") 分析分布式控制系統(tǒng)在機器人的3C設計中起到的作用
分析分布式控制系統(tǒng)在機器人的3C設計中起到的作用

你可能熟悉阿斯莫夫的機器人三原則,這因在他的許多科幻小說里被提及而出名。不過,你可能沒意識到還有另外三個組織原則(或許嚴格意義上不能叫做原則)—機器人3C原則,它在現代機器人設計中很重要。
軍隊里用的溝通,命令和控制(有時稱其為3C),也是通過分布式要素實現采集、處理和傳播信息的三個關鍵原則,今天用以實現機器人的技術可以認為是把分布式力量要素組合的結果—-雖然主要依賴機械力,不過這些“C”要素也可以應用于機器人分布系統(tǒng)的設計。
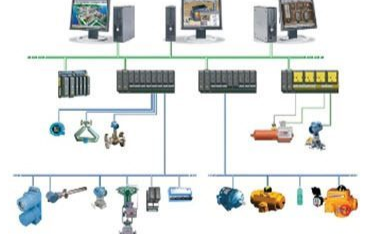
圖二:使用“3C”使控制分散的機器人系統(tǒng)更簡單。(來源:IStockPhoto.com)
1.溝通
溝通大概是一個分布式系統(tǒng)設計中最容易明白的一個元素。用于成像、定位,環(huán)境監(jiān)測,電源和電動機控制(只列舉了一點)的多元素之間需要彼此“交流”并和集中控制器“交流”,集中控制器的作用是管理冰協(xié)調完成一項任務的詳細活動。標準通信接口,有線的或無線的,用于從系統(tǒng)邊緣傳輸信息到中央控制器。當中央控制器需要發(fā)送指令到邊緣元素時,也許會給傳感器發(fā)送指令更新或者增加一個步進馬達,使用同一個接口。微控制器(MCUs)通常是終端節(jié)點內大腦,它們支持各種通信接口以簡化數據傳輸。
通常來說,最小化從邊緣到中央控制器的數據流很方便,因此額外的處理能力經常被移到這些終端節(jié)點。終端節(jié)點獨立處理事情直接省略了中間的數據流。當邊緣設備更加自主,只有關鍵更新或請求任務才會需要主控制器的參與。舉個例子,傳感器數據經常需要進行處理來判斷它是否處在允許的范圍內。如果每次測量結果都被發(fā)送到中央控制器,將會產生巨大的數據流并且要求控制器擁有額外的處理能力。如果傳感器能夠自主完成處理過程,并且只在文本超出知識范圍(或者朝著那個方向)時才報告給控制器,巨大的中央控制器數據帶寬和處理能力就能被節(jié)省。
對于復雜的傳感算法來說,多數據流可能需要被聯(lián)合和處理,來看看中央處理器是否要采取一些行動。舉個例子,同速度距離測量一起的影像信息可能展示一個物體沿著某個運動路線運動。如果這些文本能夠被結合,也許使用一個能控制幾個關鍵邊緣傳感器的分散本地控制器,就能傳送警告給中央控制器,并作出反應。
通常這些復雜的功能要求高級信號處理能力,這甚至在低廉的MCU上就能實現。比如在德州儀器MSP430 MCU家族里,甚至有許多的低廉設備有并聯(lián)和加速功能。這種能力促成了簡單的數字信號處理(DSP)算法,這種算法經常在聯(lián)合多傳感器文本時用到,叫做傳感器融合,為了智能和獨立的運算。許多的MCU提供超高表現的DSP能力,經常用于更復雜的任務比如成像系統(tǒng)。簡單的MAC對大范圍的低水平任務來說足夠了,并且經常顯著提高使用更復雜設備的執(zhí)行效率。
-
傳感器
+關注
關注
2565文章
52930瀏覽量
766783 -
控制器
+關注
關注
114文章
17088瀏覽量
184041 -
機器人
+關注
關注
213文章
29706瀏覽量
212650
發(fā)布評論請先 登錄
基于CAN總線的仿人機器人分布式控制系統(tǒng)
基于虛擬儀器的城市景觀照明分布式控制系統(tǒng)設計與實現
分布式控制系統(tǒng)
空間機器人分布式控制系統(tǒng)
分布式控制系統(tǒng)(DCS)問答
工業(yè)機器人分布式控制系統(tǒng)實例

新型的高壓變頻分布式控制系統(tǒng)
基于分布式控制系統(tǒng)的輪式智能機器人研究

如何設計和實現基于UART的機器人分布式控制通信協(xié)議概述
分布式控制系統(tǒng)的介紹





 工商網監(jiān)
工商網監(jiān)
評論