") 一種適用于北斗MEO/IGSO衛(wèi)星的弱信號(hào)捕獲算法
一種適用于北斗MEO/IGSO衛(wèi)星的弱信號(hào)捕獲算法

針對(duì)北斗B1頻段MEO/IGSO衛(wèi)星上NH碼調(diào)制導(dǎo)致捕獲難度增大的問(wèn)題,對(duì)GPS所用的差分捕獲算法進(jìn)行改進(jìn),得出了一種適合北斗B1 MEO/IGSO衛(wèi)星的捕獲算法。通過(guò)本地生成經(jīng)NH調(diào)制的C/A碼作為新的偽隨機(jī)碼,加長(zhǎng)相干積分時(shí)間,以差分累加的方式對(duì)相干積分結(jié)果進(jìn)行運(yùn)算,并按照累加結(jié)果最大準(zhǔn)則判斷差分項(xiàng)的符號(hào),找出最佳搭配組合。仿真結(jié)果表明,改進(jìn)算法能提高2 dB~3 dB的增益。
0 引言
信號(hào)捕獲是處理衛(wèi)星信號(hào)的必要步驟,其結(jié)果對(duì)于后續(xù)跟蹤、定位解算的精度有很大的影響[1]。尤其是在復(fù)雜環(huán)境中,弱信號(hào)的捕獲技術(shù)一直是限制衛(wèi)星導(dǎo)航技術(shù)應(yīng)用的關(guān)鍵因素[2-4]。其中差分相干算法在全球定位系統(tǒng)(Global Positioning System,GPS)弱信號(hào)捕獲中已經(jīng)被廣泛應(yīng)用,然而對(duì)于調(diào)制NH碼的北斗B1中地球軌道/傾斜地球同步軌道(Medium Earth Orbit/Inclined Geosynchronous Orbit,MEO/IGSO)衛(wèi)星,直接使用差分捕獲算法不能達(dá)到捕獲弱信號(hào)的目的。經(jīng)過(guò)NH(Neumann-Hoffman)調(diào)制雖然提高了抗窄帶干擾能力、增強(qiáng)了衛(wèi)星信號(hào)的相關(guān)性,但也帶入了更多的比特跳變[5-7]。為了能夠充分利用差分捕獲算法的優(yōu)勢(shì),文獻(xiàn)[8]介紹了一種四分法與差分相干結(jié)合的改進(jìn)算法,這種算法對(duì)導(dǎo)航數(shù)據(jù)跳變進(jìn)行了估計(jì),提高了數(shù)據(jù)利用率,但這種算法只適合于北斗GEO;文獻(xiàn)[9]提出了的一種基于復(fù)數(shù)型差分相關(guān)的弱信號(hào)快速捕獲算法,削弱了NH碼相位變化的影響,但對(duì)比特跳變的影響沒(méi)做過(guò)多的處理;文獻(xiàn)[10]基于差分相干與短時(shí)匹配濾波器和快速傅里葉變換,并利用最小二乘擬合,可以得到更精確的捕獲多普勒頻率值,但算法復(fù)雜度也比較高,不利于硬件實(shí)現(xiàn)。
本文擬從減弱比特跳變的影響和加長(zhǎng)積分時(shí)間兩方面著手對(duì)差分算法進(jìn)行改進(jìn),分析二次調(diào)制對(duì)衛(wèi)星信號(hào)的影響,估計(jì)差分項(xiàng)的符號(hào),以期提高捕獲靈敏度。
1 捕獲原理
衛(wèi)星信號(hào)的捕獲即是對(duì)中頻數(shù)字信號(hào)進(jìn)行解調(diào)以及解擴(kuò)的過(guò)程。經(jīng)過(guò)二次調(diào)制的導(dǎo)航電文實(shí)現(xiàn)了二次擴(kuò)頻,因此通過(guò)二次解擴(kuò)才能有效地捕獲到衛(wèi)星信號(hào)。本文中把經(jīng)二次調(diào)制的測(cè)距碼認(rèn)定為一種新的碼(NH),只需實(shí)現(xiàn)NH碼的解擴(kuò)。判斷解調(diào)與解擴(kuò)之后的相關(guān)峰值,超過(guò)捕獲預(yù)設(shè)門(mén)限則捕獲成功。
