") 關(guān)于MBDA開發(fā)六自由度運(yùn)動(dòng)實(shí)驗(yàn)平臺(tái)用于跟蹤天線控制器的分析和演示
關(guān)于MBDA開發(fā)六自由度運(yùn)動(dòng)實(shí)驗(yàn)平臺(tái)用于跟蹤天線控制器的分析和演示

MBDA 的工程師們發(fā)明了一種跟蹤天線控制器,使火箭能夠通過衛(wèi)星與地面站進(jìn)行通信。MBDA 在靜態(tài)測(cè)試中成功地向客戶演示了這項(xiàng)技術(shù)后,客戶要求 MBDA 在動(dòng)態(tài)環(huán)境中進(jìn)行使用演示。
為了盡快滿足這一要求,MBDA 使用基于模型設(shè)計(jì)開發(fā)了一個(gè)實(shí)時(shí)6自由度運(yùn)動(dòng)平臺(tái)。在演示過程中,跟蹤天線控制器抵消了平臺(tái)的運(yùn)動(dòng),使天線始終指向衛(wèi)星,確保可靠通信。
“我們的目標(biāo)是在很短的時(shí)間內(nèi)提供衛(wèi)星通信的動(dòng)態(tài)演示,由此獲得客戶的信任,”MBDA 的部門主管 Tonino Genito 說。“使用 MATLAB 和 Simulink 進(jìn)行基于模型設(shè)計(jì),讓我們能快速開發(fā)出第一個(gè)原型,并在降低成本的同時(shí)加速整個(gè)過程。”
測(cè)試安裝三自由度的機(jī)器人和帶有天線的導(dǎo)彈模型。
挑戰(zhàn)
在靜態(tài)演示中,位于La Spezia的一個(gè)火箭平臺(tái)通過衛(wèi)星與距羅馬400公里的一個(gè)地面站通信。作為一個(gè)持續(xù)發(fā)展的里程碑,MBDA需要進(jìn)行一場(chǎng)實(shí)時(shí)演示,在這種情況下,火箭的姿態(tài)會(huì)像飛行時(shí)那樣發(fā)生變化。
在過去類似的項(xiàng)目中,MBDA都用C++或Fortran手工編碼開發(fā)數(shù)值模擬系統(tǒng)。工程師們意識(shí)到這種方法太慢,不能在規(guī)定期限內(nèi)完成項(xiàng)目。
由于需要在不到3個(gè)月的時(shí)間里用上6自由度運(yùn)動(dòng)平臺(tái),只有兩位工程師的團(tuán)隊(duì)需要加速運(yùn)動(dòng)平臺(tái)以及它的實(shí)時(shí)、硬件在環(huán)(HIL)仿真系統(tǒng)的開發(fā)。
解決方案
MBDA工程師使用MATLAB和Simulink基于模型設(shè)計(jì)開發(fā)實(shí)時(shí)運(yùn)動(dòng)平臺(tái)。
他們采用了一種MBDA之前在Simulink中已經(jīng)開發(fā)出來的6自由度火箭模型。 他們將此6自由度火箭模型與另一個(gè)MBDA團(tuán)隊(duì)在Simulink中開發(fā)的跟蹤天線控制器模型結(jié)合在一起。他們使用組合模型運(yùn)行蒙特卡羅模擬,并改進(jìn)系統(tǒng)的精度和帶寬要求。
兩位工程師使用Simulink Coder從天線控制器模型生成代碼;使用Simulink Real-Time在專用目標(biāo)PC上實(shí)時(shí)運(yùn)行代碼,目標(biāo)PC連接到一個(gè)由工業(yè)機(jī)器人驅(qū)動(dòng)的運(yùn)動(dòng)平臺(tái)。天線安裝在該平臺(tái)上,機(jī)器人的運(yùn)動(dòng)是基于實(shí)時(shí)仿真的結(jié)果。
使用這個(gè)裝置,團(tuán)隊(duì)對(duì)平臺(tái)和跟蹤天線進(jìn)行了實(shí)時(shí)的HIL測(cè)試,驗(yàn)證他們的需求和前期仿真的結(jié)果。
在進(jìn)一步的內(nèi)部測(cè)試后,MBDA的演示驗(yàn)證表明:在模擬的運(yùn)動(dòng)平臺(tái)上,天線控制器可以在整個(gè)任務(wù)過程中跟蹤衛(wèi)星,并且在測(cè)試平臺(tái)和地面站之間保持可靠的衛(wèi)星通信。
“如果沒有實(shí)時(shí)平臺(tái),我們可能需要通過昂貴的飛行試驗(yàn)來向用戶演示我們的技術(shù)能力。有了 基于模型設(shè)計(jì),我們加快了六自由度模型的開發(fā),實(shí)現(xiàn)了實(shí)時(shí)、硬件在環(huán)仿真,增加了客戶對(duì)我們技術(shù)的信心。”
——Tonino Genito, MBDA
MBDA工程師也在進(jìn)行另一個(gè)項(xiàng)目,該項(xiàng)目的目的是能夠在嵌入式硬件上測(cè)試制導(dǎo)、導(dǎo)航和控制算法,這些算法由Embedded Coder從Simulink模型生成代碼,并部署到硬件。
結(jié)果
開發(fā)時(shí)間減半。“與以前手工編寫代碼的方法相比,基于模型設(shè)計(jì)將開發(fā)和驗(yàn)證時(shí)間減少了大約50%。”Genito說,“代碼生成有助于節(jié)省時(shí)間,正如基于模型設(shè)計(jì)可以通過仿真檢測(cè)問題并在模型中快速糾正它們一樣節(jié)省時(shí)間。”
早期發(fā)現(xiàn)并解決錯(cuò)誤。“使用基于模型的設(shè)計(jì),我們快速識(shí)別并解決了設(shè)計(jì)錯(cuò)誤,在很短的時(shí)間內(nèi)達(dá)到零錯(cuò)誤,”MBDA系統(tǒng)工程師Nazario Tancredi說。“使用傳統(tǒng)方法時(shí),在整個(gè)項(xiàng)目中發(fā)現(xiàn)錯(cuò)誤的概率始終保持不變;在基于模型設(shè)計(jì)中錯(cuò)誤的概率會(huì)迅速降低。”
昂貴的飛行測(cè)試減至最少。“因?yàn)轱w行測(cè)試非常昂貴,我們努力減少需要進(jìn)行的飛行測(cè)試的數(shù)量,”Genito說。“采用基于模型設(shè)計(jì),我們加速了用于HIL測(cè)試的實(shí)時(shí)系統(tǒng)開發(fā),這幫助了我們實(shí)現(xiàn)這個(gè)目標(biāo)。”
-
控制器
+關(guān)注
關(guān)注
114文章
17072瀏覽量
183902 -
嵌入式
+關(guān)注
關(guān)注
5148文章
19634瀏覽量
316843 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
29667瀏覽量
212521
發(fā)布評(píng)論請(qǐng)先 登錄
人形機(jī)器人“靈巧手”,正在接近27個(gè)自由度的人手

