") 深度探析V2X與ITS的發(fā)展史
深度探析V2X與ITS的發(fā)展史

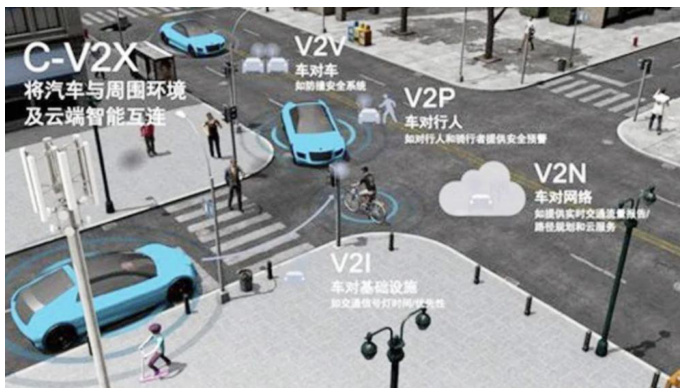
V2X可以簡單分為兩大類,一類是以智能交通(ITS)為核心的,發(fā)起者自然是政府機構(gòu)。另一類是以智能駕駛為核心的,發(fā)起者主要是汽車廠家和電信運營商。另一種分法就是按通訊方式,一類是DSRC,一類是C-V2X。DSRC主要是針對智能交通應(yīng)用的,歐美日都選擇以DSRC的智能交通技術(shù)路線,某種意義上講DSRC與C-V2X并非水火不容,C-V2X更側(cè)重智能駕駛。
早在1994年,美國高速公路管理局推出先進高速系統(tǒng)AHS研究課題,1997年成立智能汽車計劃小組研究智能交通,2005年完成研究任務(wù),提出了完整的ITS體系。同時在1999年,F(xiàn)CC就為ITS劃分了一個5850MHz-5925MHz頻帶,決定用當(dāng)時最先進的基于802.11a的技術(shù)。并分成七個獨立的頻道,分別為頻道172、174、176、178、180、182、184;各頻道均為10MHz。頻道178為控制頻道(Control Channel,CCH),負責(zé)WAVE服務(wù)廣播訊框(WAVE Service Advertisement,WSA)封包;其他頻道則為服務(wù)頻道(Service Channel,SCH),只能傳遞WAVE短信息(WAVE Short Message,WSM)封包。

同時在2003年,全球八大車廠豐田、日產(chǎn)、福特、通用、戴姆勒、克萊斯勒、大眾、寶馬成立VSCC車輛安全通訊聯(lián)盟開展DSRC車端的研究,2005年通用演示了第一個V2V系統(tǒng)。之后經(jīng)過8年的完善,2013年DSRC形成了完備的體系。
2014年2月,歐洲標準組織ETSI與CEN宣布完成第一階段基于DSRC的ITS標準,底層為IEEE 802.11P,上層為IEEE1609,同時還有SAE J2375和J2945兩個標準定義通訊格式。
2014年8月,美國交通部試圖強制立法推廣DSRC為核心的ITS,但直到今天也沒用完成強制立法。

