 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問(wèn)
提問(wèn)  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
Xilinx 最近為其全新的 SoM(模塊上系統(tǒng))芯片組系列發(fā)布了第一款開(kāi)發(fā)板,即Kria KV260 Vision AI Starter 套件。它專為開(kāi)發(fā)高級(jí)視覺(jué)人工智能應(yīng)用程序而設(shè)計(jì)和構(gòu)建,這些應(yīng)用程序需要硬件加速,但不需要開(kāi)發(fā)人員/工程師擁有復(fù)雜的硬件設(shè)計(jì)知識(shí)來(lái)從頭開(kāi)始實(shí)現(xiàn)硬件加速。
我通常會(huì)帶著我得到的任何新的 Xilinx 開(kāi)發(fā)板直接前往 Vivado。然而,Kria KV260 開(kāi)發(fā)板開(kāi)箱即用,以至于我什至沒(méi)有打開(kāi) Vivado,就讓 USB 網(wǎng)絡(luò)攝像頭正常工作,并將視頻流式傳輸回我的主機(jī) PC,并成功使用人臉檢測(cè) AI 應(yīng)用程序識(shí)別任何進(jìn)入框架的面孔。(要充分理解這一點(diǎn),請(qǐng)?jiān)诖颂幉榭?/font>我在過(guò)去的項(xiàng)目中為使用 MicroZed 的網(wǎng)絡(luò)攝像頭付出了多少工作)。
Kria KV260 開(kāi)發(fā)入門(mén)套件隨附安裝在基板上的 Kria SoM,其外圍設(shè)備包括 USB 3.0、以太網(wǎng)、HDMI、PMOD 等。它需要 12V 筒形插孔電源。如果您還沒(méi)有,可以在此處與購(gòu)買入門(mén)套件一起購(gòu)買。還需要 USB 或 MIPI 攝像頭,以及 micro-USB 電纜、以太網(wǎng)電纜和 microSD 卡。
