") 為大家介紹了多篇2019 CVPR的精彩、優(yōu)質(zhì)論文解讀!
為大家介紹了多篇2019 CVPR的精彩、優(yōu)質(zhì)論文解讀!

最近,AI科技大本營陸續(xù)為大家介紹了多篇 2019 CVPR 的精彩、優(yōu)質(zhì)論文解讀!為了方便大家集中學(xué)習(xí),營長特此為大家做了近期的匯總整理!不僅如此,作為清明小長假的第一天,營長精心準(zhǔn)備了更精彩的福利內(nèi)容:回顧 2018 年 CVPR 的 3 天大會,并對主要內(nèi)容進(jìn)行了整理與總結(jié),也談及了一些研究趨勢,正好可以與今年的成果進(jìn)行對比!
回顧 CVPR 2018,三天會議主要包括以下九大部分內(nèi)容:
特別版塊:專題研討會及比賽
目標(biāo)識別和場景理解問題
對圖像中人的分析研究
3D視覺問題
計算機(jī)視覺中的機(jī)器學(xué)習(xí)問題
視頻分析問題
計算攝影問題
圖像運(yùn)動及跟蹤問題
應(yīng)用
下面是去年總結(jié)的一些未來值得研究的趨勢和話題,隨著 CVPR 2019 的成果不斷跟蹤與積累,后續(xù)還可以繼續(xù)做對比與分析:
視頻分析:如視頻字幕,動作分類,預(yù)測人(行人) 移動的方向等問題
視覺情感分析
空間(房間) 中智能體的方向,虛擬房間數(shù)據(jù)集,這些話題都跟機(jī)器學(xué)習(xí)的應(yīng)用有關(guān)
視頻中的行人重識別問題
圖像的風(fēng)格轉(zhuǎn)移(GAaaaNs) 仍然是一個研究熱點
對抗性攻擊問題的分析
圖像增強(qiáng)問題,包括消除圖像脫落、陰影等問題
自然語言處理與計算機(jī)視覺領(lǐng)域的結(jié)合話題
圖像和視頻的顯著性分析
邊緣設(shè)備(edge device) 上的計算效率問題
弱監(jiān)督學(xué)習(xí)下的計算機(jī)視覺問題
域自適應(yīng)問題
機(jī)器學(xué)習(xí)的可解釋性
強(qiáng)化學(xué)習(xí)在計算機(jī)視覺領(lǐng)域中的應(yīng)用:包括網(wǎng)絡(luò)優(yōu)化,數(shù)據(jù),神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí)過程等
有關(guān)數(shù)據(jù)標(biāo)記領(lǐng)域的話題
接下來,AI科技大本營把 2018 CVPR 會議上的主要內(nèi)容劃分了八大類別為大家做進(jìn)一步的分析:
1.場景的分析與問答
2.圖像增強(qiáng)及操作
3.計算機(jī)視覺領(lǐng)域中的各種神經(jīng)網(wǎng)絡(luò)架構(gòu)
4.基于目標(biāo)驅(qū)動的導(dǎo)航系統(tǒng)及室內(nèi)3D場景
5.人物相關(guān)性分析
6.高效的深度神經(jīng)網(wǎng)絡(luò)
7.文本與計算機(jī)視覺
8.數(shù)據(jù)與計算機(jī)視覺
一、場景分析及問答
模塊主題一:Embodied Question Answering (具體的問答問題)
亮點:走向具體化的智能體,能夠聽說看,還能采取行動和進(jìn)行推理。
架構(gòu)和技術(shù)細(xì)節(jié):
視覺模型:結(jié)構(gòu)示意圖如下,以 CNN 結(jié)構(gòu)作為編碼,進(jìn)行多任務(wù)的、像素到像素的預(yù)測。
語言模型:兩層的 LSTMs 結(jié)構(gòu)。
操縱模型:結(jié)構(gòu)示意圖如下,這是一個多層次的 RL 結(jié)構(gòu)。Planner 選擇動作 (向前,向左,向右),而控制器 (controller) 將這些原始動作作為多次使用的變量,并將 controller 執(zhí)行的結(jié)果返回給 planner。
回答模型:結(jié)構(gòu)示意圖如下,檢查最后5幀,并根據(jù)圖像--問題的相似度來計算一個基于注意池化的視覺編碼,然后將這些與問題的 LSTM 編碼相結(jié)合,并在 172 個可能的答案空間上輸出 softmax 結(jié)果。
數(shù)據(jù)集:使用EQA 數(shù)據(jù)集 (環(huán)境中的問題):該數(shù)據(jù)集含有 rgb 圖像,語義分割掩碼,深度映射圖,自上而下的映射圖。此外,數(shù)據(jù)集共包含12種房型 (廚房,生活區(qū)等) 和50種對象類型,并以編程方式生成的問題,這與 CLEVR 數(shù)據(jù)集的方式類似。
應(yīng)用場景:智能體能夠在自然環(huán)境中采取行動并跟人類以自然語言的方式交流。
論文與項目地址:
https://arxiv.org/abs/1711.11543
https://embodiedqa.org/
https://github.com/facebookresearch/EmbodiedQA
模塊主題二:Learning by Asking Questions (LBA) (通過問答進(jìn)行學(xué)習(xí))
亮點:LBA Interactive Agents,決定它們需要什么樣的信息以及如何獲取這些信息。這種方式更優(yōu)于被動的監(jiān)督式學(xué)習(xí)。
架構(gòu)和技術(shù)細(xì)節(jié):給定一組圖像提出問題,以監(jiān)督學(xué)習(xí)的方式得到問題的答案。其流程如下圖所示:
問題生成模型:是一種圖像字幕生成模型,它使用以圖像特征 (第一隱藏輸入) 為條件的 LSTM 模型來生成一個問題。而問答模塊是標(biāo)準(zhǔn)的 VQA 模型。
數(shù)據(jù)集:使用 CLEVR 數(shù)據(jù)集,包含 70K 張圖片和 700 張 QA 圖片。
參考:
https://research.fb.com/publications/learning-by-asking-questions/
模塊主題三:Im2Flow: Motion Hallucination from Static Images for Action Recognition (基于靜態(tài)圖幻覺的動作識別研究)
亮點:將靜態(tài)圖像轉(zhuǎn)換為精準(zhǔn)的映射流圖,并通過 single snapshot 的方式預(yù)測隱含的、未觀察到的未來的運(yùn)動情況。這有助于靜態(tài)圖像的動作識別研究。
架構(gòu)和技術(shù)細(xì)節(jié):通過編碼--解碼的 CNN 結(jié)構(gòu)和一種新穎的光流編碼結(jié)構(gòu),來將靜態(tài)圖像轉(zhuǎn)換為映射流圖。其結(jié)構(gòu)示意圖如下:
數(shù)據(jù)集:UCF-101 HMDB-51 的視頻數(shù)據(jù)集上訓(xùn)練,該數(shù)據(jù)集含 700K 幀。
應(yīng)用場景:圖像視頻分析,字幕生成,動作識別和動態(tài)場景識別。
其他觀點:除了人類的運(yùn)動,該模型還可以用于預(yù)測場景的運(yùn)動情況,如海洋中波浪的起落等。此外,該模型也可以推斷出新圖像的運(yùn)動潛在性 (得分),即準(zhǔn)備發(fā)生的運(yùn)動和運(yùn)動的強(qiáng)度等。
論文與項目地址:
https://arxiv.org/abs/1712.04109
http://vision.cs.utexas.edu/projects/im2flow/
模塊主題四:Actor and Action Video Segmentation from a Sentence (基于語句的視頻動作、動作者分割研究)
亮點:動作由自然語句所指定 (vs 預(yù)定義好的動作詞匯表)。任何動作者 (vs 與人類接近的動作者)。
架構(gòu)和技術(shù)細(xì)節(jié):來自于自然語句的 RGB 模型,該模型用于動作者和視頻動作的分割任務(wù),包括三個組成,其結(jié)構(gòu)示意圖如下:
