好的,我們來詳細解釋一下二相步進電機驅動電路及其原理圖。
什么是二相步進電機驅動電路?
二相步進電機驅動電路是一種電子系統,它接收來自控制器(如微控制器或運動控制卡)發出的低功率數字信號(步進脈沖和方向信號),并將其轉換和放大成足夠的功率(電壓和電流)以及精確的電平切換順序,來驅動二相步進電機的兩相繞組(通常稱為A和B相),從而使電機轉子按照控制信號的指令精確地旋轉步進角度或保持位置。
簡單來說,它充當控制器和電機本身之間的“翻譯”和“動力放大器”。控制器說“走一步”或“反轉”,驅動電路就指揮電機完成這個動作。
二相步進電機驅動電路原理圖解析
一個典型的二相步進電機驅動電路主要由以下幾個功能模塊組成。下面結合一個基于集成驅動器IC(如A4988、DRV8825、TMC2208等)的簡化原理圖進行解析:
 (請注意:此圖非常簡化,實際電路會根據具體驅動器IC有所不同,但核心概念一致)
(請注意:此圖非常簡化,實際電路會根據具體驅動器IC有所不同,但核心概念一致)
核心模塊解析
-
控制器 (Microcontroller/MCU):
- 作用: 整個系統的“大腦”。它決定何時走多少步、以什么速度(頻率)、向哪個方向旋轉。
- 連接: 通常輸出STEP (PUL)脈沖信號(每個上升沿觸發電機移動一步)和DIR (DIR)方向信號(高電平/低電平決定正轉或反轉)。還可能輸出ENABLE信號(低電平有效,用于禁用驅動器輸出,使電機自由)。
- 原理圖標示: 通常畫為一個小方塊,引出
STEP,DIR,ENABLE,GND等引腳線。
-
驅動芯片模塊 (Driver IC):
- 作用: 這是電路的核心部件。它將控制器發出的簡單指令(步、方向、使能)解碼,并生成精確的、時序控制下的高功率邏輯信號,這些信號直接控制后續功率開關器件的狀態。
- 關鍵功能:
- 脈沖解碼與順序控制: 接收STEP脈沖,并根據DIR狀態,按照預先設定好的步進時序模式(例如:整步、半步、1/4微步等)控制內部邏輯。
- 電流控制: 這是驅動器IC最重要的功能之一。它通過PWM(脈寬調制) 技術來主動限制并精確控制流入電機繞組(A和B)的峰值電流。
- 原理: IC會通過檢測外部功率MOSFET Source極(源極)和GND之間串聯的電流檢測電阻 (Rsense)上的壓降(
Vref = Ipeak * Rsense)來實時監控相電流。當電流達到設定值(由Vref電壓決定)時,IC內部的比較器會觸發,驅動IC會快速暫時關閉對應的MOSFET,阻止電流繼續上升。當電流降低到一定程度后,重新打開MOSFET。 - Vref設定: 用戶通常通過一個外部精密可調電阻 (電位器) + 分壓電阻網絡產生一個參考電壓(
Vref)連接到驅動器IC的VREF(或I_SET) 引腳。Vref值直接決定了IC所允許的最大峰值電流(Ipeak = Vref / (Rsense * Gain),其中Gain由IC內部設定,常為5或8)。