建議使用 HDMI 電纜,但對(duì)于基本的智能相機(jī)應(yīng)用程序不是必需的,因?yàn)榭梢赃x擇通過(guò)實(shí)時(shí)流協(xié)議通過(guò)有線以太網(wǎng)傳輸視頻饋送。Xilinx 還將所有這些物品捆綁在一個(gè)可選附件包中,如果您還沒(méi)有所有物品,可以與 Kria 一起購(gòu)買。
使用 KV260 啟動(dòng)套件映像加載 SD 卡
在Kria KV260 的入門(mén)門(mén)戶上,有一個(gè)鏈接可以專門(mén)下載KV260 的嵌入式 Linux 映像。我專門(mén)針對(duì) KV260 板說(shuō),因?yàn)?Kria SoM 本身可以安裝在其他底板上,但 KV260 是 Kria SoM 與這個(gè)特定底板的組合。由于 Linux 中的設(shè)備樹(shù)期望在此基板上實(shí)時(shí)看到的大多數(shù)外圍設(shè)備,Linux 映像在具有不同基板的 Kria 上將無(wú)法正常工作。
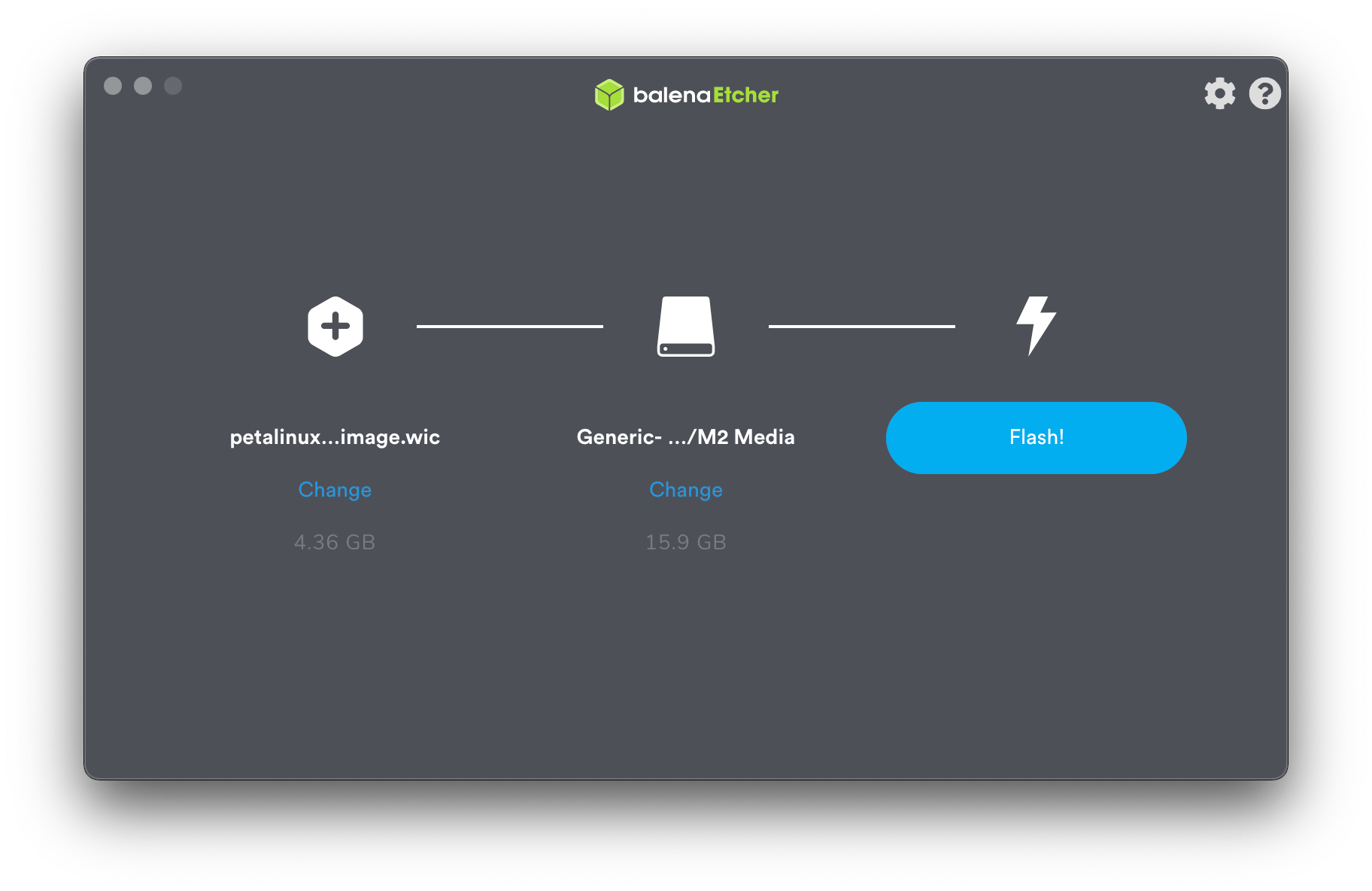
下載 Linux 映像并使用 balenaEtcher 之類的映像工具將其編程到至少 16GB 大小的 10 類 SD 卡上。我在 Kria 的基本附件包中收到的 SD 卡是空白的,請(qǐng)注意那些也購(gòu)買了基本附件包的人。
連接一切
對(duì) SD 卡進(jìn)行映像后,將其安裝在位于底板頂部的 SD 卡插槽中。連接微型 USB 電纜、以太網(wǎng)電纜和相機(jī)。我正在使用 Logitech Brio 網(wǎng)絡(luò)攝像頭,因此我將它連接到 KV260 上的四個(gè) USB 3.0 端口之一。
