 使用LabVIEW軟件和DSP實現液壓伺服控制系統設計與提高實時控制性
使用LabVIEW軟件和DSP實現液壓伺服控制系統設計與提高實時控制性
1 引言
隨著試驗機技術的進步,近年來國內外電子液壓萬能試驗機發展了3種不同控制方式:電液伺服閥控制、采用具有速度控制器的壓力閥控制和寬流量范圍的比例閥控制。電液倒服控制技術作為現代微電予技術、計算機技術和液壓技術的橋梁,已經成為現代控制技術的重要組成部分。采用電液伺服閥控制的電子液壓萬能試驗機除了控制技術外,還采用高精度力與位移傳感器的測量系統及計算機采集處理等技術,在功能上達到甚至超過了電子萬能試驗機,尤其是在大負荷液壓萬能試驗機上具有更大的優勢。因此,廣泛應用于汽車構架的靜載、動載和疲勞等材料的各種性能試驗中。
本文在電液伺服控制技術的基礎上,對基于LabVIEW和TMS320F2812的液壓伺服控制系統進行了深入的研究,本系統利用圖形化編程工具LabVIEW軟件編寫的上位機人機界面具有易于操作,便于維護等特點。系統采用數字信號處理器DSP中的TMS320F2812作為核心處理器的實時控制器,該控制器外擴了數據存儲器和12位數模轉換電路,達到了系統的精度要求。
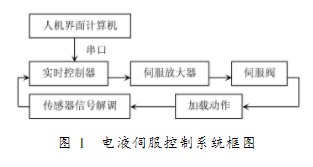
2 液壓伺服控制系統的組成
本文設計的電液伺服系統分為以高速數字處理器DSP為核心的集信號調理、數據采集、控制、轉換等于一身的實時控制器和利用圖形化編程工具LabVIEW軟件編寫的人機界面兩大部分。該系統利用串行通信口將試驗機的操作者通過人機界而發出的各種控制命令發送到實時控制器,實時控制器按命令完成一系列操作并將液壓伺服系統的工作狀態通過串行通信口送到PC機,并在PC機上的人機界面上顯示。
3 上位機人機界面軟件設計
3.1 LabVIEW簡介
上位機人機界面軟件采用LabVIEW,他是實驗室虛擬儀器集成環境(Laborator Virtual Instrument Engineering Workbenth)的簡稱,LabVIEW采用G語言為其編程語言。G語言是一種適合應用于任何編程任務,具有擴展函數庫的通用編程語言。和C語言等語言一樣,G語言定義了數據模型、結構類型和模塊調用語法規則等編程語言的基本要素,在功能完整性和應用靈活性上不遜色于任何高級語言。G語言與傳統高級編程語言最大的差別在于編程方式,一般高級語言采用文本編程,而G語言采用圖形化編程方式。
3.2 上位機人機界面功能介紹
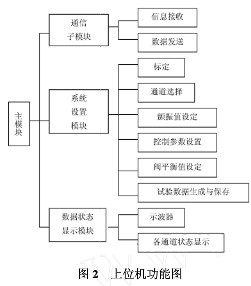
3.2.1 通信子模塊
通信子模塊包括信息的接收和數據的發送兩部分。信息接收功能是指上位機通過串口接收由下位機反饋回來的命令信號、狀態信號和反饋信號,供上位機顯示和保存用。數據發送功能則是上位機通過串口以一定的協議發送幀信息,這些信息將包括所有對下位機的控制命令。
3.2.2 系統設置模塊
系統設置模塊簡單介紹標定與控制參數設定這兩部分。
標定部分主要是根據載荷傳感器,位移傳感器等不同傳感器之間性能參數的不同而進行的零點、增益、量程的標定,從而為不同的控制方式提供參數標準。
控制參數設定包括控制方式的選擇,試驗類型,限制值等參數的設置。
控制方式分為3種:位移控制、行程控制和載荷控制。這3種不同的控制方式所連接的現場設備都要經過由靜態向動態的工作過程,所以必須在靜態時設置其靜態初始值,同時規定其上下限值,超出這一范圍系統都要強行停機。實驗類型分為常規,擬動力,疲勞,隨機波等。
液壓伺服控制系統的正常工作是在各種不同模擬信號波形的驅動下實現的,這就要求上位機設置這些波形的動態實驗參數,以供下位機軟件產生這些波形。以正弦波為例,正弦波的幅值,頻率以及重復次數,位于第幾譜塊等參數都要通過幀協議發送給下位機。
上位機也要將PID控制的P,I,D參數發送給下位機,由于這些參數都是浮點型,而DSP2812只能處理定點數據,所以上位機需要在發送數據前將浮點數轉化為定點數,以便下位機識別。
3.2.3 狀態顯示模塊
示波器部分主要顯示通道命令、通道載荷和通道位移等曲線。
數據生成與保存是將試驗的一些參數包括通道分配、控制方式、系統標定的數據、載荷譜等數據保存在不同的文件中。
4 實時控制器的設計
4.1 實時控制器硬件設計
該系統的實時控制器結構框圖如圖4所示,主要包括模擬信號輸入接口電路、信號調理電路、時鐘與復位電路、電源轉換電路、外部存儲器擴展電路、數據通信接口電路、功率放大等部分。
本文采用DSP2812自帶外設ADC完成對信號的采集,同時外擴了一片64 kB RAM芯片ISLV6416存儲臨時數據,一片DAC7625芯片用以實現數字信號向模擬信號的轉換,轉換的模擬信號經功率放大后輸出。

