") 純硬件電路控制的多功能智能小車的設(shè)計(jì)
純硬件電路控制的多功能智能小車的設(shè)計(jì)

引 言
當(dāng)前的電動(dòng)小車基本上采取的是基于純硬件電路的一種開環(huán)控制方法, 這種電動(dòng)小車雖然也具有直線行駛、前進(jìn)、后退、轉(zhuǎn)彎、停車等基本功能,但在某些特殊場(chǎng)合,電動(dòng)小車卻無法采集到自動(dòng)化控制領(lǐng)域的有用信息。在這種情況下,就需要開發(fā)用于自動(dòng)化控制領(lǐng)域的智能小車。為此,本文以ATmega16 單片機(jī)為控制核心,用RF2401 無線收發(fā)模塊進(jìn)行遙控通信,同時(shí)用DS18B20 進(jìn)行溫度檢測(cè),并采用超聲波等傳感器材來檢測(cè)信號(hào)和障礙物,最后利用單片機(jī)的串口資源和運(yùn)算、處理能力,開發(fā)設(shè)計(jì)了一種智能控制系統(tǒng),從而實(shí)現(xiàn)了小車的測(cè)溫、躲避障礙物等功能。
1 總體方案及器件的選取
1.1 總體方案
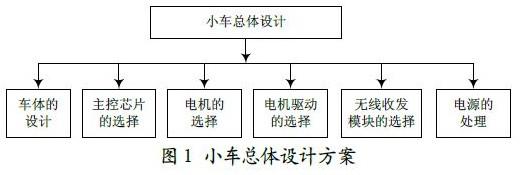
本系統(tǒng)以單片機(jī)為核心,增添其他外圍設(shè)備,如雙電源模塊、超聲波探測(cè)器、顯示模塊、無線收發(fā)模塊等,以兩個(gè)直流電機(jī)經(jīng)過減速箱作為驅(qū)動(dòng),通過主控單元來處理傳感器上信號(hào),處理數(shù)據(jù)后完成相應(yīng)的操作,以實(shí)現(xiàn)相應(yīng)的功能。
小車總體設(shè)計(jì)方案如圖1 所示。
1.2 器件的選取
本設(shè)計(jì)的車體設(shè)計(jì)由筆者制作。主控芯片采用Atmel 公司推出的高性能、高速度、低功耗的ATmega16 AVR 單片機(jī)作為電動(dòng)車的主控制芯片;電機(jī)選擇使用控制方法較為簡(jiǎn)單的直流減速電機(jī)作為電動(dòng)車的驅(qū)動(dòng)電機(jī);電機(jī)驅(qū)動(dòng)選擇可直接對(duì)電機(jī)進(jìn)行控制,而無須隔離電路的L298N 作為電機(jī)驅(qū)動(dòng)芯片。
2 硬件實(shí)現(xiàn)
2.1 ATmega16 單片機(jī)
AVR 單片機(jī)是Atmel 公司推出的較為新穎的單片機(jī),其顯著的特點(diǎn)為高性能、高速度、低功耗。
而ATmega 系列是AVR 單片機(jī)中的高端產(chǎn)品。單周期可執(zhí)行本指令功能,同時(shí)完成下一條指令的讀取。通常時(shí)鐘頻率用6~16 MHz,故最短指令執(zhí)行時(shí)間為250~125 ns.還有I/O 第二功能,內(nèi)部有時(shí)鐘電路、10 Bit AD 功能,片內(nèi)資源很豐富。
2.2 ATmega16 最小系統(tǒng)圖ATmega16 單片機(jī)的最小系統(tǒng)如圖2 所示。
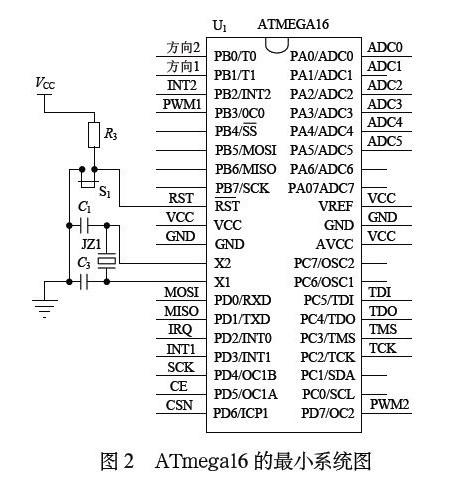