用 CNN 結(jié)構(gòu)來編碼表達(dá)式
用 3D CNN 結(jié)構(gòu)來對視頻進(jìn)行編碼
解碼器:通過對已編碼好的文本表征和視頻表征進(jìn)行進(jìn)行動態(tài)的卷積過程,實現(xiàn)逐像素的分割。此外,相同的模型也應(yīng)用于輸入流。
數(shù)據(jù)集:兩個流行的動作者和動作數(shù)據(jù)集,包含超過7500條的自然語言描述。
應(yīng)用場景:視頻分析,索引,字幕生成等。
其他觀點:
IoU (Intersectionction-union) 用于衡量分割結(jié)果的質(zhì)量。
句子感知 (sentence awareness) 對動作者和動作描述是有幫助的。
視頻感知 (video awareness) 有助于得到更準(zhǔn)確的分割結(jié)果。
好的效果圖如下:
論文與項目地址:
https://arxiv.org/abs/1803.07485
https://kgavrilyuk.github.io/publication/actor_action/
模塊主題五:Egocentric Activity Recognition (EAR) on a Budget (以自我為中心的動作識別研究)
亮點:基于不同的能量模型,利用 RL 學(xué)習(xí)策略。
架構(gòu)和技術(shù)細(xì)節(jié):智能眼鏡的功能受限于電池及其自身的處理能力。
數(shù)據(jù)集:基準(zhǔn)數(shù)據(jù)集采用 Multimodal 數(shù)據(jù)庫。
應(yīng)用場景:使用 AI 來幫助進(jìn)行生活助理和護(hù)理服務(wù)工作 (使用智能眼鏡得到的數(shù)據(jù)進(jìn)行動作的跟蹤和識別)。此外,EAR 還可以提供自動提醒/警告的功能,幫助認(rèn)知障礙以避免危險情況。
其他觀點:學(xué)習(xí)用戶環(huán)境是利用能量運(yùn)動和視覺方法的關(guān)鍵。
論文地址,數(shù)據(jù)集鏈接:
http://sheilacaceres.com/dataego/
http://www-personal.usyd.edu.au/~framos/Publications_files/egocentric-activity-recognition%20(2).pdf
模塊主題六:Emotional Attention: A Study of Image Sentiment and Visual Attention (情感注意力:圖像情感與視覺注意力研究)
亮點:這是第一項側(cè)重于圖像情感屬性與視覺注意力之間關(guān)系的研究。此外,該研究另一貢獻(xiàn)是創(chuàng)建 EMOtional 注意數(shù)據(jù)集 (EMOd 數(shù)據(jù)集)。
架構(gòu)和技術(shù)細(xì)節(jié):設(shè)計一個深度神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)用于顯著性預(yù)測,結(jié)構(gòu)包括一個學(xué)習(xí)圖像場景中空間和語義上下文信息的子網(wǎng)絡(luò),結(jié)構(gòu)示意圖如下。CASNet:一個對通道進(jìn)行加權(quán)操作的子網(wǎng)絡(luò) (下圖中在虛線橙色矩形內(nèi)部分),用于計算每個圖像中一組1024維特征的權(quán)重,以捕獲特定圖像語義特征信息的相對重要性。
灰色虛線箭頭表示的是通過子網(wǎng)絡(luò)修正后,圖像中不同區(qū)域的相對顯著性。
數(shù)據(jù)集:三種包含情感內(nèi)容的數(shù)據(jù)庫:EMOd 數(shù)據(jù)集包含1019張圖片,NUSEF數(shù)據(jù)集包含751張圖片,CAT 數(shù)據(jù)集包含2000張圖片。
應(yīng)用場景:用于視頻監(jiān)督,字幕生成等。
其他觀點:情感目標(biāo)會吸引簡短而強(qiáng)烈的注意力。與人類相關(guān)的目標(biāo)的情感優(yōu)先級要大于那些與人類無關(guān)的目標(biāo)。
論文地址:
https://nus-sesame.top/emotionalattention/
模塊主題七:Multi-Oriented Scene Text Detection via Corner Localization and Region Segmentation (基于角定位和區(qū)域分割的多導(dǎo)向場景文本檢測研究)
亮點:通過定位文本邊界框的角點并在相對位置上分割文本區(qū)域來檢測場景中的文本。
架構(gòu)和技術(shù)細(xì)節(jié):結(jié)合目標(biāo)檢測和語義分割的思想,并以另一種方式應(yīng)用二者。基于給定的圖像,網(wǎng)絡(luò)通過角點檢測和位置敏感性分割輸出角點和分割映射圖。然后通過對角點進(jìn)行采樣和分組來進(jìn)一步生成候選框。最后,通過分割映射圖和 NMS 抑制來得到這些候選框的分?jǐn)?shù)。其結(jié)構(gòu)示意圖如下:
數(shù)據(jù)集:ICDAR2013 數(shù)據(jù)集,ICDAR2015 數(shù)據(jù)集,MSRA-TD500 數(shù)據(jù)集, MLT 和 COCO-Text 數(shù)據(jù)集。
應(yīng)用場景:一些從自然場景圖像中提取文本信息的任務(wù):如產(chǎn)品搜索,圖像檢索,自動駕駛等。
其他觀點:與一般物體檢測相比,場景中的文本檢測更加復(fù)雜,因為:
場景文本可能存在于任意方向的自然圖像中,因此邊界框的形狀可以是旋轉(zhuǎn)的矩形或四邊形。
場景文本的邊界框的寬高比變化很大。
由于場景文本的形式可以是字符,單詞或文本行等,因此算法在定位邊界時可能會產(chǎn)生混淆。
論文地址:
https://arxiv.org/abs/1802.08948
模塊主題八:Neural baby talk (神經(jīng)網(wǎng)絡(luò)之間的對話)
亮點:Neural baby talk:這是一種新穎的框架,用于準(zhǔn)確地定位圖中的目標(biāo),同時生成自然語言描述字幕。首先,生成指數(shù)量級的模板,再將檢測過程與字幕生成過程分離,并以不同類型的監(jiān)督方式進(jìn)行處理。該研究使用神經(jīng)網(wǎng)絡(luò)的方法協(xié)調(diào)經(jīng)典的“槽填充”方法 (slot filling),同時在聽覺上和視覺上實現(xiàn)神經(jīng)網(wǎng)絡(luò)的應(yīng)用。
架構(gòu)和技術(shù)細(xì)節(jié):其結(jié)構(gòu)示意圖如下:
數(shù)據(jù)集:COCO 數(shù)據(jù)集。
應(yīng)用場景:圖像字幕生成任務(wù)。
其他觀點:該研究使目標(biāo)檢測的升級版--在目標(biāo)檢測的基礎(chǔ)上結(jié)合了自然語言的處理。
論文和github 鏈接:
https://arxiv.org/pdf/1803.09845.pdf
https://github.com/jiasenlu/NeuralBabyTalk
二、計算機(jī)視覺領(lǐng)域中的各種神經(jīng)網(wǎng)絡(luò)架構(gòu)
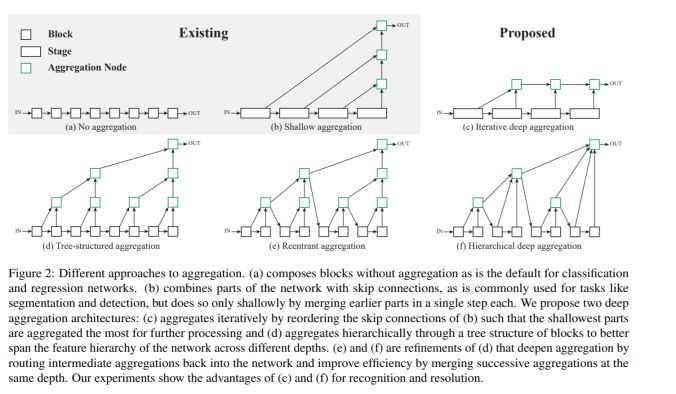
模塊主題一:Deep Layer Aggregation (深度層聚合)
亮點:深度層聚合的方式使得模型具有更準(zhǔn)確的性能表現(xiàn)和更少的參數(shù)量,同時這也為深層可視化架構(gòu)的泛化和有效擴(kuò)展應(yīng)用提供了一種方式。