DSRC的IEEE 1609標準架構(gòu)
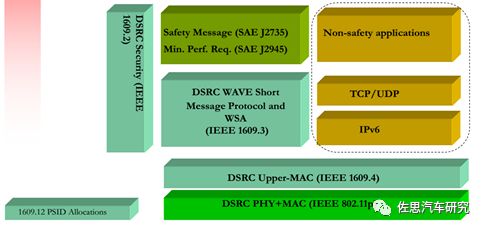
DSRC架構(gòu)標準
歐洲方面,ITS系統(tǒng)源自1973年英國運輸與道路研究所(TRRL)的SCOOT(Split, Cycle and Offset Optimization Technique),更早SCOOT模型基礎(chǔ)原自TRANSYT (TrafficNetwork Study Tool),采用了同樣的周期流分布圖(CFP)的建模方式和相近的目標函數(shù)。不過有了顯著的改進,TRANSYT的CFP是以歷史的平均交通流計算的;而SCOOT是聯(lián)機模型,CFP是實時測量的。
SCOOT的核心就是如何控制交通信號燈,中國的北京、青島、成都、重慶、大連就采用西門子的SCOOT系統(tǒng)。 當(dāng)時的技術(shù)無法利用傳感器高效計算實時交通流量,因此意義不大。但這是ITS的基礎(chǔ)方法論,SCOOT后來被德國西門子全盤繼承,并衍生出SPAT(Signal Phase and Timing)。 SCOOT是跨整個路網(wǎng)進行交通號志變換時機的最佳化,僅倚賴工程師預(yù)先以固定且有限數(shù)量的可行程序進行配置,無法彈性對應(yīng)即時路況與個別交叉路口的流量變化。
西門子在2018年推出Follow AI也就是下一代SCOOT,它首先會建立復(fù)雜的一般性規(guī)則,接著可針對每個特定的交叉路口進行個性化的適地性處理,F(xiàn)low AI根據(jù)內(nèi)建的回環(huán)(loop)偵測即時的交通流,并運用云端AI即時產(chǎn)生近乎無限數(shù)量的交通號志變換時機選項。
歐洲ITS標準主要分5個工作組 (WG).
WG1 (Application Requirements and Services):ITS中基礎(chǔ)應(yīng)用需求與服務(wù),并制定Applications與Facilities兩層之通訊協(xié)議。
WG2 (Architecture and Cross Layer):發(fā)展適合所有ITS之通訊架構(gòu)與跨層管理協(xié)議,并扮演歐洲ITS通訊架構(gòu)之協(xié)調(diào)者角色。
WG3 (Transport and Network): 規(guī)范Networking和Transport兩層之協(xié)議,并利用車載網(wǎng)絡(luò)特有之地理位置信息特性,發(fā)展制定GeoNetworking及IPv6相關(guān)協(xié)議。
WG4 (Media and Medium Related): 規(guī)范MAC和PHY兩層相關(guān)之標準,其將歐洲ITS使用之頻譜劃分為ITS-G5A、ITS-G5B與ITS-G5C三個部分,并兼顧其中之兼容性。
WG5 (Security):制定ITS相關(guān)之安全性議題,此草案為車載安全通訊標準制定之基準,規(guī)范車載環(huán)境中威脅、弱點與風(fēng)險分析,該草案已于2017年3月正式出版。
目前ETSI正著手制定第二版標準,主要涵蓋更多使用案例(Use Cases),包括自動跟車(Platooning)、協(xié)同式可適應(yīng)性巡航控制(Cooperative Adaptive Cruise Control, C-ACC),以及弱勢道路使用者(Vulnerable Road Users, VRU)等。
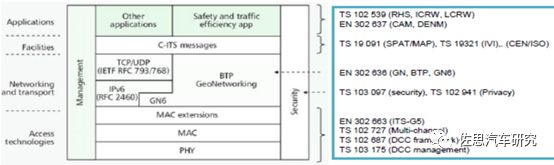
歐洲ITS標準框架
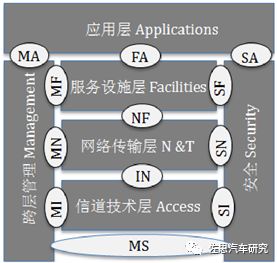
歐洲ITS的OSI模型
信道技術(shù)層( Access layer):本層提供物理層與介質(zhì)訪問控制層服務(wù),對應(yīng) OSI通信協(xié)議模型的物理層和數(shù)據(jù)鏈路層。
網(wǎng)絡(luò)傳輸層( Networking &Transport layer):本層提供數(shù)據(jù)路由與傳輸服務(wù),對應(yīng) OSI 通信協(xié)議模型的網(wǎng)絡(luò)層和傳輸層。
服務(wù)設(shè)施層( Facilities layer): 本層為多個應(yīng)用提供高層數(shù)據(jù)傳輸協(xié)議與信息管理服務(wù),對應(yīng) OSI 通信協(xié)議模型的會話層、表示層和應(yīng)用層。
除此之外, ITS-S 還分為以下功能層:
應(yīng)用層( Application layer): 應(yīng)用層模塊表示 ITS-S 應(yīng)用程序利用 ITS-S 的服務(wù)來連接一個或多個其他 ITS-S 應(yīng)用程序。兩個或多個互補的 ITS-S 應(yīng)用程序組成了一個向 ITS 用戶提供服務(wù)的應(yīng)用。
管理層( Management layer):負責(zé)管理 ITS-S 的通信以及站內(nèi)數(shù)據(jù)交換服務(wù)。
安全( Security Entity):為 OSI 通信協(xié)議棧各層提供安全服務(wù)。