4.1.1 外部數據存儲器
外部數據存儲器采用ISSI公司的ISLV6416芯片,ISLV6416是一片64 k×16 b的高速靜態RAM,采用3.3 V電源供電,3.3 V電壓信號由電源轉換芯片TPS767D381PWP轉換實現,他可將+5 V電壓轉換成+3.3 V和+1.8 V,這兩個電壓同時可供DSP工作。ISLV6416的控制信號OE(讀數據),WE(寫數據)直接與DSP的XWE和XRD兩引腳相連,數據和地址線也直接與DSP相連。CE(片選)信號由地址線A16和外部空間選擇信號XZCS2相“或”產生,因此RAM的地址為0x00080000~0x0008FFFF。
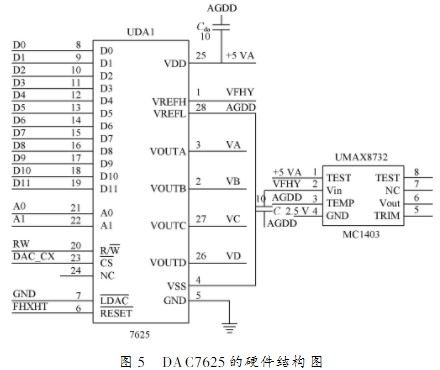
4.1.2 D/A轉換電路
由于伺服閥的輸入量是模擬信號,而控制器處理后的輸出數據是數字量,因此,需要把數字量轉換為模擬量后輸出到伺服閥上。
在設計過程中,選擇了12位模數轉換芯片DAC7625,他是BURR-BROWN公司生產的一種低功耗12位并口輸出的模數轉換芯片,他的setting time 只有10 μs,支持單極和雙極輸出。12位數據可由TMS320F2812一次送出。根據電源供電方式的不同,4通道模擬輸出量電壓的范圍將由兩參考電壓端參考電壓決定。如單電源+5 v供電,參考電壓端VREFH輸入+2.5 V,VREFL接地,則模擬輸出量電壓范圍為0~2.5 V。若采用雙電源±5 v供電,參考電壓端VREFH輸入+2.5 V,VREFL輸入-2.5 V,則模擬輸出量電壓范圍為-2.5~+2.5 V。參考電壓可由芯片MAX1403產生。DAC7625選擇哪路模擬量輸出由兩個片選信號A0,A1決定。讀寫信號RW與DSP的XR/W腳相連,片選DAC_CS由地址線A16反相后與外部空間選擇信號XZCS2相“或”產生,所以DAC7625的地址范圍為:0x00090000~0x0009FFFF。
4.1.3 串口通信
整個DSP作為下位機的核心CPU,是通過串口實現與上位機的通信的,TMS320F2812有兩個片內外設SCIA/SCIB實現串口通信功能。硬件電路采用符合RS232標準的驅動芯片MAX232進行串口通信。MAX232芯片功耗低,集成度高,+5 V供電,具有兩個接收和發送通道。
4.2 控制器的軟件設計
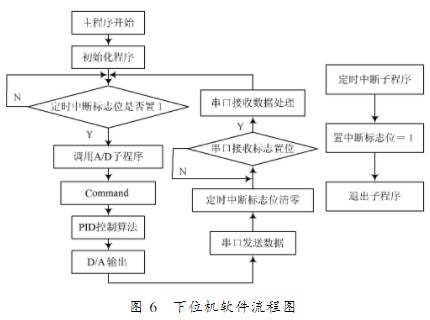
初始化程序包括各種參數和變量的初始化,啟動定時器,由于此液壓伺服系統的控制信號為50 Hz以下,所以將定時時間確定為1 ms,完全滿足系統要求。1 ms定時后,檢測定時中斷標志位是否置1,置位信號由中斷服務子程序完成,若已經被置1則啟動A/D轉換采集,A/D轉換主要負責數據采集、轉換、工程變換等工作,并根據相應的控制模式,將相應傳感器的信號作為控制器的反饋信號,若未置位則返回等待。調用Command函數,在Command函數中,程序根據相應的控制狀態和控制參數計算當前時刻的命令信號,該命令信號由兩部分組成,一部分為靜態命令,另一部分為動態命令,實際控制信號為兩部分之和,該信號為前饋PID控制的輸入信號。前饋PID控制函數則根據命令信號、反饋信號和相關參數(如PID參數)計算輸出控制指令。D/A轉換函數主要是通過D/A板將計算機的控制指制信號為兩部分之和,該信號為前饋PID控制的輸入信號。前饋PID控制函數則根據命令信號、反饋信號和相關參數(如PID參數)計算輸出控制指令。D/A轉換函數主要是通過D/A板將汁算機的控制指令轉換成為相應的模擬量(該模擬信號通過伺服放大板進行放大后驅動伺服驅動部分),串口發送程序子函數將控制器當前時刻的所有信號(包括命令信號、狀態信號和反饋信號)的數據傳送給上位機,供上位機顯示和保存用。之后將標志位清零并判斷串口接收標志位是否為1,是則對已經接收到的完整數據包處理,否則返回上一步。
5 結語
本文上位機采用高級圖形化編程工具LabVIEW編寫人機交互界面,美觀、易于操作,下位機采用TI公司的TMS320F2812為系統核心CPU,提高了系統運行的速度、精度及穩定性,外擴存儲器增強了數據處理能力,并行12b DAC既滿足了控制精度的要求,也提高了整個系統的實時控制性。下位機軟件在定時周期1 ms內完成A/D的轉換,Command命令計算,前饋PID控制算法,D/A輸出,串口通信等功能。整個系統工作穩定,在實驗中效果很好。
-
dsp
+關注
關注
556文章
8151瀏覽量
355884 -
控制器
+關注
關注
114文章
17026瀏覽量
183321 -
控制系統
+關注
關注
41文章
6768瀏覽量
111890
發布評論請先 登錄







 工商網監
工商網監
評論