裁Dennis Laudick
這種方法帶來(lái)了諸多優(yōu)勢(shì),從降低車(chē)輛復(fù)雜性(實(shí)實(shí)在在地減少了數(shù)英里的布線),到實(shí)現(xiàn)更全面的決策制定,以及在軟件定義汽車(chē)的時(shí)代更便捷的空中升級(jí)(OTA)。而艙駕融合將這些優(yōu)勢(shì)進(jìn)一步延伸,它將負(fù)責(zé)渲染信息娛樂(lè)屏幕、座艙屏幕和抬頭顯示,以及處理駕駛員監(jiān)控等功能的座艙控制器,與ADAS控制器融合。
舉例來(lái)說(shuō),在下一代自動(dòng)駕駛車(chē)輛中,負(fù)責(zé)駕駛的同一個(gè)計(jì)算單元可實(shí)時(shí)獲取駕駛員狀態(tài)相關(guān)數(shù)據(jù):他們是否清醒?是否在使用手機(jī)?是否在與乘客交談?當(dāng)需要將車(chē)輛控制權(quán)交還給駕駛員時(shí),車(chē)輛能夠知曉這需要多長(zhǎng)時(shí)間,并據(jù)此做出規(guī)劃。
另一方面,隨著汽車(chē)計(jì)算的集中化以及車(chē)輛的全面電動(dòng)化改變了汽車(chē)的構(gòu)成,我們看到的最大轉(zhuǎn)變是汽車(chē)主機(jī)廠開(kāi)始自行設(shè)計(jì)芯片,并全面掌控車(chē)輛的客戶體驗(yàn)。比亞迪就是一個(gè)典型案例:該公司已宣布向半導(dǎo)體和自動(dòng)駕駛技術(shù)投資1000億元。
因此,在客戶體驗(yàn)方面,將駕駛輔助系統(tǒng)與座艙集成有望實(shí)現(xiàn)手動(dòng)駕駛模式與自動(dòng)駕駛模式之間更平滑的切換。通過(guò)將物體檢測(cè)數(shù)據(jù)接入抬頭顯示(HUD),將有助于提升手動(dòng)駕駛模式下的駕駛安全性——例如高亮顯示危險(xiǎn)物或車(chē)速標(biāo)志。在此場(chǎng)景中,將物體檢測(cè)模型與增強(qiáng)現(xiàn)實(shí)(AR)顯示集成在單一控制器上,既能減少運(yùn)行此類(lèi)體驗(yàn)所需的數(shù)據(jù)傳輸量,也能簡(jiǎn)化軟件開(kāi)發(fā)流程。
芯擎科技創(chuàng)始人、董事兼CEO汪凱博士則從三方面做了更進(jìn)一步的說(shuō)明:

芯擎科技創(chuàng)始人、董事兼CEO汪凱博士
(1)大腦共用:從分布式到集中式架構(gòu)的演進(jìn)
傳統(tǒng)汽車(chē)電子架構(gòu)中,智能座艙與智能駕駛系統(tǒng)通常采用獨(dú)立的ECU或域控制器,導(dǎo)致硬件冗余和協(xié)同效率低下。而艙駕融合通過(guò)中央計(jì)算平臺(tái)(如單芯片或多芯片集成方案)將兩者功能集成至同一“大腦”,通過(guò)高算力SoC芯片,集成CPU、GPU、NPU等計(jì)算單元,實(shí)現(xiàn)硬件的整合。同時(shí)通過(guò)虛擬化技術(shù)或容器化技術(shù),在單一硬件平臺(tái)上運(yùn)行多個(gè)操作系統(tǒng),實(shí)現(xiàn)座艙與智駕功能的邏輯隔離與資源共享。
(2)數(shù)據(jù)共通:艙駕融合的核心是數(shù)據(jù)閉環(huán)的構(gòu)建,比如:
感知系統(tǒng)復(fù)用:攝像頭、毫米波雷達(dá)、超聲波雷達(dá)等傳感器數(shù)據(jù)同時(shí)服務(wù)于座艙AVM、HUD、DMS與輔助駕駛的感知、定位模塊等系統(tǒng),接口復(fù)用可以減少線束和系統(tǒng)成本,提供融合系統(tǒng)性價(jià)比。
片內(nèi)計(jì)算任務(wù)的多IP協(xié)作與數(shù)據(jù)傳輸?shù)膬?yōu)化,提升芯片算力與能效比,形成完整的片上互連、神經(jīng)網(wǎng)絡(luò)加速方案,適配智能座艙數(shù)據(jù)流高帶寬、智能駕駛數(shù)據(jù)流低延遲的關(guān)鍵性性能要求。
片間數(shù)據(jù)交互:通過(guò)高速以太網(wǎng)、PCIe總線,或是企業(yè)自研的高速互聯(lián)通路協(xié)議,實(shí)現(xiàn)不同系統(tǒng)的高帶寬低延遲的互聯(lián)互通,提供多顆SOC級(jí)聯(lián)的擴(kuò)展能力。