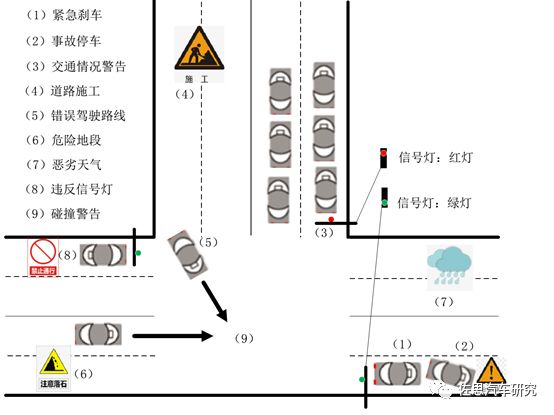
CAM與DENM是智能交通系統(tǒng)中最重要的兩種信息協(xié)議棧標準。
Decentralized Environmental Notification Message,分散環(huán)境通知信息,主要用于道路危險預(yù)警應(yīng)用,是事件觸發(fā)型信息,一旦通過車載設(shè)備檢測到了安全隱患事件(例如前方車輛緊急剎車、道路施工警告等),車載ITS的相關(guān)應(yīng)用就立即發(fā)射DENM信息。接收車輛可對比車輛自身位置與行車路線,判斷事件對自車的關(guān)聯(lián)性并預(yù)測可能的碰撞風(fēng)險,以及提前通知駕駛員采取有效的措施。根據(jù)事件地點和類型,可能要求接收到DENM信息的車輛向外轉(zhuǎn)發(fā)。
CAM(Cooperative Awareness Message),合作感知信息,這是時間觸發(fā)信息,提供車輛的速度、位置、方向燈以及交通信號系統(tǒng)如交通信號燈的狀態(tài),天氣提醒等信息。
ETSI 在 2013 年發(fā)布了道路危險警告( RHW) 應(yīng)用 , ITS-S 通過 RHW 應(yīng)用檢測到道路危險情況并觸發(fā)生成相應(yīng)的 DENM 消息,之后 ITS-S 會將這一 DENM 消息發(fā)送出去,通知一定區(qū)域范圍內(nèi)的其他車輛。
1、 原始 ITS-S 檢測到事件后要生成描述該事件用例的 DENM 并將其發(fā)送給該用例對應(yīng)的目的區(qū)域內(nèi)的其他 ITS-S。
2、 DENM 傳輸?shù)拈_始和終止由應(yīng)用層的 ITS-S 應(yīng)用程序控制。
3、 只要事件存在, DENM 就會持續(xù)發(fā)送。
4、處在目的區(qū)域內(nèi)的 ITS-S 需要將接收到的 DENM 轉(zhuǎn)發(fā)給其它 ITS-S。
5、 DENM 傳輸過程的終止, ITS-S 判斷 DENM 的有效期字段, 在到達 DENM 有效期時 ITS-S 停止發(fā)送該消息, 或者在未到達有效期時但已經(jīng)檢測到危險事件已經(jīng)解除則可以由 ITS-S 應(yīng)用程序請求生成一個通知事件已經(jīng)終止的 DENM。
6、 若收到 DENM 的 ITS-S 根據(jù)消息內(nèi)容判斷事件與自身有關(guān),則做出適當(dāng)?shù)木娼o使用者。
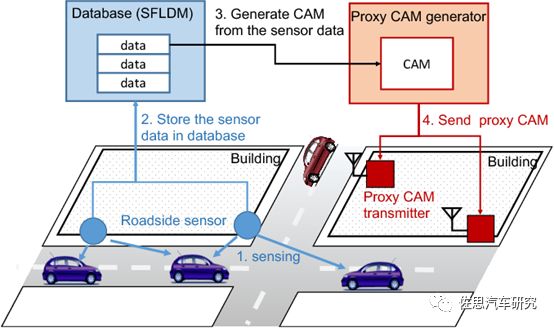
這個CAM應(yīng)用類似于長沙智能駕駛研究院發(fā)布的“V2X+交叉路口”解決方案,能夠車載傳感器所不能覆蓋的范圍,也就是NLOS。
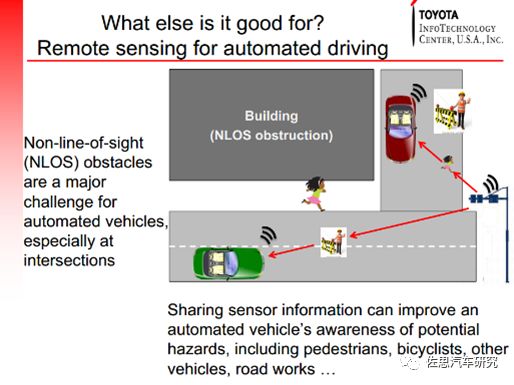
不同的是歐洲早在2011年就已經(jīng)做了完整的技術(shù)規(guī)范。路側(cè)傳感器可以是攝像頭、毫米波雷達或激光雷達。激光雷達最合適,因為能見度差的情況下反而是最易發(fā)生交通事故的時候。1550納米波長的激光雷達幾乎可以像毫米波雷達那樣全天候工作,同時激光雷達的分辨率較高。
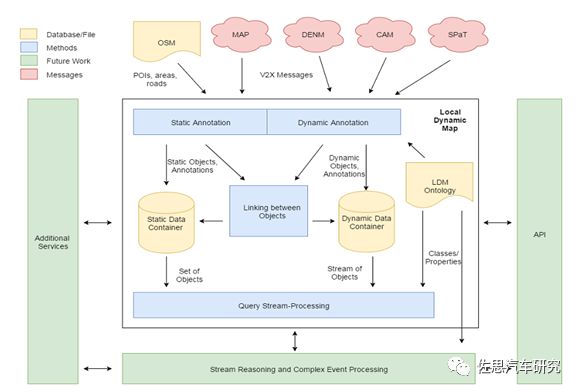
歐洲ITS整體框架
這其中承載整個系統(tǒng)的關(guān)鍵是LDM,即Local Dynamic Map。