有兩個(gè)選項(xiàng)可以查看來(lái)自連接到 KV260 的攝像機(jī)的視頻流:通過(guò) HDMI 電纜在外接顯示器上,或在主機(jī) PC 上使用能夠處理RTSP源的媒體播放器,例如通過(guò)以太網(wǎng)電纜處理VLC或ffplay . 我個(gè)人選擇通過(guò)以太網(wǎng)路由進(jìn)行 RTSP 饋送,因?yàn)槲业娘@示器是 USB C 并且我不想使用適配器處理潛在的轉(zhuǎn)換問(wèn)題,因?yàn)檫@仍然是驅(qū)動(dòng)它的嵌入式 Linux 映像。
將微型 USB 連接到主機(jī) PC,將以太網(wǎng)連接到路由器/調(diào)制解調(diào)器,但暫時(shí)斷開(kāi)筒形插孔電源線。
打開(kāi) COM 端口和上電板
將 micro-USB 電纜連接到主機(jī) PC 后,至少會(huì)出現(xiàn)兩個(gè)枚舉的串行端口。編號(hào)較低的 COM 端口是與 KV260 的 UART 相關(guān)聯(lián)的端口,用于連接選擇的串行終端(例如 TeraTerm、Putty、Serial 等)。
我個(gè)人有四個(gè) COM 端口出現(xiàn)在我的計(jì)算機(jī)上(我在我的機(jī)器的 Mac OS 端運(yùn)行),而編號(hào)第二低的一個(gè)最終是 KV260 的 UART。
使用波特率 115200 的串行終端打開(kāi) COM 端口,然后通過(guò)將電源連接到筒形插孔來(lái)打開(kāi) KV260。

第一次啟動(dòng) KV260 的 Linux 映像時(shí),它會(huì)要求您設(shè)置自己的密碼。用戶名已設(shè)置為petalinux 。