常用的衛(wèi)星信號(hào)捕獲方法有串行捕獲和并行捕獲,本次實(shí)驗(yàn)使用基于FFT的并行碼相位捕獲算法。捕獲原理如圖1所示。
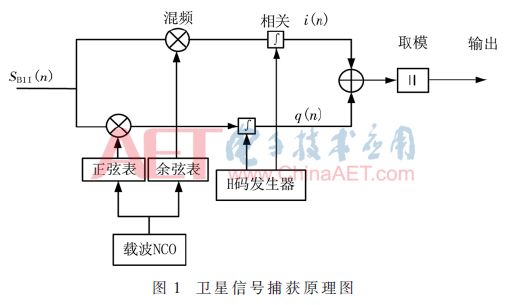
經(jīng)過(guò)數(shù)模轉(zhuǎn)換后的SB1I數(shù)字中頻輸入信號(hào)數(shù)學(xué)表達(dá)式為[11]:
式中,k為參與相干積分的離散點(diǎn)數(shù)。通過(guò)不斷調(diào)整多普勒頻率和延遲,當(dāng)τ=τL以及fd=fLd時(shí),S(τ,fd)的值最大。相干積分處理增益與相干時(shí)間呈正相關(guān),但導(dǎo)航數(shù)據(jù)的跳變使得相干積分不能無(wú)限制使用,因此一般使用非相干或差分相干的方式對(duì)相干積分結(jié)果進(jìn)行累加來(lái)提高信噪比。
非相干積分是對(duì)每次相干積分取模后平方的值進(jìn)行累加。數(shù)學(xué)原理如式(6)所示,由于進(jìn)行了平方操作,因此非相干積分可以消除導(dǎo)航數(shù)據(jù)跳變的影響,有效提高信號(hào)的信噪比。但信號(hào)平方的同時(shí)噪聲也進(jìn)行了平方,且經(jīng)過(guò)平方的噪聲不能通過(guò)累加抵消,這樣會(huì)帶來(lái)很大的平方損耗[12],因此針對(duì)弱信號(hào)捕獲一般使用差分相干技術(shù)。
2 改進(jìn)算法
2.1 新本地碼生成
常規(guī)的捕獲算法中是以C/A碼作為本地碼與衛(wèi)星信號(hào)進(jìn)行匹配,北斗衛(wèi)星C/A碼的長(zhǎng)度為1 ms,由于NH調(diào)制的存在,因此每次相干積分的時(shí)間只能為1 ms。若超過(guò)1 ms,NH碼相位的跳變會(huì)導(dǎo)致相干積分結(jié)果的衰減。
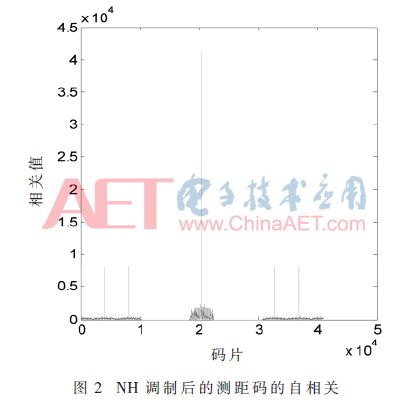
本文以NH二次調(diào)制的偽碼作為新的本地碼,稱為新本地碼。新本地碼的相關(guān)性如圖2所示,可以看出經(jīng)NH碼二次調(diào)制的測(cè)距碼也有良好的自相關(guān)特性,雖然在其他碼片處也會(huì)出現(xiàn)相關(guān)峰值,但與主峰相比較低,不影響捕獲結(jié)果。從圖中可以看出相鄰峰值的差值為
2 046的倍數(shù),所以在捕獲結(jié)果中會(huì)出現(xiàn)相對(duì)較低的其他峰值,這些峰值之間的距離為2 046的整數(shù)倍(若碼片精度為一個(gè)碼片)。經(jīng)過(guò)二次調(diào)制的測(cè)距碼與導(dǎo)航電文具有相同的周期,測(cè)距碼的起始跳變沿即為導(dǎo)航電文的跳變沿,因此完全解擴(kuò)后的相干積分時(shí)間段內(nèi)不存在導(dǎo)航電文的跳變,消除了由此帶來(lái)的相關(guān)功率損耗。新本地碼長(zhǎng)度為20 ms,因此可以與衛(wèi)星信號(hào)進(jìn)行長(zhǎng)達(dá)20 ms的相干積分,極大地提高了處理增益。