- 原理: IC會通過檢測外部功率MOSFET Source極(源極)和GND之間串聯的電流檢測電阻 (Rsense)上的壓降(
- 微步控制: 高級驅動器支持微步驅動。通過調整內部DAC(數模轉換器)輸出,使每相的PWM占空比精細變化,從而讓相電流在+
Ipeak, 0, -Ipeak之間連續變化,模擬出近似的正弦波電流(每個方框代表一次整步的電流波形)。通過MS1、MS2、MS3等引腳的高低電平組合來選擇微步模式(如1/2, 1/4, 1/8, 1/16等)。微步大大提高了電機運行的平滑度和定位分辨率。 - 過溫/過流保護: IC內部通常集成溫度傳感器和過流檢測電路。在過熱或過流時(如電機堵轉),會自動關閉功率輸出并可能通過
FAULT引腳通知控制器。 - H橋邏輯輸出: IC內部邏輯最終輸出4路控制信號(如
AIN1,AIN2控制A相,BIN1,BIN2控制B相)給功率級。每一路信號控制功率級中H橋的一個MOSFET。
- 連接: 接收
STEP,DIR,ENABLE,VREF。輸出1A,2A,1B,2B(或類似名稱)控制4個MOSFET。有VMOT(主電源),GND,邏輯電源VDD(通常接控制器電源3.3V/5V),Rsense引腳連接電流檢測電阻兩端,MSx引腳用于微步選擇。 - 原理圖標示: 圖中核心的芯片部分。引出了
STEP,DIR,EN,VREF等輸入信號線到外部MCU和電位器,以及1A,2A,1B,2B輸出信號線連接到后續的功率級MOSFET。
-
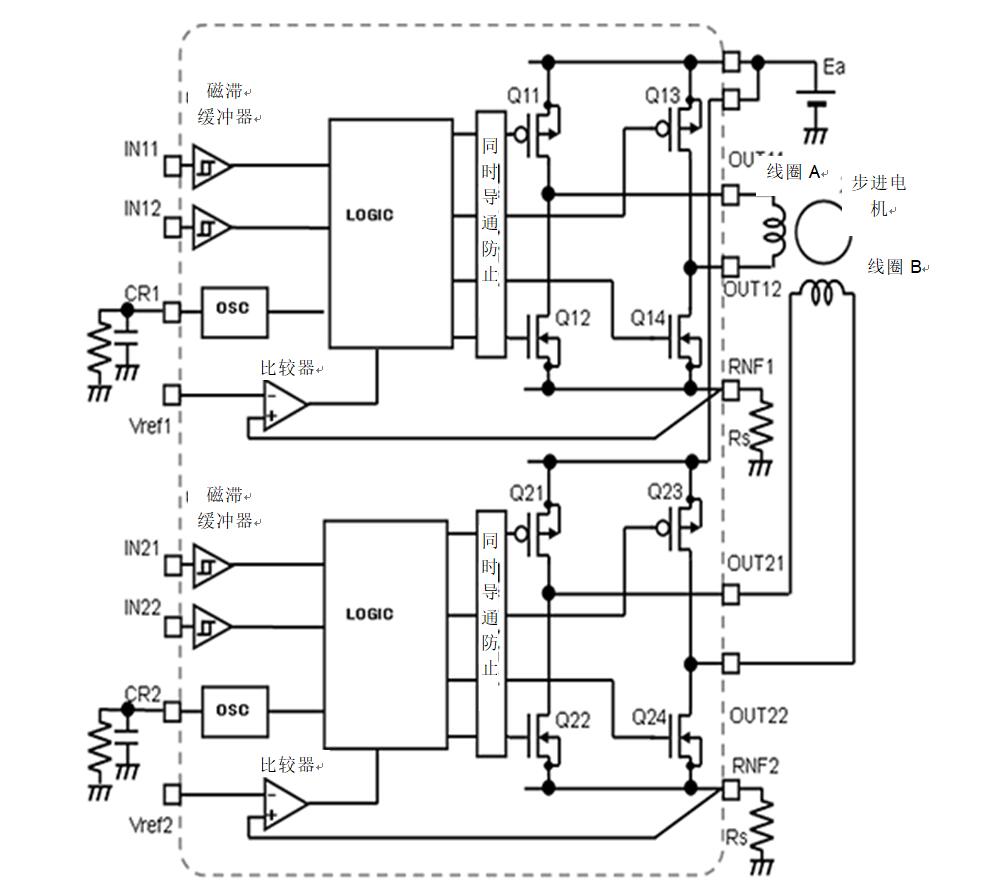
功率開關級 (Power MOSFET H-Bridge):
- 作用: 接收來自驅動芯片的4路控制信號,并執行實際的開關動作,將主電源 (VMOT) 的高電壓、大電流以正確的方向接入A相繞組和B相繞組。每個相位需要1個完整的H橋電路。
- 核心結構 (單個H橋):
- 由4個功率MOSFET(場效應管)構成,組成一個H形拓撲:
- 左上方臂:Q1 (常為P型MOSFET或N型) - 控制電流“流入”繞組上端 (
1A) - 左下方臂:Q2 (通常為N型MOSFET) - 控制電流“流出”繞組上端 (
2A) - 右上方臂:Q3 (控制繞組下端
1B) - 右下方臂:Q4 (控制繞組下端
2B)
- 左上方臂:Q1 (常為P型MOSFET或N型) - 控制電流“流入”繞組上端 (
- 繞組連接在H橋的左右兩個橋臂之間(如
1A和2A之間)。
- 由4個功率MOSFET(場效應管)構成,組成一個H形拓撲:
- 工作原理 (以電機A相為例):
- 正向電流 (順時針): 開啟 Q1 和 Q4,關閉 Q2 和 Q3。電流路徑:
VMOT -> Q1 -> 繞組 (A+, A-) -> Q4 -> RSENSE -> GND。 - 反向電流 (逆時針): 開啟 Q2 和 Q3,關閉 Q1 和 Q4。電流路徑:
VMOT -> Q3 -> 繞組 (A-, A+) -> Q2 -> RSENSE -> GND。 - 自由輪續流 (Freewheeling/Decay):