架構(gòu)和技術(shù)細(xì)節(jié):模型通過學(xué)習(xí)任意模塊的聚合層輸出,表現(xiàn)出更有表現(xiàn)力的層輸入和更快速的層聚合性能。其結(jié)構(gòu)示意圖如下:
應(yīng)用場景:圖像識別,圖像分割任務(wù)。
其他觀點:該研究涉及到未來圖像識別領(lǐng)域的兩個趨勢:
更好的構(gòu)建模塊。
跳躍連接。
我們要考慮的是如何才能使二者更好得兼容,以及如何通過有效的跳躍連接來提高 DRN (擴(kuò)張性的殘差神經(jīng)網(wǎng)絡(luò)) 的準(zhǔn)確性?
論文和github 鏈接:
https://arxiv.org/abs/1707.06484
https://github.com/ucbdrive/dla
此外,作者開源了這個數(shù)據(jù)標(biāo)簽工具 (含 BSD 許可證):
http://www.scalabel.ai/
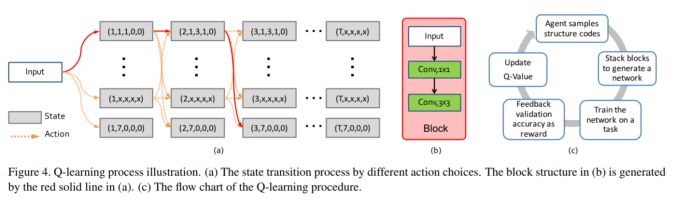
模塊主題二:Practical Block-wise Neural Network Architecture Generation (逐模塊地神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)生成)
亮點:該研究提出了一個名為 BlockQNN 的逐模塊神經(jīng)網(wǎng)絡(luò)生成管道 (pipeline)
架構(gòu)和技術(shù)細(xì)節(jié):神經(jīng)網(wǎng)絡(luò)生成管道(pipeline)模塊能夠通過帶 epsilon-greedy 探索策略的 Q-Learning 范式來自動構(gòu)建高性能的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)。此外,它還是個分布式的異步網(wǎng)絡(luò)框架,這能大大提高網(wǎng)絡(luò)的運(yùn)行速度。其結(jié)構(gòu)示意圖如下:
數(shù)據(jù)集:CIFAR,ImageNet
其他觀點:在 CIFAR 數(shù)據(jù)集上的圖像分類任務(wù):使用32個 GPU只需花費3天的時間就能自動生成網(wǎng)絡(luò)結(jié)構(gòu),這比 NASv1-Google (800GPU,28天) 所需的時間和資源要少的多。
論文鏈接:
https://arxiv.org/abs/1708.05552
模塊主題三:Relation Networks for Object Detection (用于目標(biāo)檢測的推理網(wǎng)絡(luò))
亮點:目標(biāo)關(guān)系的建議模塊 (ORM) 可以嵌入到現(xiàn)有的目標(biāo)檢測體系中 (如 Faster RCNN),并提高了目標(biāo)檢測的 mAP 值 (+ 0.5-2)。此外,該模塊能夠通過目標(biāo)的外觀特征和幾何關(guān)系間的交互來同時處理一組目標(biāo)。
架構(gòu)和技術(shù)細(xì)節(jié):其結(jié)構(gòu)示意圖如下
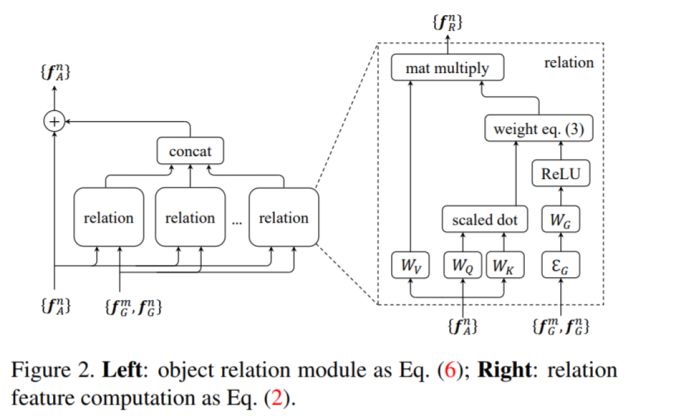
其他觀點:該研究作者聲稱,在 Faster RCNN 中插入2個建議模塊 (ORM),可以提高 2.3 mAP。此外,這種關(guān)系網(wǎng)絡(luò)的學(xué)習(xí)不僅能夠適用于具有高關(guān)系權(quán)重的目標(biāo)對,還能在不同類之間實現(xiàn)信息的共享。
論文和 github 鏈接:
https://arxiv.org/abs/1711.11575
https://github.com/msracver/Relation-Networks-for-Object-Detection
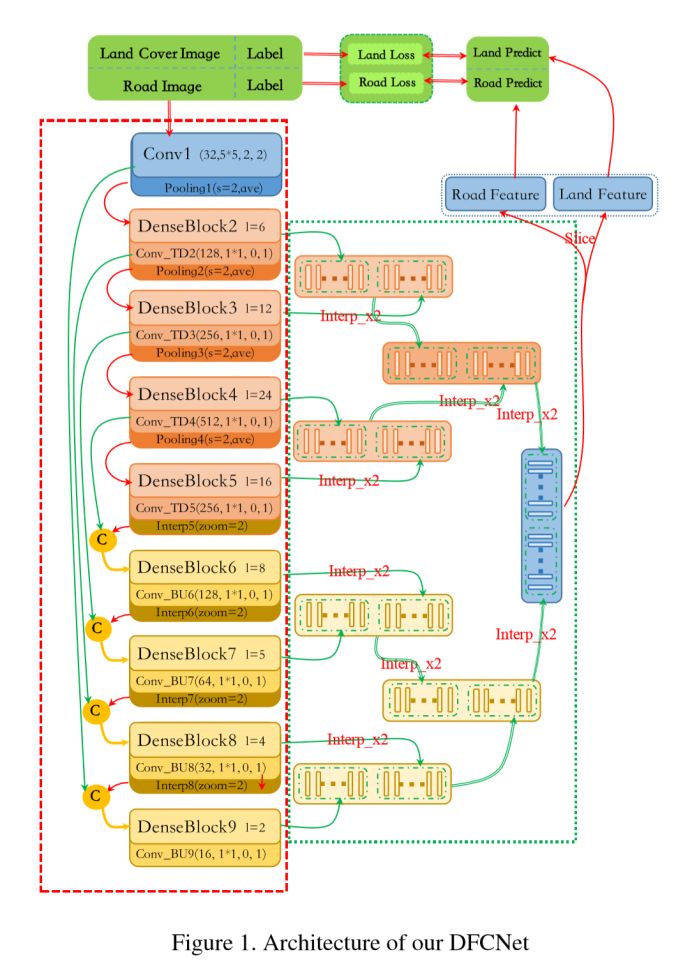
模塊主題四:DeepGlobe: A Challenge for Parsing the Earth through Satellite Images (DeepGlobe:通過衛(wèi)星圖像解析地球)
亮點:該研究包含三個部分:用于路面特征提取的 D-LinkNet,用于地面覆蓋物分類的 Dense Fusion,以及用于建筑物檢測的 Multi-task U-net。
架構(gòu)和技術(shù)細(xì)節(jié):
1、D-LinkNet:
結(jié)構(gòu):網(wǎng)絡(luò)采用 LinkNet 結(jié)構(gòu)構(gòu)建,并在其中心部分引入了擴(kuò)張卷積層 (dilated convolution layer)。Linknet 結(jié)構(gòu)在計算和存儲方面都非常高效。擴(kuò)張卷積是一種強(qiáng)大的工具,可以在不降低特征映射圖分辨率的情況下擴(kuò)大特征點的感受野。
損失函數(shù)和優(yōu)化器:以 BCE (二進(jìn)制交叉熵) 和 dice coefficient loss 作為損失函數(shù),以 Adam 作為優(yōu)化器。
數(shù)據(jù)增強(qiáng):在測試階段的圖像增強(qiáng) (TTA),包括圖像水平翻轉(zhuǎn),圖像垂直翻轉(zhuǎn),圖像對角線翻轉(zhuǎn) (每張預(yù)測圖像將被增強(qiáng) 2×2×2 = 8次),然后還原輸出圖像以匹配原始圖像。
2、Dense Fusion:密集融合網(wǎng)絡(luò)(DFCNet),其結(jié)構(gòu)示意圖如下:
Multi-task U-net:其結(jié)構(gòu)示意圖如下:
數(shù)據(jù)集:高分辨率的衛(wèi)星圖像數(shù)據(jù)集及其相應(yīng)的訓(xùn)練數(shù)據(jù)。
應(yīng)用場景:可用于三種任務(wù)挑戰(zhàn)--道路特征提取,建筑物檢測及地面覆蓋物分類。
其他觀點:對于實例分割任務(wù),除了少數(shù)一兩個研究中使用到 maskRCNN 結(jié)構(gòu),其他的研究都是基于 Unet 網(wǎng)絡(luò)展開的,如 stacked Unet,NU-net,multi-task Unet等。
項目主頁鏈接:
http://deepglobe.org/
模塊主題五:Interpretable Machine Learning for Computer Vision (計算機(jī)視覺中可解釋性的機(jī)器學(xué)習(xí))
亮點:可解釋性并不是要理解模型中所有數(shù)據(jù)點的所有細(xì)節(jié)。
架構(gòu)和技術(shù)細(xì)節(jié):詳細(xì)介紹在下面的鏈接中
應(yīng)用場景:當(dāng)你向別人展示一個 AI 項目時,大多數(shù)人仍然認(rèn)為 AI 是一個黑盒子。而該研究能夠為這一切提供不錯的解釋。
其他觀點:
何時需要可解釋性:當(dāng)我們無法將想法形式化時,可解釋性可以幫助我們實現(xiàn)。
何時不需要可解釋性:你只需要預(yù)測的情況;已被充分研究的問題;不匹配的目標(biāo)問題等。
可解釋性的例子:EDA;規(guī)則解讀;例子;稀疏性和單調(diào)性;消融測試 (ablation test);輸入特征的重要性;概念的重要性等。
如何評估:通過實驗 (human experiment and ground-truth experiment)。
關(guān)于 t-sne可視化 (google 有一篇關(guān)于 t-sne 可視化的文章):使用 T-SNE 可視化模型的思考方式。
參考鏈接:
http://deeplearning.csail.mit.edu/slide_cvpr2018/been_cvpr18tutorial.pdf
https://interpretablevision.github.io/
模塊主題六:What do deep networks like to see? (深度神經(jīng)網(wǎng)絡(luò)喜歡看什么?)