最小系統(tǒng)主要包括晶振電路、電源電路、復(fù)位電路等。
2.3 電機(jī)驅(qū)動(dòng)部分
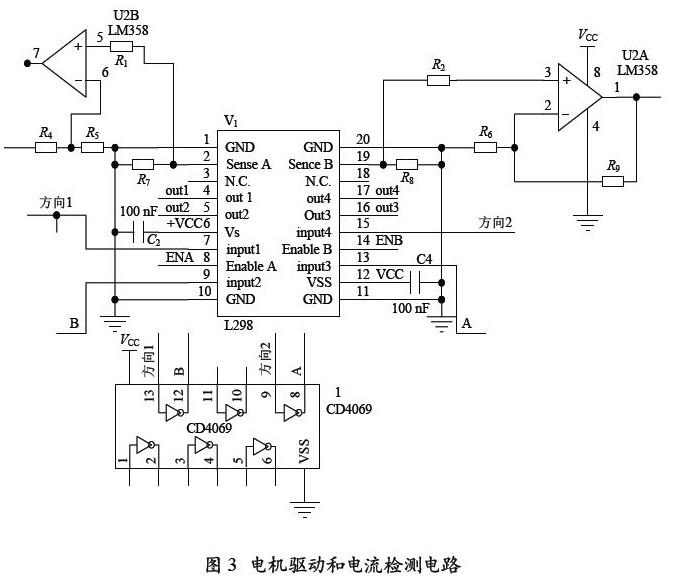
該模塊主要由L298 芯片來控制兩個(gè)電機(jī)的正反轉(zhuǎn),以及改變電機(jī)的轉(zhuǎn)速。L298 芯片是一種高壓、大電流雙全橋式驅(qū)動(dòng)器。其中,SENSEA、SENSEB 分別為兩個(gè)H 橋的電流反饋腳,不用時(shí)可以直接接地。
VCC、VS 接電源引腳,電壓范圍分別是4.5~7 V、2.5~46 V,設(shè)計(jì)中VCC 端與單片機(jī)電源端共用5 V 工作電源,VS 端獨(dú)立地接9 V 電源。ENA、ENB 為使能端,低電平禁止輸出。IN1、IN2、IN3、IN4 為數(shù)據(jù)輸入引腳,OUT1、OUT2、OUT3、OUT4 為數(shù)據(jù)輸出引腳。根據(jù)L298N 的引腳和輸出引腳的邏輯關(guān)系,將IN1、IN2 經(jīng)過非門連接,IN3、IN4 經(jīng)過非門連接,即IN1 和IN2 永遠(yuǎn)是相反的,一高一低,IN3、IN4 也一樣,通過改變ENA、ENB 就能分別改變左右輪的速度。
在SENSEA、SENSEB 端輸出采集電壓信號(hào), 再經(jīng)過LM358 運(yùn)放放大,送給ADC 處理,即可得到電機(jī)的工作電流,具有過流保護(hù)功能。圖3 所示為系統(tǒng)電機(jī)驅(qū)動(dòng)電路和電流檢測(cè)電路。
2.4 穩(wěn)壓電源部分和外接傳感器部分
設(shè)計(jì)時(shí),可采用7805 穩(wěn)壓芯片為電路提供穩(wěn)定的5 V 電壓,1117 芯片為電路提供3.3 V 電壓。由于本系統(tǒng)的電源電路比較簡(jiǎn)單,而且應(yīng)用也比較廣泛,所以本文就不詳細(xì)介紹了。
系統(tǒng)中的傳感器包括溫度傳感器DS18B20、霍爾元件速度傳感器等,其電路都比較簡(jiǎn)單。因此,只需在電路板上預(yù)留3 線接口,即電源、接地、數(shù)據(jù)。
2.5 顯示部分
本系統(tǒng)使用LCD12864 作為電路顯示元件,LCD12864有20 個(gè)引腳,圖4 所示是LCD12864 的驅(qū)動(dòng)電路圖。
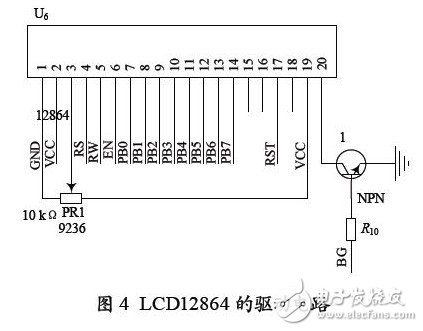
本設(shè)計(jì)采用8 位數(shù)據(jù)線并行口方式驅(qū)動(dòng),三根控制線為RS( 命令/ 數(shù)據(jù)選擇)、R/W( 讀/ 寫控制)、EN( 使能端),背光通過三極管驅(qū)動(dòng),采用PWM 來控制背光亮度。
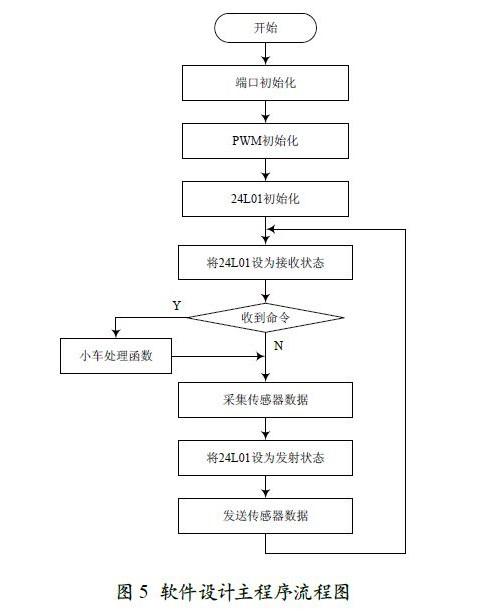
3 小車程序設(shè)計(jì)
小車程序設(shè)計(jì)時(shí),首先進(jìn)行端口初始化,然后進(jìn)行PWM初始化,再NRF24L01 初始化,將NRF24L01 設(shè)為接收狀態(tài)。
收到命令,則執(zhí)行小車的相應(yīng)函數(shù),否則,采集傳感器數(shù)據(jù)。