十字形多自由度超聲電機(jī)接觸分析模型研究
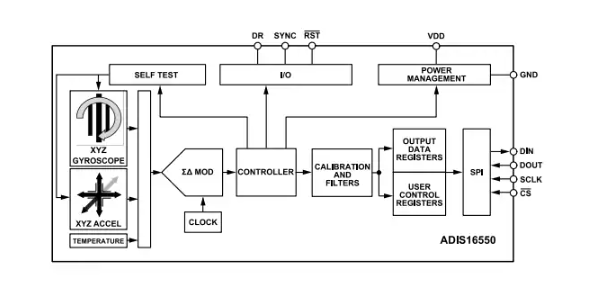
Analog Devices Inc. ADIS16550六自由度慣性傳感器數(shù)據(jù)手冊(cè)

LabVIEW運(yùn)動(dòng)控制(五):EtherCAT運(yùn)動(dòng)控制器的心跳檢測(cè)功能 #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器 #正運(yùn)動(dòng)
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開源六軸機(jī)械臂產(chǎn)品

LabVIEW運(yùn)動(dòng)控制(三):EtherCAT運(yùn)動(dòng)控制器的高效加工指令自定義封裝 #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器

LabVIEW運(yùn)動(dòng)控制(二):EtherCAT運(yùn)動(dòng)控制器的多軸示教加工應(yīng)用(中) #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器
ADIS16488A術(shù)級(jí)10自由度慣性傳感器規(guī)格書

LabVIEW運(yùn)動(dòng)控制(二):EtherCAT運(yùn)動(dòng)控制器的多軸示教加工應(yīng)用(上)#正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器

LabVIEW運(yùn)動(dòng)控制(一):EtherCAT運(yùn)動(dòng)控制器的SCARA機(jī)械手應(yīng)用 #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器
RTSys:自主自研、簡(jiǎn)單易用的運(yùn)動(dòng)控制集成開發(fā)平臺(tái)(下) #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器 #運(yùn)動(dòng)控制卡
H60.XYZTR5六自由度并聯(lián)機(jī)構(gòu)


機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)在智能磁驅(qū)輸送線的應(yīng)用#正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器 #正運(yùn)動(dòng)控制器

EtherCAT運(yùn)動(dòng)控制器上位機(jī)開發(fā)之Python+Qt(三):PDO配置與SDO讀寫# 運(yùn)動(dòng)控制器# 控制卡






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論