2.2 差分相干算法及改進(jìn)
將M×L ms的數(shù)據(jù)分為M等份,對(duì)每L ms數(shù)據(jù)與本地C/A碼相關(guān),結(jié)果為Ck′(τ,fd)(k′=1,2,3,…,M)。把前一時(shí)刻相干矩陣與后一時(shí)刻相干積分矩陣共軛的乘積進(jìn)行累加即為差分相干。其表達(dá)式為:
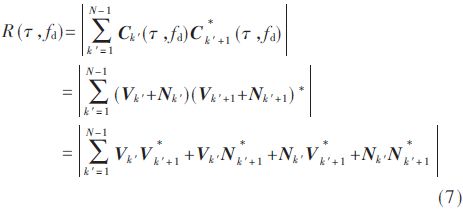
對(duì)差分相干結(jié)果進(jìn)行分析,第K′個(gè)相干積分矩陣Ck′可以表示為有用信號(hào)Vk′和噪聲Nk′之和,前一時(shí)刻相干積分結(jié)果Vk′與后一時(shí)刻的相干積分結(jié)果Vk′+1是相關(guān)的,而噪聲項(xiàng)中隨機(jī)噪聲與信號(hào)、噪聲與噪聲之間是不相關(guān)的,同時(shí)噪聲項(xiàng)也具備零均值高斯噪聲的特點(diǎn),可以通過(guò)累加抵消。因此差分相干既可以達(dá)到增強(qiáng)信噪比的目的,又可降低平方損耗。相較于非相干積分,相干積分可以提高處理增益。
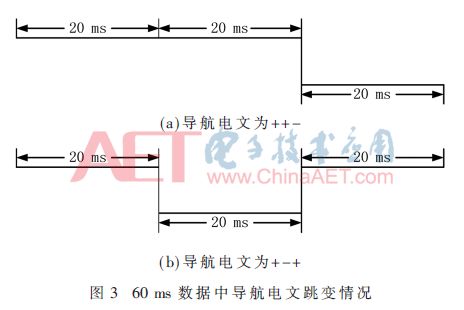
北斗非同步衛(wèi)星NH碼和導(dǎo)航電文的周期相同,NH碼的起點(diǎn)即導(dǎo)航電文的跳變沿,因此以20 ms進(jìn)行相干積分時(shí)不需要考慮積分時(shí)間段內(nèi)導(dǎo)航電文的跳變。導(dǎo)航電文只有1和-1兩種情況,取60 ms數(shù)據(jù),H碼已經(jīng)對(duì)齊,對(duì)于圖3(a)所示只有一次導(dǎo)航電文跳變的情況,倆次差分結(jié)果的累加和為0,存在數(shù)據(jù)的正負(fù)抵消;對(duì)于圖3(b)所示的有2次導(dǎo)航跳變的情況,2次差分結(jié)果的累加和為-2,沒(méi)有數(shù)據(jù)的抵消。以隨機(jī)事件進(jìn)行分析,在3 bit導(dǎo)航電文中只出現(xiàn)一次導(dǎo)航電文跳變的概率為1/4。這對(duì)于系統(tǒng)增益會(huì)有很大的損失。
針對(duì)這種情況,本文對(duì)每20 ms所對(duì)應(yīng)的導(dǎo)航電文進(jìn)行極性估計(jì),導(dǎo)航電文極性的改變不會(huì)影響輸入信號(hào)和本地信號(hào)的載波和碼相位,因此可以通過(guò)改變差分項(xiàng)的符號(hào)來(lái)消除導(dǎo)航跳變引起的系統(tǒng)處理增益的損失。對(duì)于導(dǎo)航電文為1,-1,-1,1 ,1,-1,-1,1的160 ms數(shù)據(jù)進(jìn)行差分,其結(jié)果為-1,1,-1,1,-1,1,-1。對(duì)差分結(jié)果的符號(hào)進(jìn)行判斷,假定第一個(gè)差分結(jié)果的符號(hào)為+,則差分項(xiàng)符號(hào)只有在+ - + - + - +的情況下累加結(jié)果最大。每個(gè)差分項(xiàng)都有兩種可能的符號(hào),因此20×(M+1) ms數(shù)據(jù)的差分項(xiàng)符號(hào)會(huì)有2M種組合。遍歷2M種組合,找出相關(guān)值的最大值,此值所對(duì)應(yīng)的差分項(xiàng)符號(hào)的組合即為最佳路徑。最佳路徑估計(jì)的實(shí)質(zhì)是要找出使每次累加的值都在增大且其最終累加結(jié)果最大的符號(hào)組合。因此可以不必遍歷2M種組合,快速找出最佳路徑。