連接到互聯(lián)網(wǎng)
隨著 Kria SoM 的推出,其他令人興奮的事情之一是 Xilinx 推出了第一個(gè)嵌入式應(yīng)用商店。用于驅(qū)動(dòng)帶有面部識(shí)別算法的 USB 網(wǎng)絡(luò)攝像頭的 Smart Camera 加速應(yīng)用程序可在 Xilinx 的嵌入式應(yīng)用商店免費(fèi)獲得,并且 KV260 需要連接到互聯(lián)網(wǎng)才能下載。
將 KV260 連接到 Internet 的最簡(jiǎn)單方法是將以太網(wǎng)電纜插入路由器/調(diào)制解調(diào)器,Linux 映像將使用 DHCP 為自己分配 IP 地址。
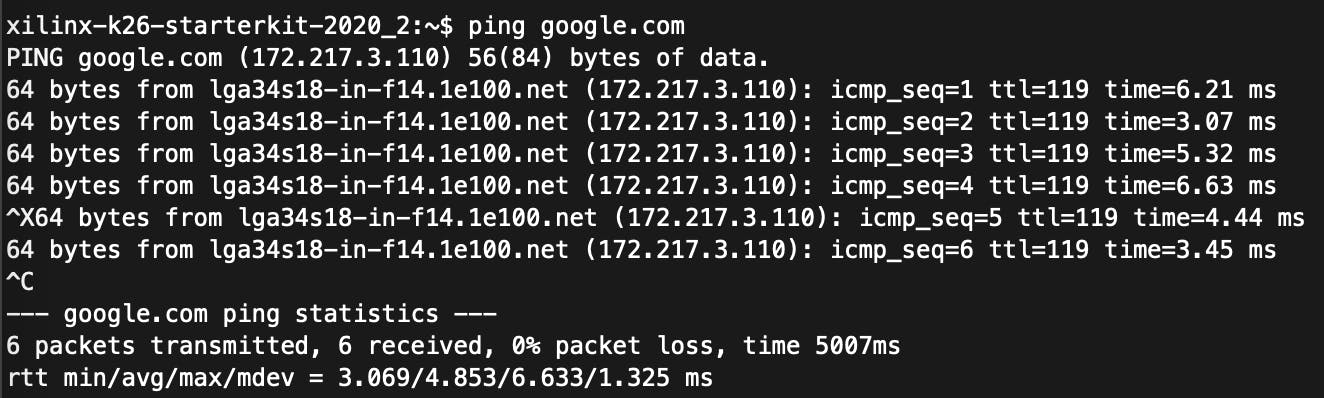
通過(guò)對(duì)google.com的簡(jiǎn)單 ping 驗(yàn)證互聯(lián)網(wǎng)連接
root@xilinx-k26-starterkit-2020_2:~# ping google.com
從 Xilinx 嵌入式應(yīng)用商店下載智能相機(jī)應(yīng)用
Xilinx 還開(kāi)發(fā)了自己的平臺(tái)管理實(shí)用程序xmutil來(lái)處理加速的應(yīng)用程序包/文件。因此,從 Embedded App Store 下載新應(yīng)用程序到在 Linux 映像中將它們切換出來(lái),大多數(shù)事情都是使用xmutil命令完成的。
查看 Xilinx 嵌入式應(yīng)用商店中可用的加速應(yīng)用列表(僅顯示免費(fèi)應(yīng)用,付費(fèi)應(yīng)用必須直接下載)。