(3)平臺(tái)化交付,架構(gòu)同源,軟件同源,協(xié)同高效
這里所說(shuō)的軟件架構(gòu)平臺(tái)化適配,是指中間件與底層硬件耦合,屏蔽芯片的復(fù)雜性,芯片級(jí)適配優(yōu)化能力由芯片企業(yè)完成。中間件與算法,系統(tǒng)調(diào)度,應(yīng)用軟件解耦,開(kāi)放算法移植優(yōu)化的能力給到第三方。
這一過(guò)程中,芯片固件和驅(qū)動(dòng)保持一致,提供量產(chǎn)質(zhì)量標(biāo)準(zhǔn)的參考設(shè)計(jì),提高芯片快速量產(chǎn)能力及產(chǎn)品可靠性與穩(wěn)定性。同時(shí),信息安全采用同源IP實(shí)現(xiàn),保障數(shù)據(jù)安全端到端的能力;功能安全采用智能駕駛芯片標(biāo)準(zhǔn),為高階艙駕融合提供安全基礎(chǔ)。
算力與安全的平衡
“知易行難”。盡管人們最終希望通過(guò)芯片和算法支持的一系列解決方案,能夠提升用戶的核心體驗(yàn):更安全、更智能、更個(gè)性化。但在汽車(chē)中實(shí)現(xiàn)座艙與ADAS功能的融合或者集成,不但需要具備性能強(qiáng)大、靈活性及功能安全性極高的處理器,還要在功耗、功能安全等諸多方面達(dá)成目標(biāo)。
汪凱博士對(duì)此表示認(rèn)同,并指出,在算力方面,艙駕融合芯片需要具備強(qiáng)大的綜合算力,能夠同時(shí)支持智能駕駛和智能座艙的多種復(fù)雜運(yùn)算,并且要具備靈活的算力分配機(jī)制,以適應(yīng)不同場(chǎng)景的算力需求。
“智能駕駛領(lǐng)域,如城市NOA等功能,需要處理大量傳感器數(shù)據(jù),且算法模型已經(jīng)演進(jìn)到BEV+Transformer等更復(fù)雜的形式,對(duì)浮點(diǎn)算力、向量計(jì)算資源以及訪存容量和帶寬要求很高。同時(shí),智能座艙也引入生成式AI大模型,強(qiáng)化人機(jī)交互體驗(yàn),這也讓芯片需要處理更復(fù)雜的任務(wù),運(yùn)行算法的復(fù)雜度、模型參數(shù)以及數(shù)據(jù)規(guī)模大幅上升。“汪凱博士說(shuō)。
此外,艙駕融合系統(tǒng)還涉及到車(chē)輛的關(guān)鍵駕駛功能和座艙安全,對(duì)功能安全要求極高。芯片需要滿足車(chē)規(guī)級(jí)安全認(rèn)證,比如達(dá)到ASIL–D安全等級(jí),包括硬件冗余、錯(cuò)誤檢測(cè)和糾正、安全啟動(dòng)和加密等功能,以確保在各種復(fù)雜的工況下都能穩(wěn)定、可靠地運(yùn)行,保障駕乘人員的安全。在一些極端情況下,即使中控等全部屏幕都黑屏,芯片也必須保證儀表屏的正常運(yùn)轉(zhuǎn),確保駕駛者可以得到必要的車(chē)輛提示。
為此,芯擎科技從SoC芯片架構(gòu)和軟件架構(gòu)角度針對(duì)“艙駕融合”進(jìn)行了突破性的設(shè)計(jì)和應(yīng)用實(shí)現(xiàn)。首先,在車(chē)規(guī)SoC芯片架構(gòu)方面,集成動(dòng)態(tài)分區(qū)的QM、ASIL-B、ASIL-D算力,實(shí)現(xiàn)艙、駕融合應(yīng)用場(chǎng)景的適配,并減少對(duì)虛擬化軟件的依賴(lài),能夠快速實(shí)現(xiàn)軟件的遷移和調(diào)優(yōu)適配。
其次,高帶寬低延遲存儲(chǔ)架構(gòu),針對(duì)視覺(jué)流、大模型數(shù)據(jù)訪存量激增的問(wèn)題,基于多級(jí)分布式緩存方案,設(shè)計(jì)高通量高效率存儲(chǔ)子系統(tǒng)架構(gòu),提升關(guān)鍵應(yīng)用和核心處理單元訪問(wèn)存儲(chǔ)系統(tǒng)的吞吐量,實(shí)現(xiàn)片內(nèi)帶寬壓縮技術(shù),減少計(jì)算密集型任務(wù)訪存壓力。
第三,高性能加解密引擎,針對(duì)智駕芯片的信息安全要求和國(guó)密算法標(biāo)準(zhǔn),實(shí)現(xiàn)提升信息安全和功能安全協(xié)同的技術(shù)方法。基于安全啟動(dòng)、可信計(jì)算和安全域劃分體系架構(gòu),實(shí)現(xiàn)信息安全島SoC體系的管理.。