亮點:對分類器進(jìn)行交叉式重建。
架構(gòu)和技術(shù)細(xì)節(jié):其結(jié)構(gòu)示意圖如下:
數(shù)據(jù)集:YFCC100m,Imagenet
應(yīng)用場景:解釋或理解 CNNs。
其他觀點:該研究深入了解深度神經(jīng)網(wǎng)絡(luò)的每一層,這可能有助于選擇所要切割的層,提取圖像特征以及使用這些特征來訓(xùn)練新模型。
項目主頁鏈接:
https://spalaciob.github.io/s2snets.html
模塊主題七:Context Encoding for Semantic Segmentation(用于語義分割的上下文編碼)
亮點:相比于 FCN,上下文編碼模塊在略微增加計算成本的情況下,能夠顯著地改善語義分割的結(jié)果。總的說來,該研究的主要貢獻(xiàn)包括:提出語義編碼丟失 (SE-loss):這是一個利用全局場景的上下文信息的單元。實現(xiàn)了一個新的語義分割框架:上下文編碼網(wǎng)絡(luò) EncNet,增強(qiáng)了一個預(yù)訓(xùn)練好的深度殘差網(wǎng)絡(luò)。
架構(gòu)和技術(shù)細(xì)節(jié):該模塊能夠選擇性地突出與類別相關(guān)的特征映射,并簡化了網(wǎng)絡(luò)的問題。該模型在 ADE20K 測試集上取得了0.5567的最終得分,超過了 COCO Challenge 2017 的獲勝者的表現(xiàn)。此外,它還改進(jìn)了相對陰影網(wǎng)絡(luò)的特征表示,這是在 CIFAR-10 數(shù)據(jù)集上用于圖像分類任務(wù)的模型。其結(jié)構(gòu)示意圖如下:
數(shù)據(jù)集:PSCAL-Context 數(shù)據(jù)集,PASCAL VOC 2012 數(shù)據(jù)集,ADE20K 數(shù)據(jù)集,CIFAR-10 數(shù)據(jù)集
應(yīng)用場景:語音分割任務(wù)
論文及 github 鏈接:
https://arxiv.org/pdf/1803.08904.pdf
http://hangzh.com/PyTorch-Encoding/experiments/segmentation.html
https://github.com/zhanghang1989/PyTorch-Encoding
模塊主題八:Learn to See in the dark(“暗夜之眼”:學(xué)會在黑暗中觀察)
亮點:訓(xùn)練一個端到端的全卷積神經(jīng)網(wǎng)絡(luò),用于處理低光圖像。
架構(gòu)和技術(shù)細(xì)節(jié):其結(jié)構(gòu)示意圖如下:
數(shù)據(jù)集:研究中使用的數(shù)據(jù)集由作者收集的,包括夜間的室內(nèi)和室外圖像,共5094個原始短曝光圖像。
應(yīng)用場景:圖像處理
其他觀點:未來我們要思考的是這項研究能否封裝成一個 API,以方便使用。
論文及 github 鏈接:
https://arxiv.org/pdf/1805.01934.pdf
https://github.com/cchen156/Learning-to-See-in-the-Dark
三、圖像增強(qiáng)及操作
模塊主題一:xUnit: Learning a Spatial Activation Function for Efficient Image Restoration(xUit:用于圖像還原的高效空間激活函數(shù))
亮點:該研究提出的方法能夠顯著地減少模型學(xué)習(xí)過程的參數(shù)量,特別是對用于圖像超分辨率和圖像去噪的神經(jīng)網(wǎng)絡(luò),其參數(shù)量減少了一半以上。
架構(gòu)和技術(shù)細(xì)節(jié):與逐像素的激活單元 (如 ReLU 和 sigmoids) 相比,該研究提出的函數(shù)單元是一個具有空間連接性的可學(xué)習(xí)的非線性函數(shù),這使得網(wǎng)絡(luò)能夠捕獲更復(fù)雜的特征。因此,網(wǎng)絡(luò)以更少的層數(shù)就能達(dá)到相同的性能。其結(jié)構(gòu)示意圖如下。
數(shù)據(jù)集:BSD68 數(shù)據(jù)集和Rain12 數(shù)據(jù)集
應(yīng)用場景:圖像超分辨率和圖像去燥
論文及 github 鏈接:
https://arxiv.org/abs/1711.06445
https://github.com/kligvasser/xUnit
模塊主題二:Deformation Aware Image Compression(變形可感知的圖像壓縮技術(shù))
亮點:該研究中編碼器無需過多地描述精細(xì)結(jié)構(gòu)的幾何形狀,而只需要著重描述一些重要部分的幾何結(jié)構(gòu),這將大大提高了細(xì)節(jié)保存的效果 (研究結(jié)果已經(jīng)驗證)。
架構(gòu)和技術(shù)細(xì)節(jié):該研究很容易與其他的 CODEC 相結(jié)合。由于人類觀察者對部件輕微的局部平移性并不重視,受此啟發(fā)作者提出了 SSD 的變形不敏感版本 (以平方差的和作為度量):變形可感知的 SSD 結(jié)構(gòu) (DASSD)。
數(shù)據(jù)集:Berkley 的圖像分割數(shù)據(jù)集和Kodak 數(shù)據(jù)集
應(yīng)用場景:圖像壓縮
其他觀點:該研究所展現(xiàn)的視覺效果令人震撼。
論文鏈接:
https://arxiv.org/abs/1804.04593
模塊主題三:Residual Dense Network for Image Super-Resolution(用于圖像超分辨率的殘差密集型網(wǎng)絡(luò))
亮點:該研究的目標(biāo)是充分利用原始低分辨率 (LR) 圖像的分層特征。
架構(gòu)和技術(shù)細(xì)節(jié):其結(jié)構(gòu)示意圖如下:
RGB 模塊的結(jié)構(gòu)示意圖如下:
數(shù)據(jù)集:DIV2K 數(shù)據(jù)集,Set5 數(shù)據(jù)集,Set14 數(shù)據(jù)集,B100 數(shù)據(jù)集,Urban100 數(shù)據(jù)集,Manga109 數(shù)據(jù)集
應(yīng)用場景:圖像增強(qiáng)
論文和 github 鏈接:
https://arxiv.org/abs/1802.08797
https://github.com/yulunzhang/RDN
模塊主題四:Attentive Generative Adversarial Network for Raindrop Removal from a Single Image(用于單幅圖像雨滴去除的注意力生成對抗網(wǎng)絡(luò))
亮點:該研究將視覺注意力機(jī)制引入生成對抗網(wǎng)絡(luò),在這里的注意力主要是針對特定的雨滴區(qū)域。
架構(gòu)和技術(shù)細(xì)節(jié):該研究的模型混合了帶 LSTMs 的 GANs 和 Unet 網(wǎng)絡(luò),其結(jié)構(gòu)示意圖如下:
數(shù)據(jù)集:該研究使用的數(shù)據(jù)集含有 1K 圖像對。為了準(zhǔn)備數(shù)據(jù)集,研究中作者在拍照時使用了兩塊完全相同的玻璃:一塊玻璃上帶水滴,而另一塊保持清潔,以便形成對比。
應(yīng)用場景:圖像編輯處理
其他觀點:該研究使用預(yù)訓(xùn)練好的 VGG-16 模型所展現(xiàn)的視覺效果令人震撼,如下圖所示。
論文鏈接:
https://arxiv.org/abs/1711.10098