root@xilinx-k26-starterkit-2020_2:~# sudo xmutil getpkgs

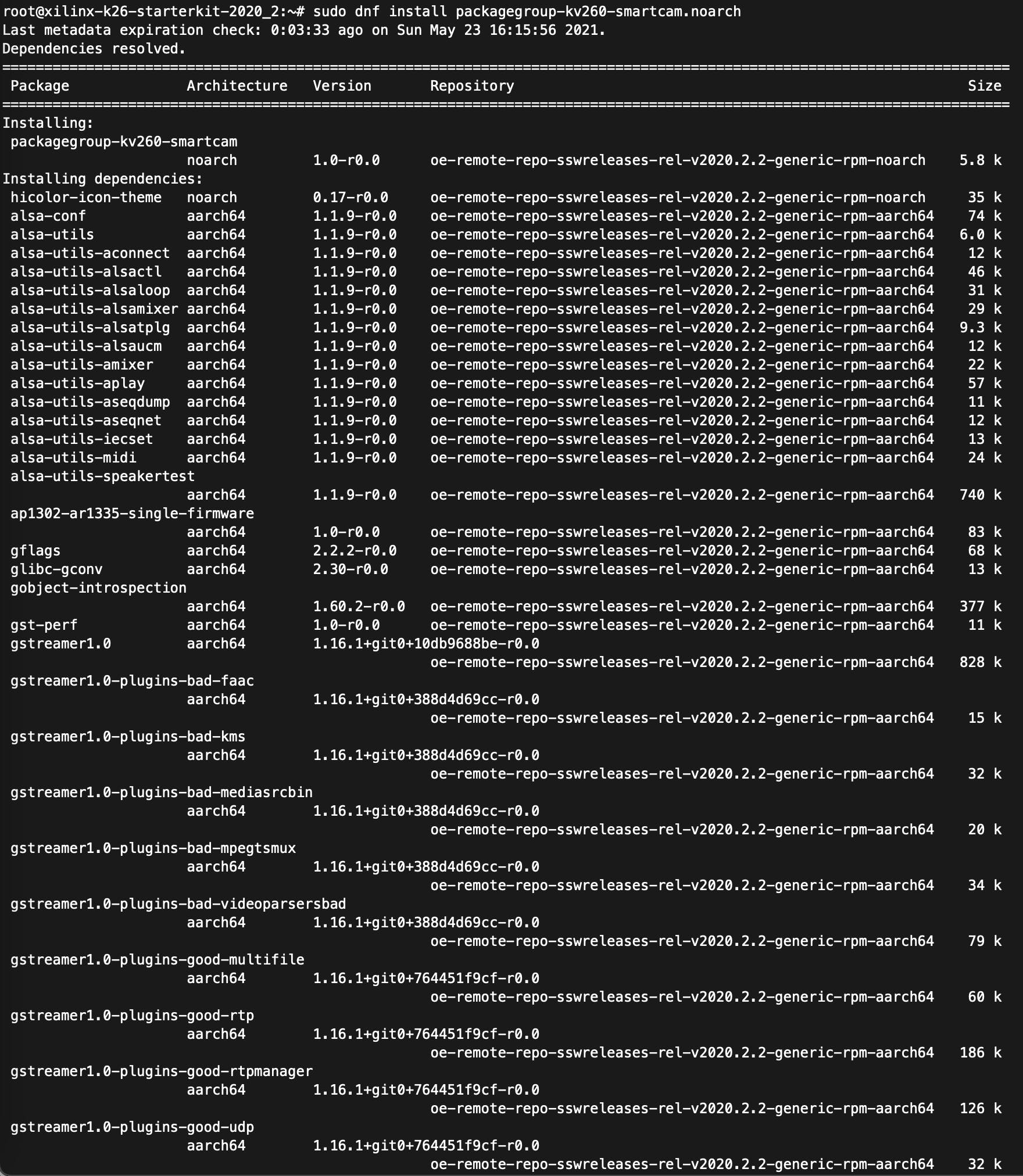
目前,嵌入式應(yīng)用商店提供三款免費(fèi)的加速 AI 視覺(jué)應(yīng)用。使用dnf命令下載并安裝 Smart Camera 加速應(yīng)用程序。KV260 的 Linux 映像配置為使其鏡像已指向 Embedded App Store。
root@xilinx-k26-starterkit-2020_2:~# sudo dnf install packagegroup-kv260-smartcam.noarch
這部分可能需要幾分鐘,具體取決于您的互聯(lián)網(wǎng)速度。
加載智能相機(jī)加速應(yīng)用
雖然可以安裝多個(gè)應(yīng)用程序,但一次只能在 KV260 上運(yùn)行一個(gè)加速應(yīng)用程序。這是xmutil用來(lái)處理諸如檢查當(dāng)前加載哪個(gè)應(yīng)用程序以運(yùn)行并將它們切換出來(lái)之類的事情的地方。
root@xilinx-k26-starterkit-2020_2:~# sudo xmutil listapps
listapps選項(xiàng)顯示當(dāng)前安裝在Kria上的所有應(yīng)用程序,并顯示當(dāng)前處于活動(dòng)狀態(tài)的應(yīng)用程序(即當(dāng)前加載的應(yīng)用程序)。

使用unloadapp選項(xiàng)卸載默認(rèn)的 kv260-dp 應(yīng)用程序:
root@xilinx-k26-starterkit-2020_2:~# sudo xmutil unloadapp
