") FANUC機器人宏程序自動運行的方法及啟動宏程序的步驟教程
FANUC機器人宏程序自動運行的方法及啟動宏程序的步驟教程
在程序調(diào)試完成后,投入到生產(chǎn)中,我們可以使用幾種方法實現(xiàn)程序自動運行,且不需要按住使能鍵??
第一 使用宏程序;
第二 使用RSR程序;
第三 使用PNS程序;
等等
那么現(xiàn)在小編帶你一起學(xué)習(xí)宏程序的相關(guān)知識!!!
一、步驟:
1、打開程序一覽界面,如下圖所示;

2、按下F2創(chuàng)建,進入程序創(chuàng)建界面,如下圖所示;

3、移動光標選擇合適的命名方式,對應(yīng)按下功能鍵F1~F5,輸入與對應(yīng)的符號,按下 [ENTER] 回車鍵,如下圖所示;
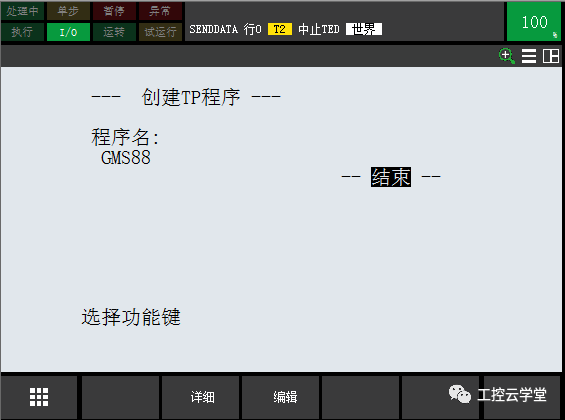
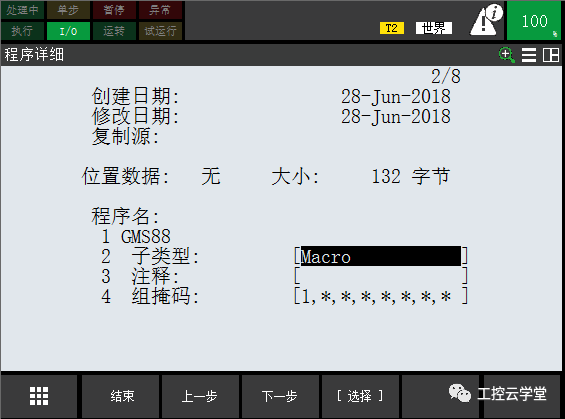
4、再按下F2 詳;細,把子類型 選擇為 Macro (宏程序),如下圖所示;
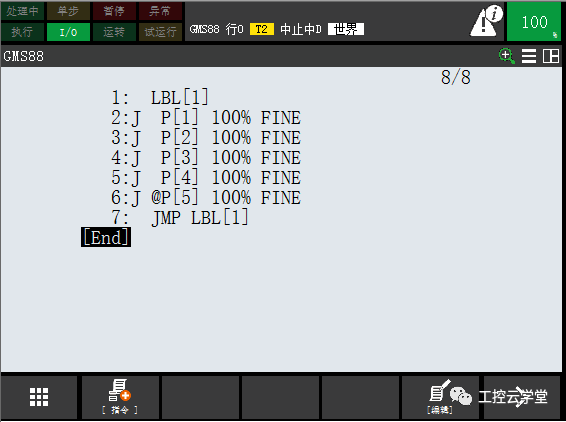
5、按下F1結(jié)束 ,該程序就創(chuàng)建完成,并且編寫好程序,如下圖所示;
二、啟動宏程序
1按下 MENUS(菜單)鍵 →設(shè)置 → 類型→ 宏,進入宏設(shè)定界面,如下圖所示;

2光標移到 指令名稱,按下 ENTER 鍵,輸入名稱,如下圖所示;