本文中所用的是并行碼相位捕獲算法,其所有碼相位的搜索是通過(guò)兩次FFT和一次IFFT同時(shí)完成的。因此一個(gè)頻率槽對(duì)應(yīng)一個(gè)路徑。設(shè)差分矩陣為D,本地多普勒頻率為f,差分項(xiàng)符號(hào)為A1,A2,A3,…,AM。令A(yù)1=1,E1=D1。詳細(xì)過(guò)程描述如下:
(1)令S1=D1+D2,S2=D1-D2。若|S1|>|S2|,則A2=1,E1=S1,否則A2=-1,E1=S2;
(2)令S1=E1+D3,S2=E1-D3。若|S1|>|S2|,則A3=1,E1=S1,否則A3=-1,E1=S2。
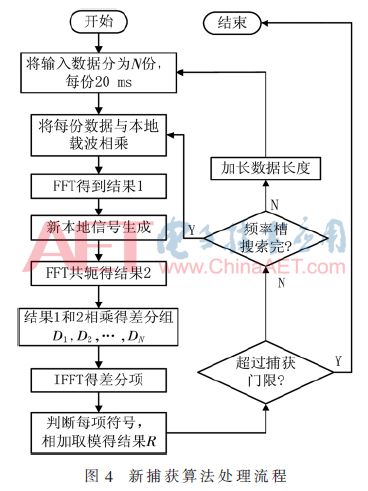
重復(fù)執(zhí)行以上步驟,直到求出AM的符號(hào)。從所有頻率所對(duì)應(yīng)的路徑中,選出使E1最大的路徑。比特估計(jì)算法同樣適用于GEO衛(wèi)星,需要注意弱信號(hào)對(duì)于頻率偏移較敏感,因此用這種算法捕獲弱信號(hào)時(shí),必須加長(zhǎng)相干積分的時(shí)間,否則可能增加誤捕率。新捕獲算法的算法流程如圖4所示。
3 實(shí)驗(yàn)與分析
利用MATLAB對(duì)該算法進(jìn)行仿真,實(shí)驗(yàn)中選用矩陣電子的多星座導(dǎo)航信號(hào)模擬器(型號(hào)為GNS-8332)產(chǎn)生衛(wèi)星信號(hào)。可以通過(guò)配置通道參數(shù)生成不同功率的北斗B1射頻信號(hào),其最低可以產(chǎn)生-189 dBm的弱信號(hào)。采用萊特信息科技的多天線衛(wèi)星中頻信號(hào)采樣器(型號(hào)為L(zhǎng)T-
C-002)進(jìn)行衛(wèi)星數(shù)據(jù)采集,采樣頻率為20 MHz。中心頻率為2.902 MHz,多普勒頻率為-3 000~3 000 Hz。
模擬器產(chǎn)生北斗6號(hào)星的信號(hào),其功率為-140 dBm,相干積分時(shí)間為20 ms,差分相干次數(shù)為10。如圖5常規(guī)差分相干的捕獲結(jié)果所示,多普勒頻率和碼相位分別為-1 500 Hz和31 563,最大相關(guān)峰值為3.02×1010。圖6為經(jīng)過(guò)比特最佳估計(jì)的差分相干捕獲結(jié)果。其最佳比特為1 1 1 1 1 -1 1 1 -1 -1,多普勒頻率與碼相位與圖5中相同,最大峰值為5.3×1010。從圖中可以看出,改進(jìn)后的算法比常規(guī)差分相關(guān)峰值有明顯的增高。從兩張圖中都可以看出除主峰之外的其他峰值,這與二次調(diào)制的測(cè)距碼相關(guān)性有關(guān),同時(shí)在頻率軸上主峰倆側(cè)會(huì)出現(xiàn)次峰,這是由于NH碼未完全對(duì)齊,導(dǎo)致積分時(shí)間段內(nèi)有導(dǎo)航數(shù)據(jù)跳變所引起,不影響捕獲結(jié)果。