然后設(shè)置NRF24L01 為發(fā)射狀態(tài),以發(fā)送數(shù)據(jù)。發(fā)送完畢,再將NRF24L01 設(shè)置為接收狀態(tài)。圖5 所示是其系統(tǒng)主程序流程圖。
4 結(jié) 語
目前,市面上尋跡的、避障的,多傳感器數(shù)據(jù)融合等基于單片機(jī)編程的智能小車已經(jīng)發(fā)展開了,用于玩具、大學(xué)生實(shí)踐比賽、工業(yè)數(shù)據(jù)檢測(cè),以及用于生活的智能電動(dòng)小汽車也已有了一定發(fā)展,在充滿環(huán)保、節(jié)能、科技的未來社會(huì),智能小車的應(yīng)用將無處不在。
本課題主要研究了多功能智能小車的技術(shù),多功能智能小車的研制課題涉及到機(jī)械電子、傳感器技術(shù)、驅(qū)動(dòng)控制技術(shù)、人工智能等多個(gè)領(lǐng)域的研究及技術(shù)融合。本課題研制的演示系統(tǒng)高度的智能化、人性化,并且具備良好的安全性和環(huán)保性。
-
傳感器
+關(guān)注
關(guān)注
2564文章
52805瀏覽量
765568 -
單片機(jī)
+關(guān)注
關(guān)注
6067文章
44962瀏覽量
648978 -
電源模塊
+關(guān)注
關(guān)注
33文章
1896瀏覽量
94332
發(fā)布評(píng)論請(qǐng)先 登錄
布谷鳥科技AI多功能中央控制器產(chǎn)品介紹
基于STM32藍(lán)牙控制小車系統(tǒng)設(shè)計(jì)(硬件+源代碼+論文)下載
每周推薦!基于STM32開發(fā)項(xiàng)目實(shí)例下載(含PCB、原理圖、源碼等)
基于STM32藍(lán)牙控制小車系統(tǒng)設(shè)計(jì)(硬件+源代碼+論文) 項(xiàng)目實(shí)例下載
基于STM32的多功能數(shù)控電源設(shè)計(jì)(原理圖、PCB、程序源碼等)
【硬核項(xiàng)目】STM32F103 智能小車全棧開發(fā):紅外循跡 / 避障算法 + WiFi 遠(yuǎn)程控制,附原理圖與代碼
【零基礎(chǔ)逆襲軟硬件工程師】華清遠(yuǎn)見STM32F103智能小車開發(fā)實(shí)戰(zhàn),手把手帶你從硬件組裝到WiFi遠(yuǎn)程控制,解鎖

全國大學(xué)生電子設(shè)計(jì)大賽加畢業(yè)設(shè)計(jì)項(xiàng)目合集
Simcenter SCADAS Recorder多功能數(shù)據(jù)采集系統(tǒng)

多功能焊接能量監(jiān)測(cè)儀:精準(zhǔn)控制,高效作業(yè)
如何選擇讓自己滿意(適合)的agv小車?純干貨分享
受電端Type-C設(shè)計(jì),PD協(xié)議的純硬件實(shí)現(xiàn)詳解
自適應(yīng)藍(lán)牙控制智能小車
第13章-循跡功能 STM32智能小車循跡教程 PID循跡算法分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論