模塊主題五:Burst Denoising with Kernel Prediction Networks(用于圖像去燥的核預(yù)測網(wǎng)絡(luò))
亮點:該研究中采用CNN 結(jié)構(gòu)預(yù)測空間變化核,它可以用于圖像對齊和去燥。此外,研究中采用的一種有意思的數(shù)據(jù)生成方式,用于模型訓(xùn)練。
架構(gòu)和技術(shù)細(xì)節(jié):模型的結(jié)構(gòu)示意圖如下:
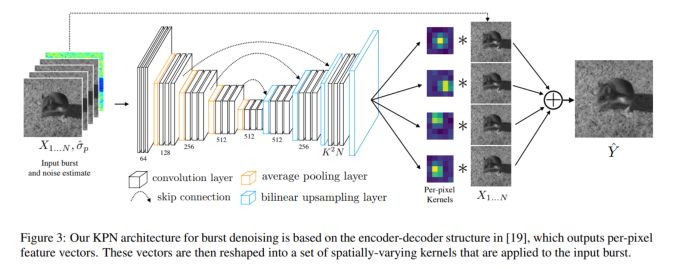
數(shù)據(jù)集:使用開放圖像數(shù)據(jù)集的圖像數(shù)據(jù)來合成訓(xùn)練數(shù)據(jù):修改圖像以引入合成的訓(xùn)練數(shù)據(jù),這些數(shù)據(jù)是未對齊的和近似噪聲的圖像。為了生成 N 幀的合成數(shù)據(jù),作者采用單張圖像并生成 N 張未對齊的、裁剪后的圖像補(bǔ)丁 (cropped patches)。
應(yīng)用場景:圖像相關(guān)的應(yīng)用
其他觀點:在真實的數(shù)據(jù)集上 (昏暗條件下用 Nexus 6P手機(jī)拍攝),作者聲稱了該研究具有良好的表現(xiàn):模型是在合成數(shù)據(jù)集上進(jìn)行訓(xùn)練的,經(jīng)一些圖像預(yù)處理后在真實數(shù)據(jù)集進(jìn)行基準(zhǔn)測試,其中圖像預(yù)處理操作包括:去除黑暗度,抑制熱點像素 (hot pixels),交替幀的全像素對齊等。
論文和 github 鏈接:
https://arxiv.org/abs/1712.02327
https://github.com/google/burst-denoising
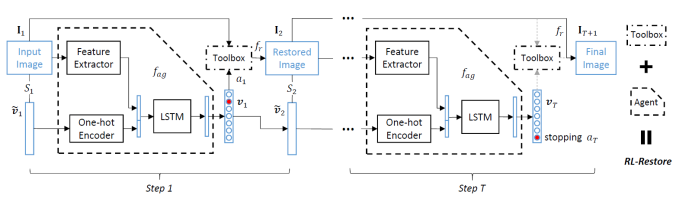
模塊主題六:Crafting a Toolchain for Image Restoration by Deep Reinforcement Learning(利用深度強(qiáng)化學(xué)習(xí)精心設(shè)計的 Toolchain 用于圖像還原)
亮點:Toolbox 由專門處理小規(guī)模不同任務(wù)的 CNN 結(jié)構(gòu)和 RL 組成:通過學(xué)習(xí)策略來選擇最合適的工具以便恢復(fù)受損圖像。
架構(gòu)和技術(shù)細(xì)節(jié):模型的結(jié)構(gòu)示意圖如下:
數(shù)據(jù)集:DIV2K 數(shù)據(jù)集,一個受損圖像的數(shù)據(jù)集并添加部分合成的數(shù)據(jù)。
應(yīng)用場景:圖像相關(guān)的應(yīng)用
其他觀點:該研究在真實數(shù)據(jù)集上表現(xiàn)得相當(dāng)良好。智能代理能夠自主決定何時停止圖像恢復(fù)。此外,該框架也能處理并恢復(fù)真實圖像的扭曲。
項目主頁和 github 鏈接:
http://mmlab.ie.cuhk.edu.hk/projects/RL-Restore/
http://mmlab.ie.cuhk.edu.hk/projects/RL-Restore/
四、基于目標(biāo)驅(qū)動的導(dǎo)航系統(tǒng)及室內(nèi) 3D 場景
模塊主題一:Density Adaptive Point Set Registration(基于密度自適應(yīng)機(jī)制的點集配準(zhǔn)研究)
亮點:該研究能夠成功解決地面激光雷達(dá)應(yīng)用中常見的密度嚴(yán)重變化問題。
架構(gòu)和技術(shù)細(xì)節(jié):將場景的潛在結(jié)構(gòu)視為一個潛在的概率分布模型,以保證點集密度變化的不變性。然后,基于期望最大化的框架,通過最小化 Kullback-Leibler 散度來推斷場景的概率模型及其配準(zhǔn)參數(shù)。該研究中還引入了觀察的權(quán)重函數(shù)。
數(shù)據(jù)集:合成數(shù)據(jù)集:通過在室內(nèi)3D場景的多邊形網(wǎng)格上模擬點采樣過程來構(gòu)建合成點云數(shù)據(jù)。此外,研究中還使用到 Virtual Photo 數(shù)據(jù)集和 ETH TLS 數(shù)據(jù)集。
應(yīng)用場景:激光相關(guān)的應(yīng)用,3D 地圖,場景理解等。
其他觀點:該研究的作者在幾個具有挑戰(zhàn)性的、來自真實世界的激光雷達(dá)數(shù)據(jù)集上進(jìn)行了大量實驗,并對3D 場景的基礎(chǔ)結(jié)構(gòu)和采集過程進(jìn)行建模,以獲得對密度變化的魯棒性。
論文鏈接:
https://arxiv.org/abs/1804.01495
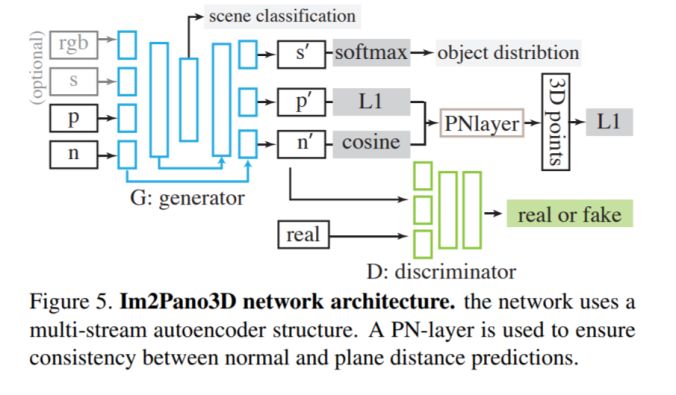
模塊主題二:Im2Pano3D: Extrapolating 360 Structure and Semantics Beyond the Field of View (通過外推法獲取360度的結(jié)構(gòu)及視野外的語義信息)
亮點:為了簡化 3D 結(jié)構(gòu)的預(yù)測,我們提出一種平面方程來對3D 表面進(jìn)行參數(shù)化,并訓(xùn)練模型對這些參數(shù)進(jìn)行直接預(yù)測。
架構(gòu)和技術(shù)細(xì)節(jié):
該研究的核心思想:利用室內(nèi)環(huán)境的高度結(jié)構(gòu)化,通過學(xué)習(xí)許多典型場景的統(tǒng)計數(shù)據(jù),模型能夠利用強(qiáng)大的上下文信息來預(yù)測超出視野范圍 (Field of View,F(xiàn)oV) 的內(nèi)容。
使用多個損失函數(shù):逐像素精度損失,使用 Patch-GAN 獲取的 mid-level 上下文一致性的對抗損失,以及通過場景類別和目標(biāo)分布的全局場景一致性測量。最終,每個通道的損失是這三個損失的加權(quán)和。
數(shù)據(jù)集:3D House 數(shù)據(jù),其中包含合成的房間 (SUNCG) 和真實的房間(Matterplot3D)。
應(yīng)用場景:機(jī)器人應(yīng)用,基于目標(biāo)驅(qū)動的導(dǎo)航,下一最佳視角的估計等。
其他觀點:Im2Pano3D 能夠預(yù)測未知場景的 3D 結(jié)構(gòu)和語義信息,實現(xiàn)超過56%的像素精度和小于 0.52m 的平均距離誤差。研究還表明經(jīng)合成數(shù)據(jù) SUNCG預(yù)訓(xùn)練,能夠顯著地提高了模型的性能。此外,論文進(jìn)一步介紹了人類應(yīng)對場景補(bǔ)全任務(wù)的研究結(jié)果:雖然目前神經(jīng)網(wǎng)絡(luò)的效果并不是很好,但卻是非常有前途的一個方向。
項目主頁和 github 鏈接:
http://im2pano3d.cs.princeton.edu/
https://github.com/shurans/im2pano3d
模塊主題三:Vision-and-Language Navigation: Interpreting visually-grounded navigation instructions in real environments (視覺到語言:在真實環(huán)境中解釋視覺的指示信息)
亮點:真實環(huán)境中平均的指示信息長度:29個由自然語言構(gòu)成的單詞。該研究提出第一個用于真實建筑物導(dǎo)航的基準(zhǔn)數(shù)據(jù)集。
架構(gòu)和技術(shù)細(xì)節(jié):研究中采用 RNN (Seq2Seq LSTM) 結(jié)構(gòu)。
數(shù)據(jù)集:Matterport3D 數(shù)據(jù)集,Room-to-Room (R2R) 數(shù)據(jù)集,測試數(shù)據(jù)集采用的是未知的建筑物數(shù)據(jù)。