- 當MOSFET關閉瞬間,繞組的電感會試圖維持電流。此時,續流二極管 (通常集成在MOSFET內部,即體二極管,圖中沒有單獨畫出) 或外部并聯的肖特基二極管會提供回路,讓電流繼續流動消耗存儲在磁場中的能量,防止產生破壞性的高電壓(
L di/dt)。驅動器IC會根據設定的衰減模式主動控制哪對MOSFET短暫開啟以加快電流衰減(快衰減)或減慢衰減(慢衰減)。
- 當MOSFET關閉瞬間,繞組的電感會試圖維持電流。此時,續流二極管 (通常集成在MOSFET內部,即體二極管,圖中沒有單獨畫出) 或外部并聯的肖特基二極管會提供回路,讓電流繼續流動消耗存儲在磁場中的能量,防止產生破壞性的高電壓(
- 關斷狀態: 四個MOSFET都關閉,繞組與電源斷開。
- 正向電流 (順時針): 開啟 Q1 和 Q4,關閉 Q2 和 Q3。電流路徑:
- 驅動電流流向:
1A/2A信號驅動構成A相H橋的4個MOSFET;1B/2B信號驅動構成B相H橋的4個MOSFET。 - 原理圖標示: 在驅動IC下方,
VMOT(通常24V/36V/48V) 連接到H橋頂端的公共點(P-MOS的S極或高側驅動器)。每個MOSFET柵極(G)連接到驅動IC的對應輸出引腳 (1A,2A,1B,2B)。繞組連接在H橋的兩個橋臂中點之間。MOSFET的源極(S)接地端連接電流檢測電阻RSENSE然后到GND。
-
電源與濾波網絡 (Power Supply & Filtering):
- VMOT: 給H橋和電機供電的高電壓大電流主電源(如24V, 36V, 48V)。容量要足夠。
- VDD/Logic VCC: 給控制器和驅動器IC內部邏輯電路供電的電源(通常5V或3.3V)。
- 電容 (C_Bulk, C_Bypass):
- 大容量電解電容 (C_Bulk): 并聯在
VMOT和GND之間,靠近驅動器IC和功率級。主要作用是提供短時峰值電流(MOSFET開通瞬間需要大電流),吸收電機繞組續流時的反向電動勢能量,平緩電源波動。容量通常是100uF到1000uF或更大。 - 陶瓷電容 / 小容量電容 (C_Bypass): 并聯在
VMOT-GND靠近IC引腳處,及并聯在VDD-GNDIC引腳處。主要作用是濾除高頻開關噪聲。容量通常在0.1uF - 10uF。
- 大容量電解電容 (C_Bulk): 并聯在
-
電流檢測電阻 (RSense):
- 作用: 將流過繞組的電流轉化為一個微小的、可測量的電壓降信號 (
V_sense)。這個信號反饋給驅動器IC的電流檢測端(如SENSE引腳)。 - 原理: 根據歐姆定律,
V_sense = I_phase * RSense。 - 要求: 功率承受能力強(至少1W或更高,取決于電流大小),低電感,高精度(1%或更低),阻值很小(通常0.05Ω到0.3Ω)。
- 原理圖標示: 一個電阻,串聯在所有功率MOSFET的低端與
GND之間。電阻兩端連接到驅動器IC的SENSE(或RS+,RS-) 引腳。