通過(guò)模擬器以1 dBm不斷衰減信號(hào)功率,測(cè)試算法捕獲極限,對(duì)功率降低至-142 dBm的北斗非同步衛(wèi)星信號(hào)進(jìn)行實(shí)驗(yàn),積分方式與實(shí)驗(yàn)一相同,比較兩種算法的結(jié)果。此時(shí)傳統(tǒng)差分相干捕獲算法已經(jīng)不能捕獲到信號(hào),而改進(jìn)的差分相干算法在-142 dBm時(shí)仍有明顯的峰值。繼續(xù)衰減信號(hào)功率,當(dāng)信號(hào)功率低于-145 dBm時(shí),改進(jìn)的差分算法不再有明顯相關(guān)。利用兩種方法對(duì)多組數(shù)據(jù)進(jìn)行捕獲,其結(jié)果表明改進(jìn)的算法能比常規(guī)差分捕獲算法提高2 dB~3 dB的增益。
4 結(jié)語(yǔ)
本文對(duì)適用于GPS的弱信號(hào)捕獲方法進(jìn)行了改進(jìn),提出一種適用于北斗MEO/IGSO衛(wèi)星的弱信號(hào)捕獲算法。該算法利用經(jīng)NH調(diào)制的測(cè)距碼的良好自相關(guān)性,進(jìn)行20 ms的長(zhǎng)數(shù)據(jù)相干,并對(duì)差分算法進(jìn)行最佳比特估計(jì)。由于計(jì)算機(jī)內(nèi)存的限制,本實(shí)驗(yàn)最多可以處理220 ms的數(shù)據(jù),能夠?qū)崿F(xiàn)-145 dBm的弱信號(hào)捕獲。若加長(zhǎng)數(shù)據(jù)長(zhǎng)度,可以實(shí)現(xiàn)更弱信號(hào)的捕獲。
-
算法
+關(guān)注
關(guān)注
23文章
4708瀏覽量
95294 -
衛(wèi)星
+關(guān)注
關(guān)注
18文章
1763瀏覽量
68421 -
北斗
+關(guān)注
關(guān)注
3文章
676瀏覽量
36792
原文標(biāo)題:【學(xué)術(shù)論文】北斗B1 MEO/IGSO衛(wèi)星信號(hào)的差分捕獲算法
文章出處:【微信號(hào):ChinaAET,微信公眾號(hào):電子技術(shù)應(yīng)用ChinaAET】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
一種適用于無(wú)線通信系統(tǒng)的半盲ICA算法
SKYLAB細(xì)聊“北斗+GPS”多模衛(wèi)星定位模塊
GPS北斗衛(wèi)星+慣性組合導(dǎo)航模塊的優(yōu)勢(shì)分析
一種適用于模擬/數(shù)字混合信號(hào)環(huán)境的接地技術(shù)
一種適用于室內(nèi)復(fù)雜環(huán)境的高精度、環(huán)境自適應(yīng)性強(qiáng)的定位算法
一種適用于空間觀測(cè)任務(wù)的實(shí)時(shí)多目標(biāo)識(shí)別算法分享
一種適用于可視電話的快速運(yùn)動(dòng)估計(jì)算法
GLONASS衛(wèi)星信號(hào)的捕獲及其仿真

北斗全球系統(tǒng)明年將全面建成
一種適用于軟件無(wú)線電的數(shù)字調(diào)制與解調(diào)算法的詳細(xì)說(shuō)明

導(dǎo)航不是GPS嗎,有人用北斗嗎?

一種適用于FPGA實(shí)現(xiàn)的盲均衡算法
基于相控陣天線的衛(wèi)星信號(hào)波束跟蹤算法
一種適用于動(dòng)態(tài)場(chǎng)景的多層次地圖構(gòu)建算法
雙北斗時(shí)鐘服務(wù)器、雙北斗校時(shí)服務(wù)器、雙北斗NTP授時(shí)服務(wù)器






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論