應(yīng)用場景:機(jī)器人應(yīng)用
其他觀點:這是一項成功的研究:作者介紹了 Matterport3D 模擬器,這是一個基于 Matterport3D 數(shù)據(jù)集的智能代理研究,并開發(fā)了新型大規(guī)模 RL 可視化的模擬環(huán)境。
項目主頁鏈接:
https://bringmeaspoon.org/
模塊主題四:Sim2Real View Invariant Visual Servoing by Recurrent Control (通過循環(huán)控制的 Sim2Real 視覺視角不變形研究)
亮點:視覺服務(wù)系統(tǒng)利用其對過去運(yùn)動的記憶來理解動作如何在當(dāng)前的視覺點影響機(jī)器人運(yùn)動,糾正錯誤并逐漸靠近目標(biāo)。研究中使用模擬數(shù)據(jù)和一個強(qiáng)化學(xué)習(xí)目標(biāo)來學(xué)習(xí)該循環(huán)控制器。
架構(gòu)和技術(shù)細(xì)節(jié):視覺服務(wù)系統(tǒng)主要使用視覺反饋機(jī)制將工具或終點移動到所需位置。該研究的目標(biāo)是由要查詢的目標(biāo)圖像所指示,并且網(wǎng)絡(luò)必須都找出該目標(biāo)在圖像中的位置。模型的結(jié)構(gòu)示意圖如下:
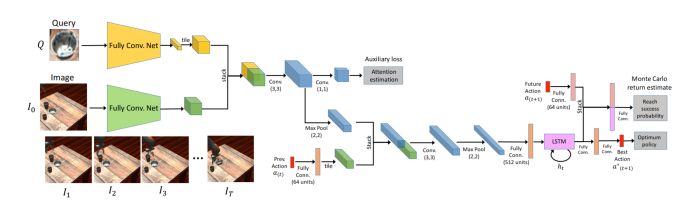
數(shù)據(jù)集:通過大量生成具有不同相機(jī)位置,對象和紋理數(shù)據(jù)來合成強(qiáng)監(jiān)督的訓(xùn)練數(shù)據(jù)。
應(yīng)用場景:機(jī)器人應(yīng)用
其他觀點:這是一項有趣,但無法馬上投入生產(chǎn)應(yīng)用的研究。
論文和項目主頁鏈接:
https://arxiv.org/pdf/1712.07642
https://fsadeghi.github.io/Sim2RealViewInvariantServo/
五、人物相關(guān)性分析
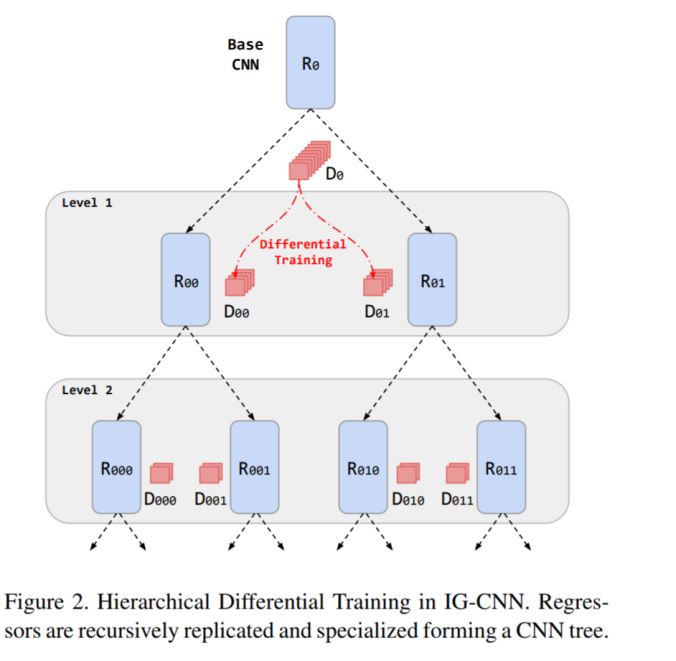
模塊主題一:Divide and Grow: Capturing Huge Diversity in Crowd Images With Incrementally Growing CNN (用遞增式 CNN 結(jié)構(gòu)來捕捉圖像中人群的多樣性)
亮點:該研究采用遞歸式的 CNN 結(jié)構(gòu)來估計人群數(shù)量。
架構(gòu)和技術(shù)細(xì)節(jié):在預(yù)訓(xùn)練基礎(chǔ) CNN 模型后,逐步構(gòu)建 CNN 樹模型,其中每個節(jié)點表示在子數(shù)據(jù)集上微調(diào)的回歸量。回歸量的計算是通過復(fù)制樹葉節(jié)點每個回歸量并經(jīng)差分訓(xùn)練專門化子網(wǎng)絡(luò)來實現(xiàn)的。模型的結(jié)構(gòu)示意圖如下:
數(shù)據(jù)集:Shanghaitech 數(shù)據(jù)集,UCF CC 50 數(shù)據(jù)集,World Expo10 數(shù)據(jù)集。
應(yīng)用場景:與監(jiān)視有關(guān)的應(yīng)用
其他觀點:該研究的一大亮點是其度量標(biāo)準(zhǔn):采用平均絕對誤差和均方誤差結(jié)合。此外,CNN 樹結(jié)構(gòu)的葉節(jié)點處的回歸量是在沒有任何手動指定標(biāo)準(zhǔn)的情況下才記得到的,無需任何的專家干預(yù)。
論文鏈接:
http://openaccess.thecvf.com/content_cvpr_2018/html/2726.html
模塊主題二:Connecting Pixels to Privacy and Utility: Automatic Redaction of Private Information in Images (將像素與個人隱私和實用程序相連接:自動編輯圖像中的私人信息)
亮點:這是第一個能夠自動編輯各種私人信息的研究。也是第一個提出大型的私人圖像數(shù)據(jù)集,這些數(shù)據(jù)都是在真實環(huán)境中采集得到的,研究中對各種隱私類別進(jìn)行像素和實例級別的標(biāo)簽注釋。
架構(gòu)和技術(shù)細(xì)節(jié):該研究的主要挑戰(zhàn)是要對多種形式的私人信息 (Textual,Visual,Multimodal) 進(jìn)行跨形式、多屬性的整體編輯。模型的結(jié)構(gòu)示意圖如下:
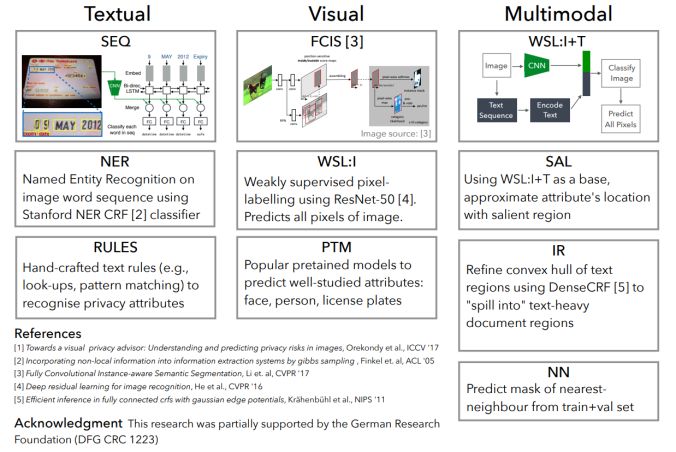
數(shù)據(jù)集:該研究采用新的數(shù)據(jù)集,擴(kuò)展了原始的 Visual Privacy (VISPR) 數(shù)據(jù)集,增加了高質(zhì)量的像素和實例級標(biāo)簽注釋。最終,作者提出了一個包含 8.5k 張圖像的數(shù)據(jù)集,這些圖像對24種隱私屬性進(jìn)行了 47.6k 個實例注釋。
應(yīng)用場景:隱私數(shù)據(jù)的清洗
其他觀點:該研究所提出的方法在手動編輯的情況下能夠有效地實現(xiàn)對多種隱私信息與實用程序的權(quán)衡,取得83%的性能表現(xiàn)。
項目主頁和 github 鏈接:
https://resources.mpi-inf.mpg.de/d2/orekondy/redactions/
https://github.com/tribhuvanesh/visual_redactions
模塊主題三:Fashion AI (時尚界的 AI)
亮點:這是來自阿里巴巴團(tuán)隊提出的 Fashion AI 研究。
架構(gòu)和技術(shù)細(xì)節(jié):該研究能夠根據(jù)時尚的衣服圖片自動創(chuàng)建屬于你自己的衣柜。
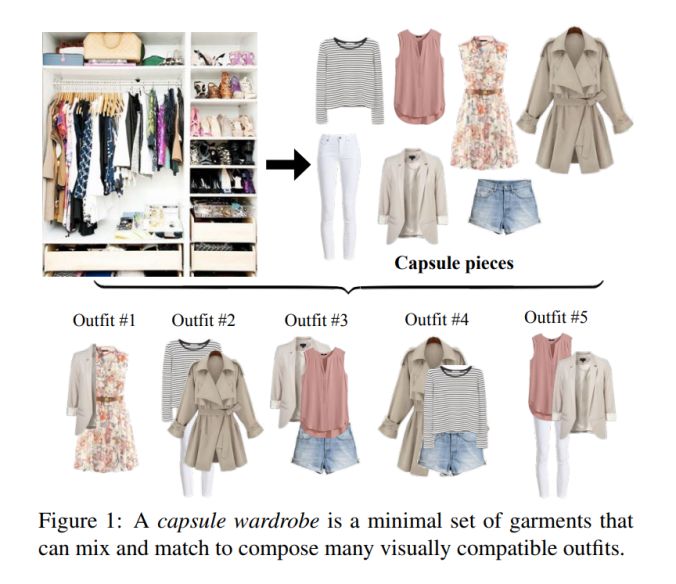
數(shù)據(jù)集:數(shù)據(jù)來源主要包括兩個方面:首先是來自淘寶上的很多衣服圖片。此外,在 Google 上使用屬性名稱進(jìn)行關(guān)鍵詞搜索以獲取大量的衣服圖像數(shù)據(jù)。總的來說,最終每個屬性有 100-300 張圖片,共由 12K 張圖片數(shù)據(jù)構(gòu)成。
應(yīng)用場景:阿里巴巴提出的 Fashion AI 應(yīng)用能夠為造型師自動化地探索服裝的搭配。首先,探索多張圖像并嘗試識別不同風(fēng)格的衣服。接著,在網(wǎng)站上基于給定的一件 T 恤,F(xiàn)ashion AI 能夠為你推薦相匹配的褲子或裙子。
論文鏈接在:
https://arxiv.org/pdf/1712.02662.pdf
六、高效的深度神經(jīng)網(wǎng)絡(luò)
模塊主題一:Efficient and accurate CNN Models at Edge compute platforms(用于Edge 計算平臺的高效而精準(zhǔn)的 CNN 模型)
亮點:該研究提出的 CNN 模型在 DeepLens 上以 CPU 運(yùn)行實時的目標(biāo)檢測的速度比在 GPU 上更快。
架構(gòu)和技術(shù)細(xì)節(jié):該研究由 XNOR.AI 團(tuán)隊提出。隨著對 Edge 設(shè)備隱私性、安全性及帶寬的需求不斷增長,該研究團(tuán)隊提出了自己的解決方案:
精度較低 (量化):固定點,二進(jìn)制 (XNOR-Net)
稀疏模型:基于 CNN 的查找和分解
緊湊型網(wǎng)絡(luò)設(shè)計:移動網(wǎng)絡(luò) (Mobile Net)