Dennis的看法是,在這兩個(gè)場(chǎng)景中,ADAS控制器通常有更高的性能和安全要求,可能需達(dá)到2000TOPS的AI算力,并支持多項(xiàng)ASIL-D級(jí)任務(wù)(功能安全的最高等級(jí))。相較之下,座艙控制器的安全與AI需求較低,僅需ASIL-B級(jí)安全標(biāo)準(zhǔn),以及約20TOPS的AI算力,用于駕駛員監(jiān)控和環(huán)視攝像頭拼接等任務(wù);但該控制器需在尺寸不斷增大的顯示屏上渲染用戶界面,可能還需支持乘客娛樂(lè)功能——32ppc的GPU應(yīng)能處理所有這些屏幕的像素處理需求。
因此,將這些功能整合到單一控制器中,僅意味著在現(xiàn)有ADAS控制器的AI性能基礎(chǔ)上增加約10%,并集成功能安全GPU(如Imagination提供的GPU,已應(yīng)用于全球眾多主流汽車(chē)品牌的座艙系統(tǒng))。
隨著控制器需要承載更多操作系統(tǒng)并同時(shí)處理更多功能,系統(tǒng)中的每個(gè)處理器都需配備先進(jìn)的虛擬化解決方案。許多方案采用虛擬機(jī)監(jiān)控程序(hypervisor),但這可能給系統(tǒng)帶來(lái)不必要的開(kāi)銷(xiāo)。相比之下,基于硬件的虛擬化方案效率更高,且配備精細(xì)的服務(wù)質(zhì)量(QoS)和工作負(fù)載優(yōu)先級(jí)協(xié)議,在多域汽車(chē)控制器領(lǐng)域優(yōu)勢(shì)更為顯著。
大規(guī)模商用,仍存挑戰(zhàn)
在Dennis看來(lái),盡管如今已有支持座艙—駕駛集成的處理器,然而,汽車(chē)市場(chǎng)從半導(dǎo)體設(shè)計(jì)到芯片量產(chǎn),再到車(chē)輛交付消費(fèi)者,存在較長(zhǎng)的前置周期。這一開(kāi)發(fā)周期中,很大比例用于軟件開(kāi)發(fā)——需要開(kāi)發(fā)新代碼,將座艙與ADAS控制器的所有功能整合到新芯片上,還需額外編寫(xiě)代碼,利用功能域的統(tǒng)一為車(chē)內(nèi)乘客帶來(lái)新體驗(yàn)。
“為縮短電動(dòng)化、軟件定義汽車(chē)所需的海量代碼開(kāi)發(fā)時(shí)間,我們看到許多供應(yīng)商采用‘左移’開(kāi)發(fā)理念,在硬件仍處于研發(fā)階段時(shí)即開(kāi)始軟件準(zhǔn)備,并借助Imagination等供應(yīng)商的先進(jìn)建模系統(tǒng)提供支持。”他說(shuō)。
與此同時(shí),硬件開(kāi)發(fā)者還必須探索如何滿足下一代車(chē)輛對(duì)計(jì)算能力的巨大需求,同時(shí)避免熱節(jié)流效應(yīng)且不影響續(xù)航里程。在遵循“1%規(guī)則”的汽車(chē)行業(yè)中,功耗100W與50W的控制器存在顯著差異。
當(dāng)然,AI大模型的引入也是必須要考慮的問(wèn)題,畢竟隨著L3/L4級(jí)自動(dòng)駕駛落地,“艙駕融合”進(jìn)一步向“車(chē)路協(xié)同+情感化交互”方向升級(jí),已經(jīng)成為大趨勢(shì)。
Dennis認(rèn)為,開(kāi)發(fā)能夠?qū)?chē)內(nèi)乘客情緒做出恰當(dāng)反應(yīng)的車(chē)輛,聽(tīng)起來(lái)或許像天方夜譚,但如今已有技術(shù)可將其變?yōu)楝F(xiàn)實(shí)。經(jīng)典視覺(jué)模型(如卷積神經(jīng)網(wǎng)絡(luò))可通過(guò)攝像頭畫(huà)面處理乘客的情緒。或者,大語(yǔ)言模型能從麥克風(fēng)輸入中解讀情緒。基于這些,當(dāng)乘客注意力過(guò)于分散時(shí),車(chē)輛可判斷是否需要進(jìn)行干預(yù)。
“我尤其喜歡這樣的設(shè)想:車(chē)輛利用其新具備的感知能力,與孤獨(dú)、無(wú)聊或疲憊的駕駛員玩‘我是小間諜(I spy)’這類(lèi)經(jīng)典車(chē)載游戲,幫助他們保持清醒。”
芯片廠商前進(jìn)到了哪里?