- 作用: 將流過繞組的電流轉化為一個微小的、可測量的電壓降信號 (
-
微步選擇設置 (Microstep Configuration):
- 作用: 通過配置驅動器IC上的
MS1,MS2(有時還有MS3) 引腳的電平(高或低),來選擇所需的微步分辨率(如全步、1/2步、1/4步、1/8步、1/16步)。 - 原理圖標示:
MS1,MS2,MS3引腳會連接到固定的邏輯電平(VDD或GND),或者連接到控制器的GPIO引腳以動態切換。
- 作用: 通過配置驅動器IC上的
總結驅動過程
- 指令接收: 控制器(MCU)根據程序指令,產生低電平的
EN、高/低電平的DIR和脈沖信號的STEP。 - 解碼與電流設定: 驅動器IC接收這些信號。
EN決定是否啟用輸出。DIR決定旋轉方向。STEP的每個上升沿觸發一次步進動作,內部邏輯根據方向和當前微步模式,確定下一步應給A相和B相設定的目標電流大小和方向。 - PWM電流控制:
- IC根據
VREF設定的電流值(Ipeak),驅動內部PWM控制邏輯。 - IC輸出
1A/2A信號驅動A相H橋的4個MOSFET(Q1-Q4)。同時輸出1B/2B信號驅動B相H橋的4個MOSFET(Q1-Q4)。 - 電流流過A相和B相繞組。
RSense產生反饋電壓V_sense。 - 驅動器IC持續比較
V_sense與內部設定的電流門限。當電流即將超過Ipeak時,IC會暫時關閉對應相位的輸出MOSFET(稱為斬波斬波)。當電流下降到某個下限值時,再次開啟MOSFET(PWM模式)。這種快速開關實現了恒流控制。
- IC根據
- 繞組勵磁與步進: 精確控制的兩相電流按設定的序列變化(如兩相正弦波電流的90度相位差),在電機氣隙中產生旋轉的合成磁場,吸引轉子(帶永磁體)轉動一個步進角或微步角度。
- 保護: 如檢測到持續過流或溫度過高,驅動器IC會自動關閉功率輸出(斷開MOSFET)并可能報告錯誤狀態。
關鍵點: 二相步進電機驅動電路的核心在于驅動芯片的智能電流控制功能和精確的時序生成能力,以及H橋功率級的執行能力。微步技術極大地提升了電機運動的平滑性和精度。
兩相雙極步進電機的驅動 其2

在上一篇文章“兩相雙極步進電機的驅動 其1”中,給出了兩相雙極步進電機的基本驅動電路示例和驅動波形。此次“兩相雙極步進電機的驅動 其2”篇,將介紹驅動兩相雙極步進電機過程中電流再生時的Decay:電流衰減。
2023-02-24 09:51:11

兩相單極步進電機的驅動電路
繼上一篇“兩相雙極步進電機的驅動”之后,本文將從兩相單極步進電機的驅動電路,兩相單極步進電機的兩相勵磁PWM驅動波形兩個方面來介紹“兩相單極步進電機的驅動”。如欲了解有關雙極步進電機和單極步進電機之間差異的更多信息,請參考這里。
2023-02-24 09:51:11
如何調整二相步進電機的步進角度,控制步進角度的功能?
在當今的自動化設備中,二相步進電機作為一種常見的驅動元件,其精確控制步進角度的功能尤為重要。那么,博揚智能如何調整二相步進電機的步進角度呢?