如何提高準(zhǔn)確性:標(biāo)簽精煉。
應(yīng)用場景:用于 Edge 設(shè)備
其他觀點:圖像標(biāo)簽應(yīng)該是富含類別的信息的一種軟標(biāo)識。當(dāng)前圖像標(biāo)簽所面臨的挑戰(zhàn) (以 Imagenet 為例):
標(biāo)簽具有誤導(dǎo)性:如下圖“波斯貓”的例子:
在無需任何背景的情況下,隨機(jī)裁剪可以制作訓(xùn)練數(shù)據(jù)。
如果 chihuahua 被錯誤分類為貓或汽車,則會受到同等量級的懲罰。
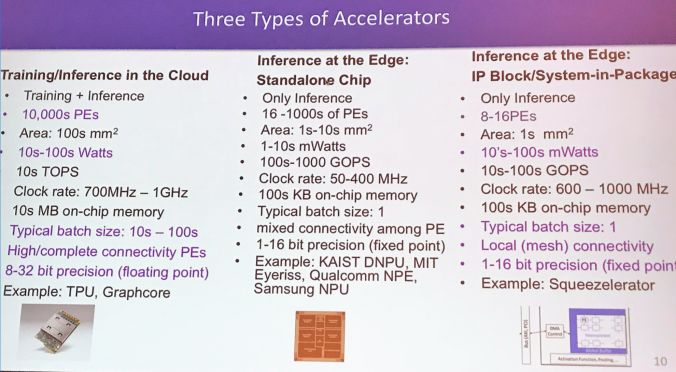
模塊主題二:Co-Design of Deep Neural Nets and Neural Net Accelerators for Embedded Vision Applications (為嵌入式視覺應(yīng)用聯(lián)合設(shè)計深度神經(jīng)網(wǎng)絡(luò)及其加速器)
亮點:該研究提出的觀點是深度神經(jīng)網(wǎng)絡(luò)及其加速器需要聯(lián)合設(shè)計。
架構(gòu)和技術(shù)細(xì)節(jié):流行的神經(jīng)網(wǎng)絡(luò)及其進(jìn)行目標(biāo)檢測的計算要求如下圖所示(源于 MobileNetV2 論文):
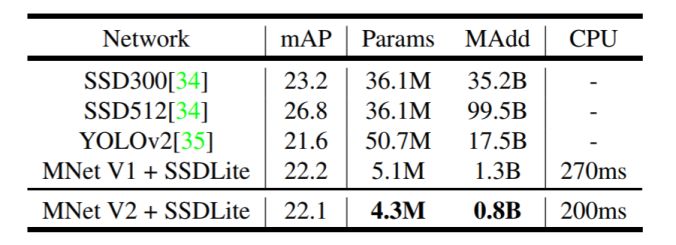
與操作相比,速度與內(nèi)存訪問的相關(guān)性更高更相關(guān);與計算相比,能量消耗與存儲器訪問更相關(guān)。
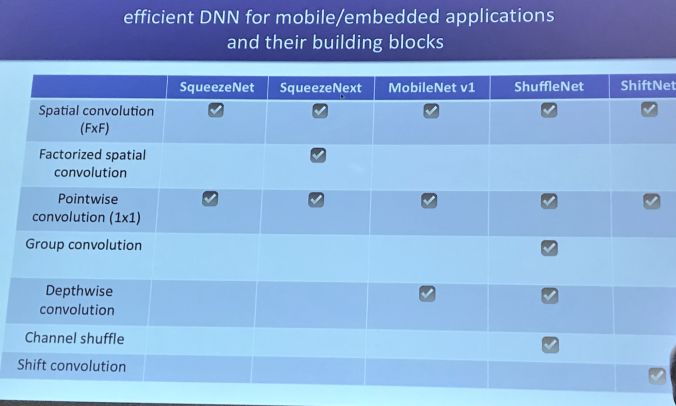
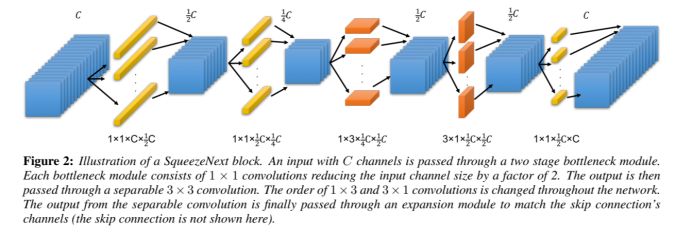
SqueezeNet 網(wǎng)絡(luò):基于硬件可感知的神經(jīng)網(wǎng)絡(luò),其結(jié)構(gòu)示意圖如下:
應(yīng)用場景:用于 Edge 設(shè)備
其他觀點:
高效的 DNN 計算的關(guān)鍵在于數(shù)據(jù)重用性。
不同的 CNN 層具有數(shù)據(jù)重用的不同模式。
不同的神經(jīng)網(wǎng)絡(luò)加速器架構(gòu)支持不同數(shù)據(jù)類型的重用 (輸出 vs 權(quán)重)
論文鏈接:
https://arxiv.org/abs/1804.10642
模塊主題三:Intel deployment tutorial(Intel 的部署教程)
亮點:OpenCV 是計算機(jī)視覺領(lǐng)域最廣泛使用的庫。
架構(gòu)和技術(shù)細(xì)節(jié):“OpenVINO”(開源的視覺推理和神經(jīng)網(wǎng)絡(luò)優(yōu)化工具包):這是被 Intel 內(nèi)部廣泛使用的計算機(jī)視覺工具包,包括跨 CPU,GPU,FPGA,VPU,IPU 等傳統(tǒng)計算機(jī)視覺庫 OpenCV 和深度學(xué)習(xí)工具包。
允許在 Edge 設(shè)備上進(jìn)行基于 CNN 的深度學(xué)習(xí)推理。
在 Intel CV 加速器上支持跨平臺的異構(gòu)執(zhí)行,使用支持 CPU ,Intel 集成顯卡,Intel Movidius? Neural Compute Stick 和 FPGA 的一個通用 API。
通過一個易于使用的 CV 函數(shù)庫和預(yù)優(yōu)化的內(nèi)核,加快產(chǎn)品上市速度。
優(yōu)化 CV 標(biāo)準(zhǔn)的調(diào)用,包括OpenCV *,OpenCL?和OpenVX *。
應(yīng)用場景:本教程涉及到 OpenCV,在未來的 CV 項目可能還會更多地考慮關(guān)于 OpenCV的內(nèi)容。
其他觀點:這是一個用于高性能 CV 和 DL 推理的開發(fā)工具包,能夠解決 CV 和 DL 部署的相關(guān)問題。
參考鏈接:
https://software.intel.com/en-us/openvino-toolkit
https://opencv.org/CVPR-2018-tutorial.html
七、文本與計算機(jī)視覺
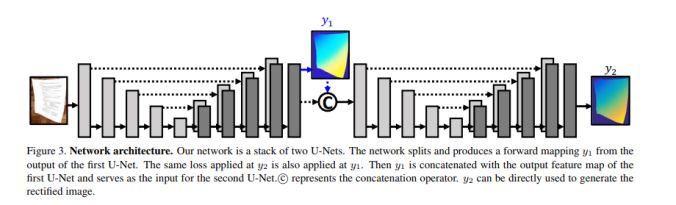
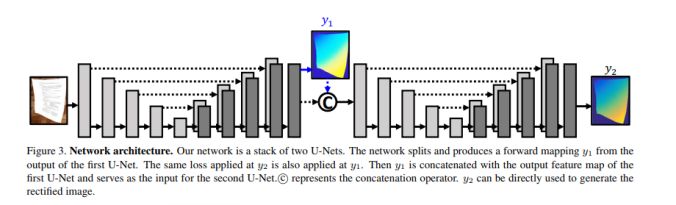
模塊主題一:DocUnet: Document Image Unwarping via A stacked U-Net (DocUnet:通過一個堆疊的 U-Net 展開文檔圖像)
亮點:本研究實現(xiàn)了一個具有中間層監(jiān)督機(jī)制的堆疊 U-Net,以從失真圖像直接預(yù)測其修正版本的前向映射圖。
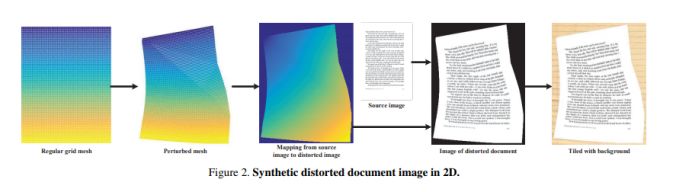
架構(gòu)和技術(shù)細(xì)節(jié):研究中提出的數(shù)據(jù)增強(qiáng)操作來提高模型的泛化能力:利用可描述的紋理數(shù)據(jù)集(DTD),產(chǎn)生各種背景紋理數(shù)據(jù);在原始數(shù)據(jù)的 HSV 色彩空間中添加抖動處理以放大圖像亮度和紙張顏色變化;通過一個投射變換來解決視角變化問題。模型的結(jié)構(gòu)示意圖如下圖所示:
數(shù)據(jù)集:合成數(shù)據(jù)集,如下圖所示:
應(yīng)用場景:文本分析。
其他觀點:該研究中使用合成數(shù)據(jù)集來訓(xùn)練模型,而在真實數(shù)據(jù)集上進(jìn)行評估測試。
論文鏈接:
http://www.juew.org/publication/DocUNet.pdf
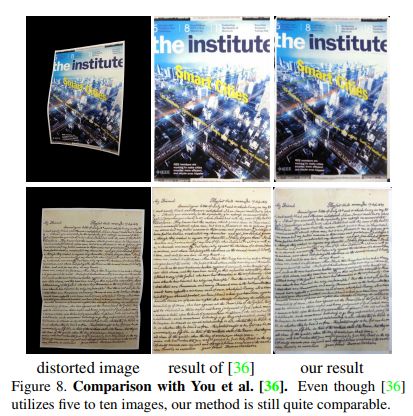
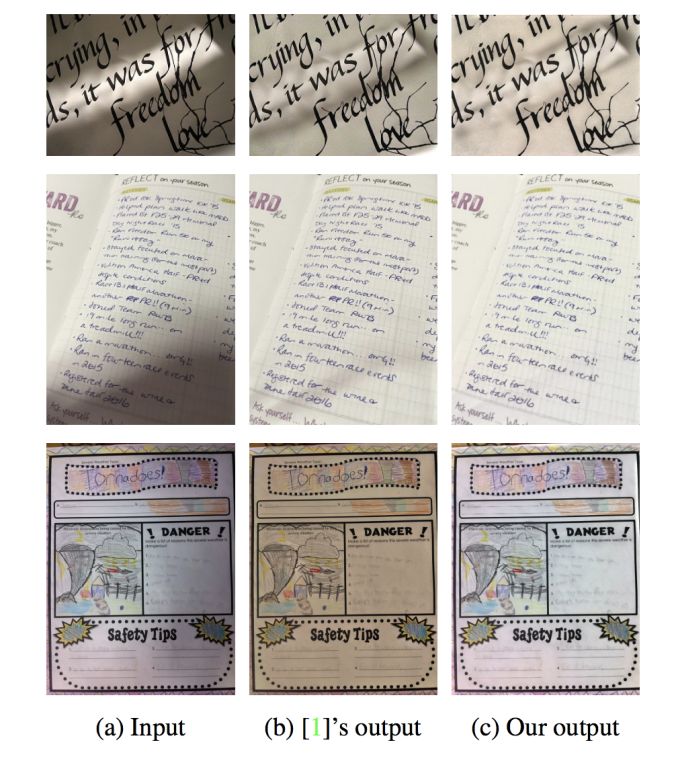
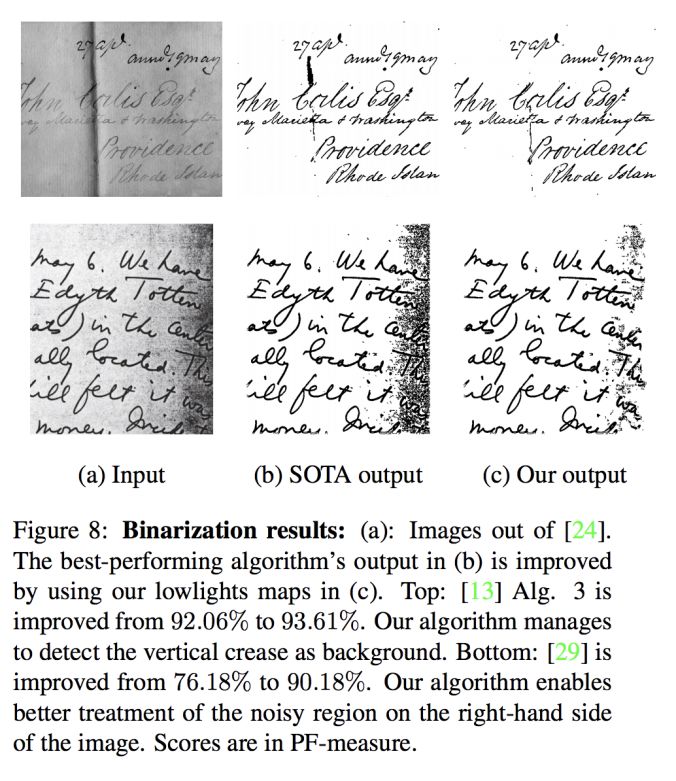
模塊主題二:Document enhancement using visibility detection (基于視覺檢測的文本增強(qiáng)研究)
亮點:本研究主要是基于計算機(jī)視覺檢測技術(shù),來實現(xiàn)文本的增強(qiáng),其實驗效果如下圖所示。
架構(gòu)和技術(shù)細(xì)節(jié):
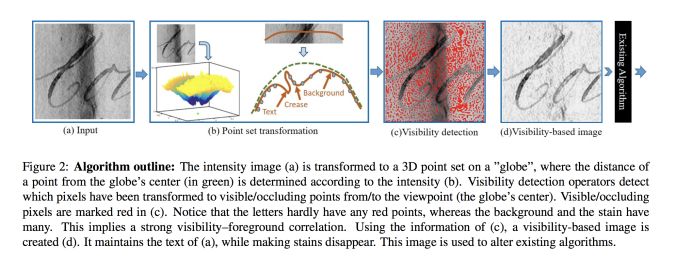
應(yīng)用場景:文本圖像的二值化,文本去陰影等應(yīng)用。
其他觀點:該研究可用于預(yù)處理文檔,然后將圖像傳遞給 OCR,實現(xiàn)在惡劣的光線條件下處理扭曲的文檔圖像。
論文鏈接:
http://webee.technion.ac.il/~ayellet/Ps/18-KKT.pdf
八、數(shù)據(jù)與計算機(jī)視覺
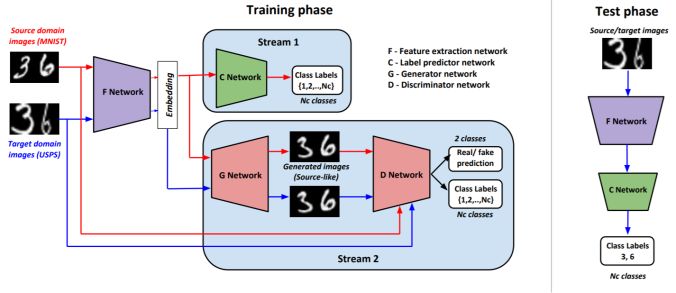
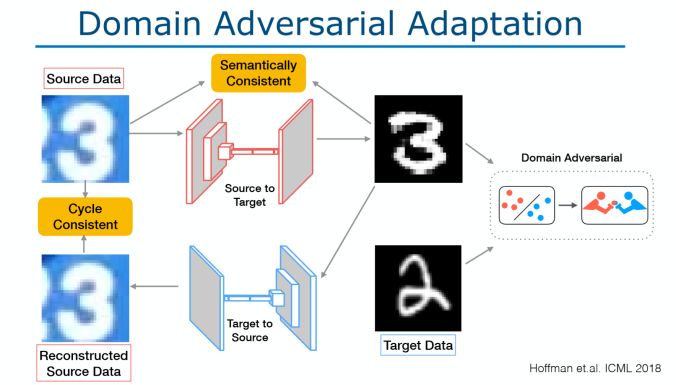
模塊主題一:Generate To Adapt: Aligning Domains using Generative Adversarial Network (生成自適應(yīng):利用生成對抗網(wǎng)絡(luò)實現(xiàn)域?qū)R)
亮點:本研究利用無監(jiān)督數(shù)據(jù),通過 GAN 拉近源分布和目標(biāo)分布,使二者更接近聯(lián)合的特征空間。
架構(gòu)和技術(shù)細(xì)節(jié):模型的結(jié)構(gòu)示意圖如下圖所示:
源域的更新:使用監(jiān)督分類丟失來更新 F 和 CNNs;F 和 G.D 使用對抗性損失來更新,以產(chǎn)生類別一致的源圖像。