“龍鷹一號(hào)”智能座艙芯片和“星辰一號(hào)”全場(chǎng)景高階輔助駕駛芯片,是芯擎科技為艙駕融合提供的底層硬件支持。作為中國(guó)首款7nm車(chē)規(guī)級(jí)智能座艙芯片,“龍鷹一號(hào)”已定點(diǎn)或搭載于領(lǐng)克、銀河、一汽紅旗、德國(guó)大眾歐洲和美洲車(chē)型等30余款主力車(chē)型上。而“星辰一號(hào)”則是芯擎科技在2024年推出的高階輔助駕駛芯片,面向L2至L4級(jí)的智能駕駛,單芯片算力達(dá)512TOPS,4顆級(jí)聯(lián)可達(dá)到2048TOPS,2025年實(shí)現(xiàn)量產(chǎn)。根據(jù)規(guī)劃,2026年,“龍鷹二號(hào)”也將量產(chǎn)。
在與《電子工程專(zhuān)輯》的對(duì)話中,汪凱博士表示,芯擎是國(guó)內(nèi)最早提出“艙行泊一體”的公司,得益于在芯片的最初設(shè)計(jì)階段,芯擎創(chuàng)新性地在其中加入了2顆NPU(而當(dāng)時(shí)主流的海外座艙芯片還沒(méi)有NPU)芯片,最高算力可以達(dá)到8TOPS,這種大算力的支持是“龍鷹一號(hào)”有能力實(shí)現(xiàn)“艙行泊一體”的重要原因之一。
今年3月,芯擎科技在生態(tài)?科技日上發(fā)布了智能座艙和智能駕駛兩大系列解決方案。
在智能座艙系列解決方案中,基于全面的芯片矩陣,芯擎能夠提供從入門(mén)級(jí)智能座艙到高階智能座艙,從“艙行泊一體”到高階艙駕融合的多種芯片組合,基于同樣的車(chē)規(guī)級(jí)SoC芯片架構(gòu),采用同源軟件架構(gòu),適配算力需求,為車(chē)企擁抱智能化浪潮提供及時(shí)、差異化的支持。
在智能駕駛系列解決方案中,能夠覆蓋從L2級(jí)別智駕、高速NOA、城市NOA、全場(chǎng)景智駕到高階艙駕融合的需求。可在最短的時(shí)間內(nèi),提供從主動(dòng)安全、高速NOA、城市NOA以及端到端智駕大模型功能。
同時(shí),基于“星辰一號(hào)”7nm車(chē)規(guī)芯片,芯擎科技搭建了開(kāi)放的全場(chǎng)景生態(tài)平臺(tái):芯擎方舟,分別從芯片基礎(chǔ)能力,操作系統(tǒng)、系統(tǒng)軟件、中間件、算法算子庫(kù)、AI工具鏈,生態(tài)方案等方面開(kāi)放賦能,為客戶提供一站式的算法開(kāi)發(fā)和端到端的大模型部署,同時(shí)具備數(shù)據(jù)流調(diào)優(yōu),規(guī)劃控制整車(chē)適配,以及數(shù)據(jù)閉環(huán)端云結(jié)合的能力。
作為車(chē)載信息娛樂(lè)單元GPU IP的領(lǐng)先供應(yīng)商,Imagination已經(jīng)與瑞薩、德州儀器和安霸(Ambarella)等客戶合作開(kāi)發(fā)下一代汽車(chē)解決方案,包括解決諸如軟件集成和工作負(fù)載分區(qū)等各種各樣的問(wèn)題。
為支持這一需求,Imagination的產(chǎn)品包含一系列行業(yè)中獨(dú)有的功能,以支持此類(lèi)系統(tǒng)設(shè)計(jì),例如:
基于硬件的虛擬化:單個(gè)Imagination GPU可虛擬地劃分為多個(gè)獨(dú)立的“虛擬GPU”,可由完全獨(dú)立的操作系統(tǒng)、線程或虛擬機(jī)獨(dú)立使用。與軟件虛擬化方法不同,Imagination的硬件化方案具有高度穩(wěn)定性,可確保虛擬域之間互不干擾。Imagination的前幾代GPU支持最多8個(gè)虛擬機(jī)或環(huán)境,最新產(chǎn)品支持最多16個(gè)虛擬機(jī)或環(huán)境。
先進(jìn)的服務(wù)質(zhì)量(QoS)和優(yōu)先級(jí)機(jī)制:軟件工程師和系統(tǒng)設(shè)計(jì)師可在從粗略到精細(xì)的多個(gè)層級(jí)上調(diào)整工作負(fù)載的優(yōu)先級(jí)。這項(xiàng)功能得到了各種由硬件支持的機(jī)制的全面支撐,例如搶占和上下文切換超時(shí)等功能作為后盾,確保了優(yōu)先級(jí)系統(tǒng)的穩(wěn)健性。
支持物理分區(qū):GPU核心可在整個(gè)物理芯片或小芯片范圍內(nèi)實(shí)現(xiàn),既可作為單個(gè)GPU使用,也可作為多個(gè)獨(dú)立GPU使用。
憑借這些功能,Imagination的最新產(chǎn)品為SoC設(shè)計(jì)師和整車(chē)廠商(OEM)提供了艙駕融合所需的軟件定義AI和高性能圖形能力,它們?nèi)慷歼_(dá)到ASIL-B功能安全等級(jí),所有或大部分此類(lèi)機(jī)制均可在啟動(dòng)或運(yùn)行時(shí)動(dòng)態(tài)重新配置,且功耗等級(jí)低到智能手機(jī)級(jí)別,而非個(gè)人電腦級(jí)別。
(責(zé)編:Franklin)
-
智能駕駛
+關(guān)注
關(guān)注
4文章
2805瀏覽量
49921 -
汽車(chē)
+關(guān)注
關(guān)注
15文章
3850瀏覽量
39502 -
智能座艙
+關(guān)注
關(guān)注
4文章
1128瀏覽量
16876
發(fā)布評(píng)論請(qǐng)先 登錄
航盛召開(kāi)8775艙駕融合平臺(tái)質(zhì)量宣貫會(huì)
北斗智聯(lián)重磅發(fā)布智馭2.0艙駕融合產(chǎn)品
暢行智駕選擇QNX為艙駕融合域控制器提供技術(shù)支持
英特爾與黑芝麻智能簽署合作備忘錄,聯(lián)合發(fā)布艙駕融合平臺(tái)

芯擎科技發(fā)布史上最全座艙和智駕解決方案,開(kāi)啟“大生態(tài)”模式

四維圖新亮相一汽大眾艙駕融合供應(yīng)商技術(shù)展
中科創(chuàng)達(dá)亮相一汽大眾艙駕融合供應(yīng)商技術(shù)展
都在說(shuō)智駕平權(quán),什么是智駕平權(quán)?如何智駕平權(quán)?
博世艙駕融合解決方案打通整車(chē)的任督二脈
黑芝麻智能、阿里云與斑馬智行攜手共建艙駕融合解決方案
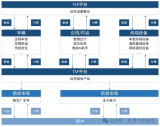
TSP研究:車(chē)內(nèi)網(wǎng)聯(lián)服務(wù)向跨域融合、全場(chǎng)景融合、艙駕融合方向拓展
北斗智聯(lián)艙駕融合產(chǎn)品蟬聯(lián)鈴軒獎(jiǎng)
誠(chéng)邁科技旗下智達(dá)誠(chéng)遠(yuǎn)的FusionOS2.0基于高通SA8775P實(shí)現(xiàn)艙駕融合新體驗(yàn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論