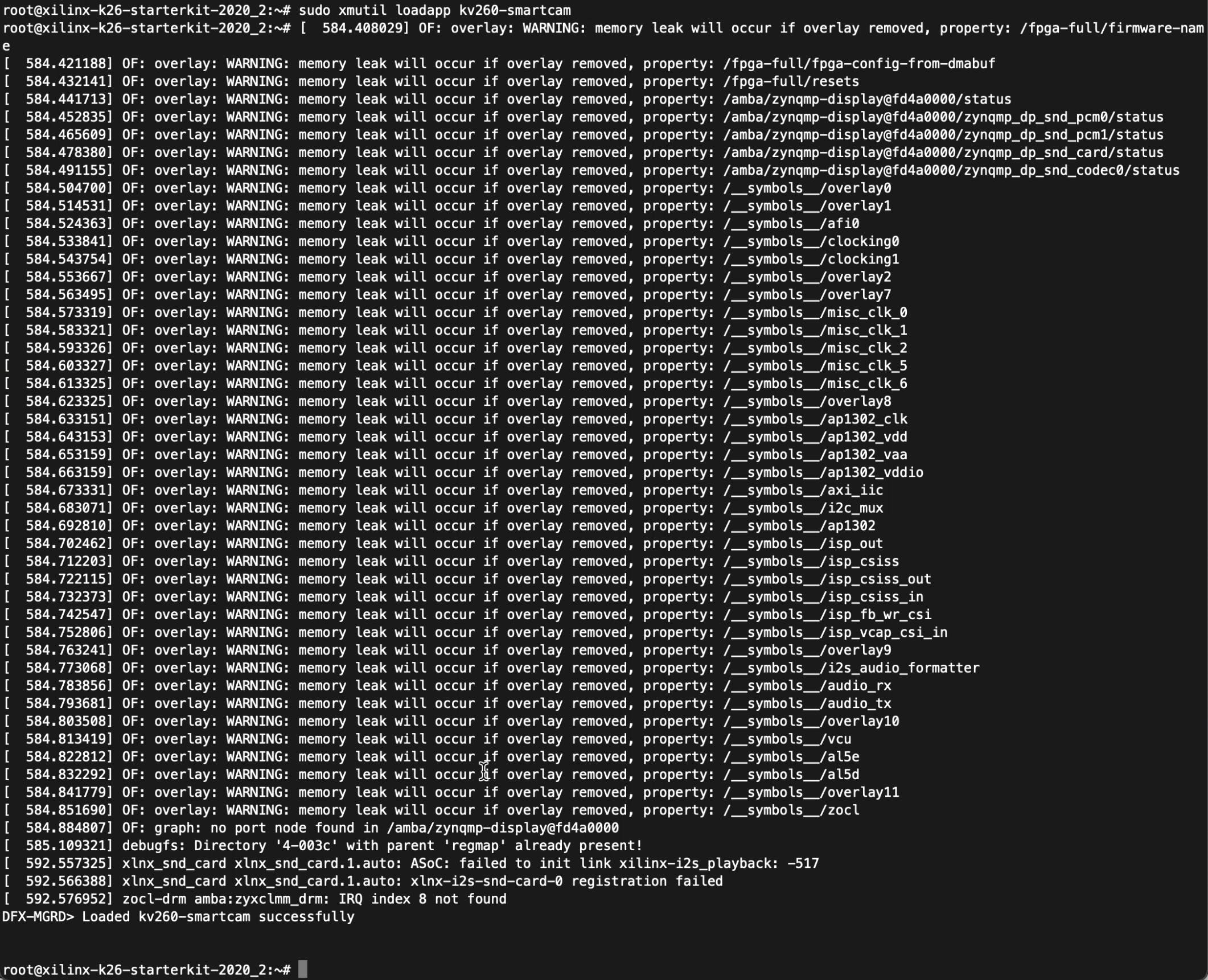
并使用loadapp選項(xiàng)加載 Smart Camera 應(yīng)用程序:
root@xilinx-k26-starterkit-2020_2:~# sudo xmutil loadapp kv260-smartcam
一旦顯示 Smart Camera 應(yīng)用程序已成功加載的行出現(xiàn),請(qǐng)按 Enter 以返回命令行。
運(yùn)行智能相機(jī)加速應(yīng)用程序
每個(gè)加速應(yīng)用程序都有自己的一組命令來(lái)控制它,這些命令將在應(yīng)用程序安裝和加載后可用。Smart Camera 應(yīng)用程序由smartcam命令控制。
運(yùn)行以有線以太網(wǎng)連接為目標(biāo)的智能相機(jī)應(yīng)用程序并指定網(wǎng)絡(luò)攝像頭的 USB 設(shè)備編號(hào)(如果通過(guò) MIPI 連接器使用相機(jī),則使用 --mipi 標(biāo)志而不是 --usb 標(biāo)志)。
root@xilinx-k26-starterkit-2020_2:~# sudo smartcam --usb 0 -W 1920 -H 1080 -r 30 --target rtsp
在 --target 標(biāo)志之后傳遞的 rtsp 選項(xiàng)告訴智能相機(jī)應(yīng)用程序通過(guò)以太網(wǎng)電纜發(fā)送視頻饋送,如果您使用帶有 HDMI 電纜的外接顯示器,請(qǐng)傳遞 dp 和目標(biāo)選項(xiàng)。
root@xilinx-k26-starterkit-2020_2:~# sudo smartcam --usb 0 -W 1920 -H 1080 -r 30 --target dp