目標(biāo)域更新:更新FNN,以便目標(biāo)嵌入 (當(dāng)通過 GAN 傳遞時) 產(chǎn)生類似的圖像源;這里的損失將源特征表征和目標(biāo)特征表征對齊。
數(shù)據(jù)集:DIGITS 和 OFFICE 數(shù)據(jù)集。此外,從合成數(shù)據(jù)到真實數(shù)據(jù)的域自適應(yīng)過程的數(shù)據(jù)集;從 CAD 數(shù)據(jù)集到 Pascal,VISDA 數(shù)據(jù)集。
應(yīng)用場景:用于在未知數(shù)據(jù)上改善 CNN 的性能。
其他觀點:
與 Office 實驗相比,該研究中數(shù)字實驗的圖像生成質(zhì)量更佳。
該研究中生成器能夠以類別一致的方式為源輸入和目標(biāo)輸入生成類似的源圖像。
該研究中,Office 實驗會出現(xiàn)模式崩潰 (mode collaspe) 現(xiàn)象。
該研究的 Office 實驗表明,GAN 模型由合成圖像生成逼真圖像的困難使得以跨域圖像生成的方法作為數(shù)據(jù)增強(qiáng)操作也變得非常困難。值得注意的是,研究中提出的方法依賴于圖像生成,并將其作為特征提取網(wǎng)絡(luò)導(dǎo)出豐富梯度模式,因此即使存在嚴(yán)重的模式崩潰現(xiàn)象和較差的生成質(zhì)量,該方法也能很好地工作。
論文和 github 鏈接:
https://arxiv.org/abs/1704.01705
https://github.com/yogeshbalaji/Generate_To_Adapt
模塊主題二:COCO-Stuff: Thing and Stuff Classes in Context (COCO-Stuff:上下文中的物體和填充物類別)
亮點:眾所周知的是,COCO 數(shù)據(jù)集缺少數(shù)據(jù)標(biāo)注。本項研究通過密集的、逐像素填充注釋的方式來增強(qiáng) COCO 數(shù)據(jù)集。
架構(gòu)和技術(shù)細(xì)節(jié):由于 COCO 數(shù)據(jù)是復(fù)雜的、含有大量物體的自然場景圖像,因此 COCO-Stuff 這項研究能夠探索不同物體之間的豐富關(guān)系,也能為完整的場景理解研究奠定基礎(chǔ)。
數(shù)據(jù)集:COCO 2017 數(shù)據(jù)集,其中包含 164K 張圖像,帶有91個類別的像素標(biāo)注。COCO-Stuff 包含172個類別:其中有 80個類別與 COCO 數(shù)據(jù)集中的相同。另外的91個類別是由專家標(biāo)注的。還有1個未標(biāo)注的類別只在兩種情況下使用:如果標(biāo)簽不屬于上述171個預(yù)定義類中的任何一個,或者標(biāo)注工具無法推斷像素的標(biāo)簽時才使用這個未標(biāo)注類別。
應(yīng)用場景:用于改善語義分割的性能。
論文鏈接:
http://openaccess.thecvf.com/content_cvpr_2018/papers/Caesar_COCO-Stuff_Thing_and_CVPR_2018_paper.pdf
模塊主題三:Workshop session: vision with sparse and scarce data (研討會專題:稀疏數(shù)據(jù)和少量數(shù)據(jù)情況下的視覺研究)
亮點:由Judy Hoffman 演講的關(guān)于 Make your data count 的報告。Imagenet 數(shù)據(jù)集有偏見的,因為它主要來自社交媒體的數(shù)據(jù),例如人們喜歡將狗的正臉看作狗圖片等等。在現(xiàn)實生活中,如果我們的數(shù)據(jù)是低分辨率的,運(yùn)動模糊的或姿勢變化的短視頻,那么模型將無法很好地運(yùn)行。
架構(gòu)和技術(shù)細(xì)節(jié):我們該如何改善模型的泛化能力呢?當(dāng)視覺環(huán)境發(fā)生變化或出現(xiàn)偏差時,我們要讓模型學(xué)習(xí)無法區(qū)分域的表示,可以通過下面兩種方法實現(xiàn):
深度域自適應(yīng):如下圖所示。
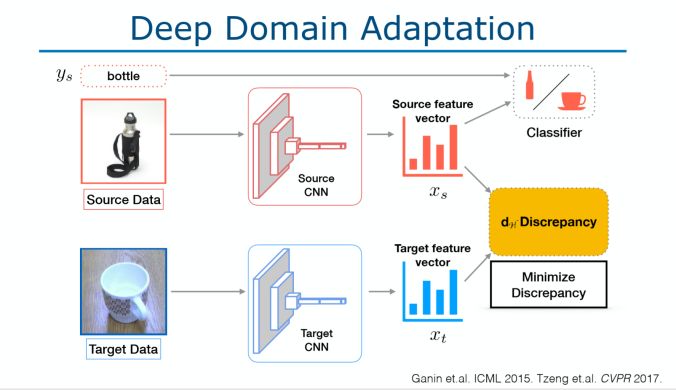
域?qū)棺赃m應(yīng):如下圖所示。
數(shù)據(jù)集:研究中采用 ImageNet 數(shù)據(jù)集和 SYNTHIA 數(shù)據(jù)集。
應(yīng)用場景:
跨城市的自適應(yīng):以德國的數(shù)據(jù)進(jìn)行訓(xùn)練,但是以舊金山的數(shù)據(jù)進(jìn)行測試 (標(biāo)志,隧道,道路大小)。
跨季節(jié)的自適應(yīng):采用 SYNTHIA數(shù)據(jù)集。
跨季節(jié)的像素自適應(yīng),以秋天的數(shù)據(jù)生成冬天的數(shù)據(jù)
合成真實像素的自適應(yīng):以合成的 GTA 數(shù)據(jù)進(jìn)行訓(xùn)練,以德國的數(shù)據(jù)進(jìn)行測試。
其他觀點:從 Judy hoffman的演講中可以發(fā)現(xiàn):該研究涉及到 GANs 的知識,同時這也是計算機(jī)視覺中的常見問題。以往,我們通常都是使用轉(zhuǎn)移學(xué)習(xí)來處理這些問題,但是 Judy hoffman 這次的演講為我們提供了一些解決交叉自適應(yīng)問題的新見解。
More and More
CVPR 2018 open access
http://openaccess.thecvf.com/CVPR2018.py
CVPR 2018 視頻
https://www.youtube.com/results?search_query=CVPR18
此文鏈接:
https://olgalitech.wordpress.com/2018/06/30/cvpr-2018-recap-notes-and-trends/
-
計算機(jī)視覺
+關(guān)注
關(guān)注
9文章
1708瀏覽量
46737 -
機(jī)器學(xué)習(xí)
+關(guān)注
關(guān)注
66文章
8500瀏覽量
134477 -
論文
+關(guān)注
關(guān)注
1文章
103瀏覽量
15193
原文標(biāo)題:收藏指數(shù)爆表!CVPR 2018-2019幾十篇優(yōu)質(zhì)論文解讀大禮包! | 技術(shù)頭條
文章出處:【微信號:rgznai100,微信公眾號:rgznai100】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
格靈深瞳六篇論文入選ICCV 2025
理想汽車八篇論文入選ICCV 2025
傳音多媒體團(tuán)隊攬獲CVPR NTIRE 2025兩項挑戰(zhàn)賽冠亞軍

后摩智能四篇論文入選三大國際頂會
云知聲四篇論文入選自然語言處理頂會ACL 2025

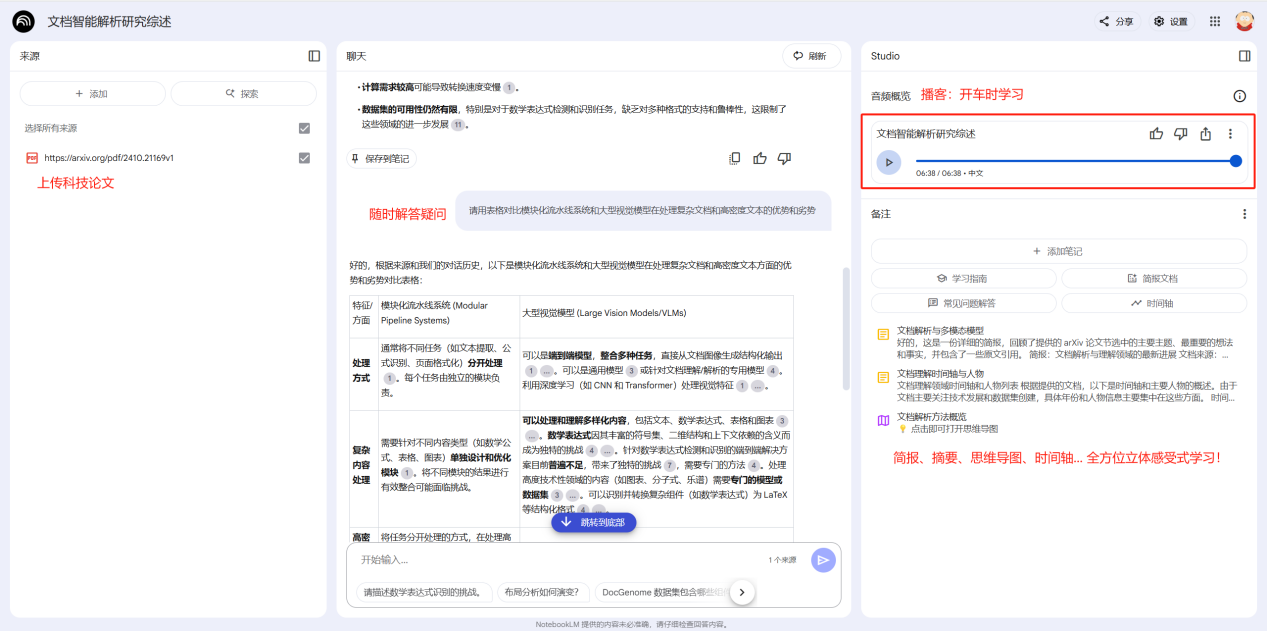
老板必修課:如何用NotebookLM 在上下班路上吃透一篇科技論文?
【「零基礎(chǔ)開發(fā)AI Agent」閱讀體驗】總體預(yù)覽及入門篇
挑戰(zhàn)具身機(jī)器人協(xié)同操作新高度!地瓜機(jī)器人邀你共戰(zhàn)CVPR 2025雙臂協(xié)作機(jī)器人競賽
美報告:中國芯片研究論文全球領(lǐng)先
后摩智能5篇論文入選國際頂會

一文理解多模態(tài)大語言模型——上
NVIDIA視覺生成式AI的最新進(jìn)展
【《大語言模型應(yīng)用指南》閱讀體驗】+ 基礎(chǔ)篇
在多FPGA集群上實現(xiàn)高級并行編程
解讀MIPI A-PHY與車載Serdes芯片技術(shù)與測試






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論