2024-03-25 17:49:58
二相步進電機與三相步進電機的區別
步進電機主要是依相數來做分類的,通常我們常見的有四相、二相、三相等幾類。 ? ? ? ? ?二相步進電機與三相步進電機的區別: 電機的相數 是指電機內部的線圈數不同,二相步進電機電機內部是由2個線圈
2021-07-20 14:32:16
分享六種步進電機驅動電路
BYG通用系列二相步進電機最常采用的單極性和雙極性2種驅動電路的設計方案。從原理上體現了二相步進電機的控制方法,增加了步進電機驅動電路設計的靈活性。二相步進電機的單極性和雙極性2種驅動電路設計都采用
2023-01-15 17:17:25
步進電機驅動原理圖
步進電機驅動原理圖,從步進電機的轉動原理可以得出,要使步進電機正常運行,必須按規律控制步進電機的每一相繞組得電。步進驅動器接收外部的信號是方向信號(DIR)和脈沖信號(CP)。另外步進電機在停止
![]() snandi
2021-07-12 07:41:21
snandi
2021-07-12 07:41:21
MC33991二相步進電機驅動集成電路相關資料下載
MC33991是Motorola(摩托羅拉半導體)生產的二相步進電機驅動集成電路。它是雙列貼片24腳封裝。通過SPI(同步串行外設接口)進行通信、可同時控制二個步進電機的驅動電路。該電路由4個可驅動
![]() 小香干
2021-05-20 06:38:01
小香干
2021-05-20 06:38:01
二相四拍步進電機控制驅動器電路BL5607電子資料
概述:BL5607二相四拍步進電機驅動器電路,是在BL5606 電路基礎上根據用戶新的使用要求而重新設計的復費率電動計度器步進電機控制驅動專用集成電路。BL5607采用雙列貼片18腳封裝。
![]() 遠風
2021-04-14 07:08:08
遠風
2021-04-14 07:08:08
六種常見步進電機驅動電路
推薦課程:張飛軟硬開源:基于STM32的BLDC直流無刷電機驅動器(視頻+硬件)http://url.elecfans.com/u/73ad899cfd步進電機驅動電路圖一:二相步進電機驅動電路
![]() 王小琳子
2019-06-24 06:30:00
王小琳子
2019-06-24 06:30:00
步進電機的相數是什么意思
步進電機的相數:是指電機內部的線圈組數,目前常用的有二相、三相、四相、五相步進電機。電機相數不同,其步距角也不同,一般二相電機的步距角為0.9°/1.8°、三相的為0.75°/1.5°、五相的為
![]() 南海姑娘
2021-08-31 07:17:50
南海姑娘
2021-08-31 07:17:50
ULN2003A驅動步進電機的原理圖
,VCE最高達到50V; 如下圖是全部的封裝 ULN2003A驅動步進電機原理圖 以四相八拍步進電機為例,該步進電機為四相步進電機,采用直流電源供電,只要對步進電機的各相繞組按合適
![]() 一只耳朵怪
2021-01-13 16:26:06
一只耳朵怪
2021-01-13 16:26:06
驅動電壓和電壓調節是二相步進電機的精準性能策劃

二相步進電機的工作原理基于電流在兩個相位之間切換,從而產生旋轉的磁場,驅動電機轉動。因此,驅動電壓對電機的性能起著決定性的影響。驅動電壓的高低不僅決定了電機的轉速,還影響到其轉矩、噪聲和發熱等。
2024-03-25 18:31:50
如何去使用兩相四線步進電機?
初入手步進電機,摸索了一段時間,搞明白了怎么使用。下面我以兩相四線為例。第一,找到AB相。如下圖所示:此時也可以用萬用表二極管檔測試,得出AB相。第二,連接驅動器。黑綠和紅藍互換位置也是可以的。按上圖解法即可實現控制。...