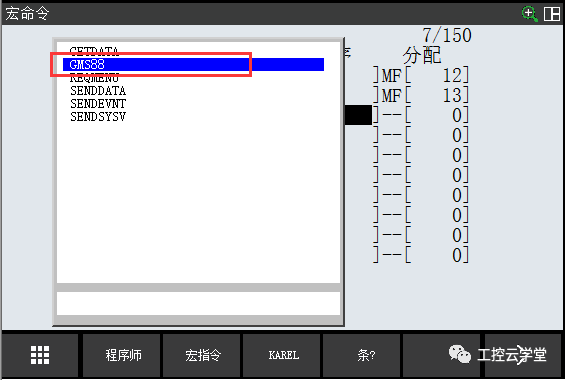
3光標移到程序,按下F4 選擇,點擊宏指令,如下圖所示;
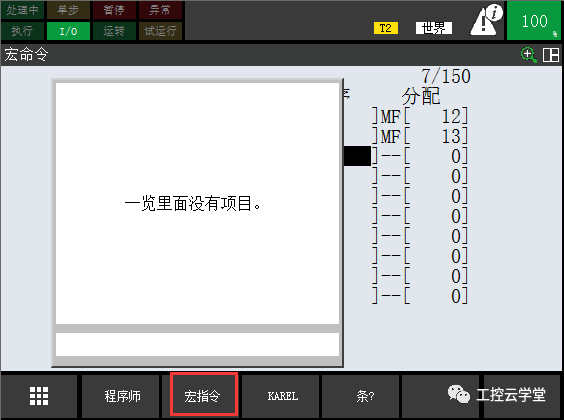
4選擇我們剛剛所創(chuàng)建的宏程序,如下圖所示;
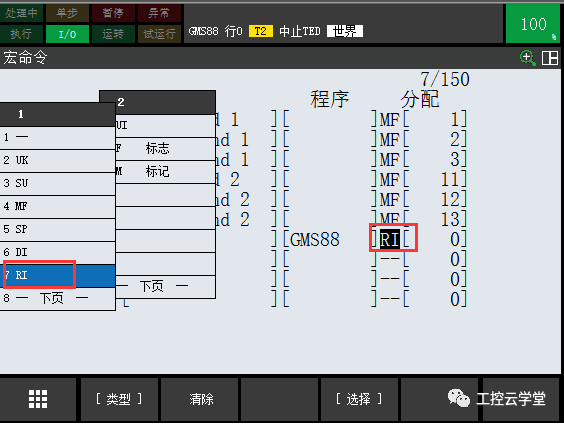
5光標移到分配,按下F4 選擇,選擇執(zhí)行方式(如 RI )如下圖所示;
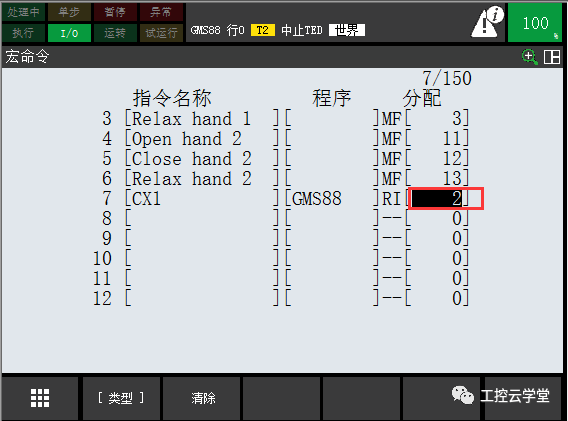
6通過移動光標,右移到 [ 0 ] 處輸入對應(yīng)RI號碼,如下圖所示;
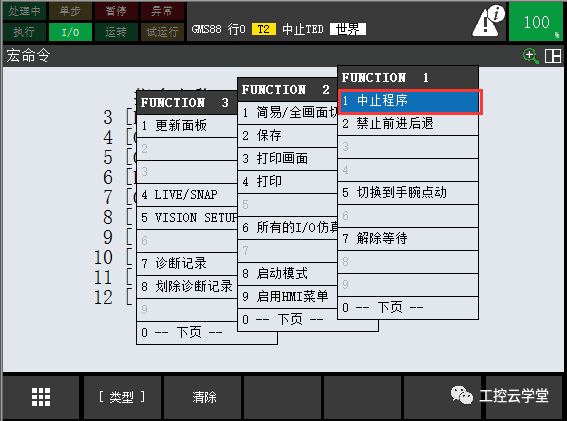
7按下FCTN 輔助菜單鍵,選擇中止程序,如下圖所示;
8示教器開關(guān)模式打至OFF,如下圖所示;
9控制柜模式開關(guān)打至AUTO檔,如下圖所示;
10示教器處于非單步執(zhí)行狀態(tài),如下圖所示;

11將對應(yīng)的RI [2]接通,如下圖所示,此時機器人就會運行所設(shè)定的宏程序;
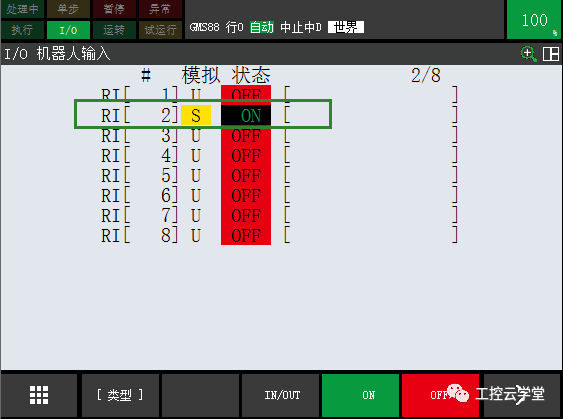
這樣就可以現(xiàn)實無限循環(huán)動作了,并且不需要我們按住使能開關(guān)。
-
機器人
+關(guān)注
關(guān)注
213文章
29577瀏覽量
212022 -
Fanuc
+關(guān)注
關(guān)注
19文章
121瀏覽量
37375 -
宏程序
+關(guān)注
關(guān)注
0文章
4瀏覽量
6404
原文標題:FANUC 機器人宏程序相關(guān)知識
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學(xué)堂】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
FANUC 工業(yè)機器人編程與聯(lián)網(wǎng)相關(guān)資料推薦
數(shù)控宏程序教程
G代碼編程及宏程序應(yīng)用
FANUC程序計時指令的使用你知道多少?
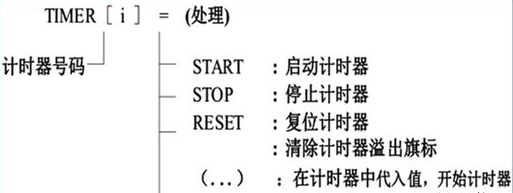
如何使用FANUC程序計時指令詳細概述

輕松掌握FANUC機器人編程 維護與外圍集成
宏程序提供了替代其他雷尼紹觸發(fā)式循環(huán)的有力方案
FANUC機器人建立part carrier和跟蹤參數(shù)的方法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論