當(dāng)使用以太網(wǎng)流式傳輸視頻源時(shí),智能相機(jī)應(yīng)用程序?qū)⑼ㄟ^(guò) UART 回顯的第一件事是 RTSP 源的 IP 地址、端口號(hào)和通道名稱。

設(shè)置 VLC 以查看視頻流
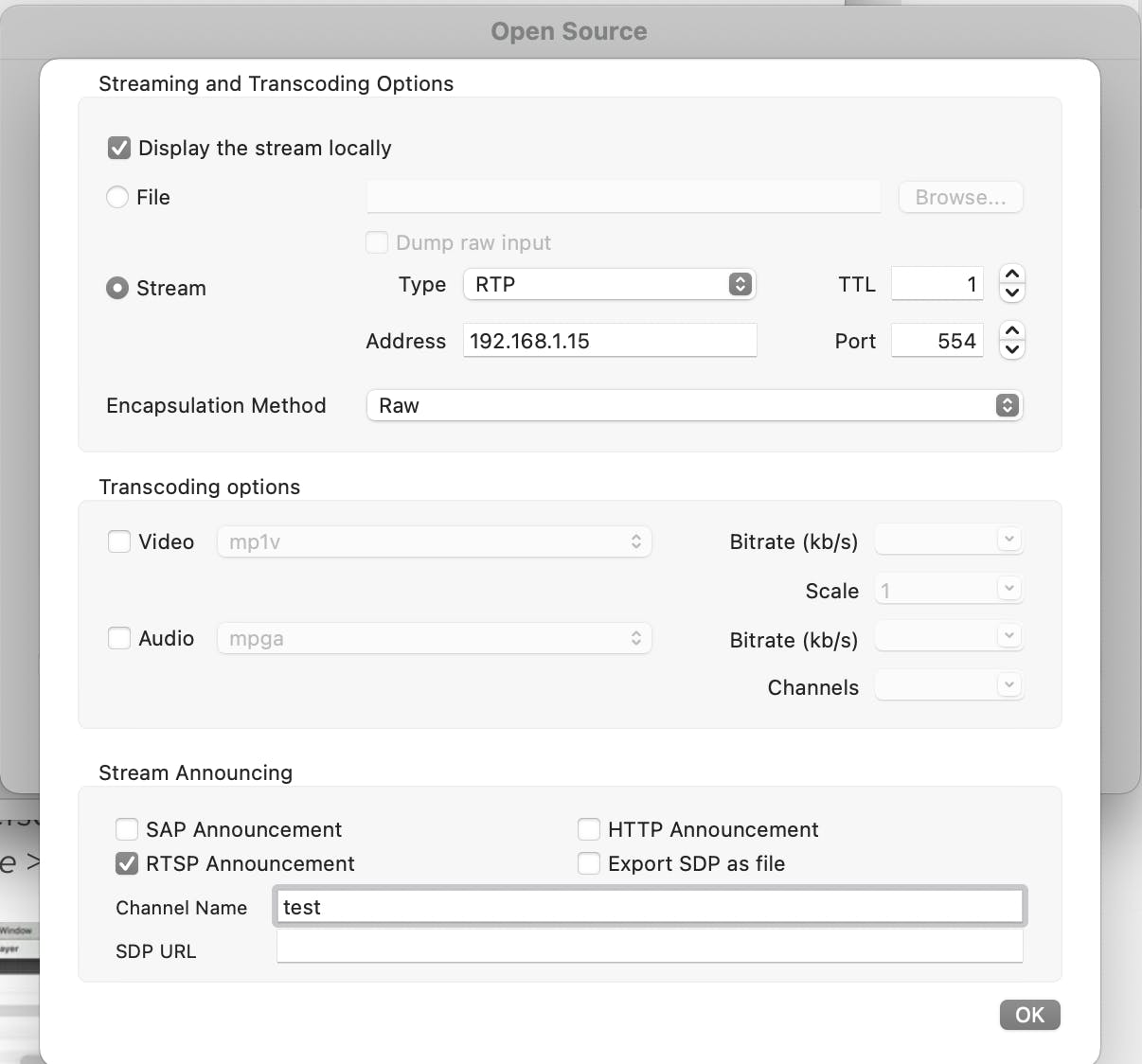
要查看 RTSP 提要,我個(gè)人選擇使用 VLC 播放器。設(shè)置 VLC 播放器以查看流,方法是轉(zhuǎn)到文件>打開(kāi)網(wǎng)絡(luò)...選中流輸出框:然后單擊其右側(cè)的設(shè)置...按鈕。
配置 feed 流并在本地顯示流(播放流時(shí)會(huì)自動(dòng)彈出視頻 feed 窗口)。使用從 Smart Camera 應(yīng)用程序輸出到 UART 的 IP 地址、端口號(hào)和通道名稱來(lái)配置 VLC 中的流,如下所示:
通過(guò)從播放列表中選擇流并單擊播放按鈕來(lái)查看視頻流。有時(shí)我確實(shí)必須在視頻源窗口彈出之前單擊播放幾次,但一旦這樣做,它就會(huì)立即識(shí)別幀中的任何面孔。
下一步
讓 KV260 在攝像頭和 AI 視覺(jué)應(yīng)用程序運(yùn)行的情況下輕松啟動(dòng)并運(yùn)行,我感到非常興奮。我目前正計(jì)劃使用 KV260 使用實(shí)時(shí)網(wǎng)絡(luò)攝像頭項(xiàng)目重新訪問(wèn)我的咖啡店數(shù)字菜單。我想看看我如何通過(guò)使用對(duì)象檢測(cè)來(lái)識(shí)別某些糕點(diǎn)何時(shí)用完并將它們從鏈接到二維碼的數(shù)字菜單中刪除來(lái)改進(jìn)該項(xiàng)目。
?