![]() 黃色的小金橘
2021-07-07 07:33:46
黃色的小金橘
2021-07-07 07:33:46
兩相步進電機和配套的兩相步進電機驅動器比較
。比較常用的就是兩相步進電機和配套的兩相步進電機驅動器。 首先來看看步進電機,看下面的圖,一是兩相步進電機的外形,二是五相步進電機內部結構圖。具體它是怎么工作的我們在這里不做具體的討論,只要知道它轉
![]() 胡扯123
2023-03-13 14:16:17
胡扯123
2023-03-13 14:16:17
步進電機的驅動與控制
步進電機的驅動與控制,步進電機基礎(5.9)-步進電機的驅動與控制-三相步進電機的驅動電路前言基本信息前言說明5.9 三相步進電機的驅動電路1 . 三相電機的驅動方式三相步進電機用驅動器ICICIC
![]() jack_study
2021-07-08 09:06:00
jack_study
2021-07-08 09:06:00
二相步進電機和三相步進電機有什么區別?相關資料推薦
二相步進電機和三相步進電機有什么區別?二相步進電機和三相步進電機有什么區別?1. 電機的相數是指電機內部的線圈數不同,兩相步進電機電機內部是由2個線圈組成,而三相步進電機內部是由3個線圈。2. 電機
![]() riverdj
2021-07-08 07:56:56
riverdj
2021-07-08 07:56:56

步進電機驅動電路原理 步進電機驅動器可以通用嗎
步進電機驅動電路原理是指通過特定的電信號驅動步進電機工作的原理。而步進電機驅動器是將驅動電路封裝成一個整體,便于直接使用和連接的設備。在本文中,我將詳細介紹步進電機驅動電路原理。 一、步進電機驅動
2024-01-24 10:46:14
小功率4相步進電機的驅動 及智能驅動方案

01 小功率4相步進電機的驅動 下面是一種驅動電路框圖: 達林頓管陣列ULN2803分別從鎖存器取出第0,2,4,6位和1,3,5,7位去驅動兩個步進電機.四相步進電機的通電順序可以有幾種:A,B
2020-11-11 14:39:59
步進電機+驅動ULN2003相關資料分享
:**電機內部的線圈組數。常見的有二相、 三相、 四相、 五相步進電機。如果使用細分驅動器,則“相數”將變得沒有意義,用戶只需在驅動器上改變細分數,就可以改變步距角。**2.線:**步進電機有...
![]() huzp_bbs
2021-06-29 09:05:38
huzp_bbs
2021-06-29 09:05:38
步進電機驅動電路和控制電路簡述
步進電機驅動電路是一種控制步進電機旋轉的電路系統。步進電機是一種特殊的電機,其轉動角度是以固定的步進角度進行的,而不是連續的旋轉。步進電機驅動電路可以將控制信號轉換為電機電壓和電流信號,使步進電機
2023-03-13 17:06:44
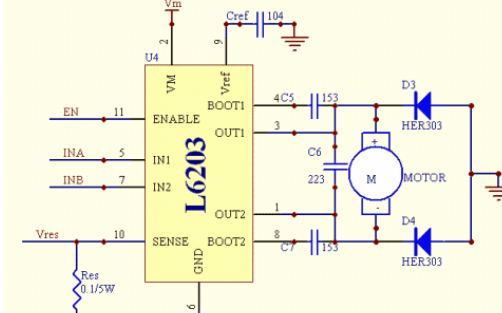
兩相雙極步進電機的驅動電路示例分析
可使用雙通道的H橋驅動電路來驅動兩相雙極步進電機。該框圖是通過PWM工作進行恒流驅動的電路示例,其工作原理基本上與使用PWM輸出方式驅動有刷直流電機相同。
2023-03-10 09:16:13
兩相步進電機的雙極連接和單極連接

從本文開始,將介紹兩相雙極步進電機和兩相單極步進電機的驅動電路,以及兩相雙極步進電機和兩相單極步進電機的驅動方法。首先介紹雙極連接和單極連接。
2021-06-12 11:55:00
【資料分享】圖解步進電機、有刷與無刷電機
圖解步進、無刷、有刷電機:有刷電機是基礎,制動快,平滑調速范圍大,控制電路簡單。工作時電刷會產生電火花,較危險。連續工作5000小時,壽命2年。下圖為有刷電機拆解,左手定子繞組,右手電刷。無刷
![]() 深海零下一度1
2021-06-30 06:13:17
深海零下一度1
2021-06-30 06:13:17
兩相步進電機和五相步進電機有什么區別?
? ? ? 步進電機主要根據相數來進行分類,其中二相和五相步進電機是目前市場上廣泛采用的。二相步進電機每轉最大可細分為400等分,而五相步進電機則可以細分為1000等分。因此,五相步進電機在控制精度
2023-12-22 08:40:32
 工商網監
工商網監





 工商網監
工商網監