典型LDM的4層結(jié)構(gòu),最上層基本就是V2X信息。歐洲ETSI在2014年對LDM做了詳細標準,也就是ETSI EN302895 V1.1.1,車輛通訊基礎(chǔ)應(yīng)用設(shè)置之LDM。
-
智能交通
+關(guān)注
關(guān)注
12文章
821瀏覽量
44324 -
V2X
+關(guān)注
關(guān)注
25文章
216瀏覽量
44149
原文標題:V2X與ITS的前世今生
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
科普|V2X是什么意思?

?車聯(lián)網(wǎng)V2X通信:貼片電容信號完整性優(yōu)化與EMC設(shè)計
V2X技術(shù)全解析
基于CANoe的V2X安全通信方案
安全可靠的V2X路側(cè)基礎(chǔ)設(shè)施白皮書發(fā)布
V2X車路協(xié)同系統(tǒng)

V2X車路協(xié)同系統(tǒng)

V2X車路協(xié)同系統(tǒng)

SmartDV將SDIO系列IP授權(quán)給RANiX開發(fā)車聯(lián)網(wǎng)(V2X)產(chǎn)品

基于V2X和自動駕駛HIL聯(lián)調(diào)的仿真測試系統(tǒng)開發(fā)

如何應(yīng)對V2X頻譜挑戰(zhàn)
設(shè)計仿真 | 基于VTD的V2X仿真應(yīng)用

簡述半導(dǎo)體材料的發(fā)展史
三菱電機功率器件發(fā)展史






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論