?
- Kria KV260視覺(jué)AI入門(mén)套件用戶指南
- Kria KR260機(jī)器人入門(mén)套件:通過(guò)硬件加速釋放機(jī)器人
- 適用于AWS IoT Greengrass的Xilinx KV260入門(mén)指南
- Kria K26 SOM:邊緣視覺(jué)AI的理想平臺(tái)
- 創(chuàng)建自定義Kria KV260加速M(fèi)L應(yīng)用程序
- 使用KV260進(jìn)行事故檢測(cè)
- 使用Xilinx KV260對(duì)智能家居設(shè)備進(jìn)行手勢(shì)控制
- Vitis ai 1.4 KV260鏡像開(kāi)源
- 在KV260上運(yùn)行Yolov4 tiny
- Xilinx KV260 Vitis-AI 1.4人臉檢測(cè)
- 為Kria KV260添加USB WiFi
- Xilinx Kria KV260套件的第一個(gè)硬件項(xiàng)目
- Vivado 2021.1中的Kria KV260入門(mén)
- 使用Xilinx Kria KV260進(jìn)行AI火災(zāi)探測(cè)
- Kria KV260上的動(dòng)態(tài)交通燈系統(tǒng)
- AMD Kria KR260 DPU配置教程3 2139次閱讀
- AMD Kria KR260 DPU配置教程2 2799次閱讀
- AMD Kria KR260 DPU配置教程 1142次閱讀
- 基于聆思CSK6視覺(jué)AI開(kāi)發(fā)套件實(shí)現(xiàn)剪子包袱錘游戲 1270次閱讀
- 如何在KV260上快速體驗(yàn)Vitsi AI圖像分類示例程序 1664次閱讀
- 在u-boot中使用ethernet的方法 3997次閱讀
- 如何在LiDAR點(diǎn)云上進(jìn)行3D對(duì)象檢測(cè) 2210次閱讀
- 一文讓你搞懂機(jī)器視覺(jué)入門(mén)基礎(chǔ)知識(shí) 7080次閱讀
- 基于AI視覺(jué)處理的更多新應(yīng)用 2010次閱讀
- dfrobot拿鐵熊貓 入門(mén)傳感器套件簡(jiǎn)介 7870次閱讀
- dfrobotmicro:bit造物粒子入門(mén)套件簡(jiǎn)介 4402次閱讀
- dfrobot 編程積木入門(mén)版學(xué)習(xí)套件簡(jiǎn)介 2391次閱讀
- 淺談人工智能物聯(lián)網(wǎng)設(shè)計(jì)的AIoT開(kāi)發(fā)套件特點(diǎn)及參數(shù) 4742次閱讀
- 基于人工智能方向的AI開(kāi)發(fā)套件——CES-AI75 3082次閱讀
- 計(jì)算機(jī)視覺(jué)教學(xué)的內(nèi)容有哪些? 3686次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊(cè)
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評(píng)估板參考手冊(cè)
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來(lái)的未來(lái)-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開(kāi)發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊(cè)
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開(kāi)關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊(cè)免費(fèi)下載(新編第二版pdf電子書(shū))
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德?tīng)栔?/a>
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論