") 特斯拉AI主管解釋為何不用激光雷達:我們有超算和深度學習
特斯拉AI主管解釋為何不用激光雷達:我們有超算和深度學習

從當下各大汽車OEM在新車上采用的自動/輔助駕駛方案來看,不少用到了英偉達、Mobileye或是地平線的高性能芯片,也有用到Lumina、Velodyne或覽沃的激光雷達。但歸根結(jié)底這些都是機器視覺加上先進傳感器的方案,而特斯拉卻一直堅持采用攝像頭的純視覺方案,成了諸多車廠中的一個“異類”。
在上月舉辦的機器視覺和模式識別國際會議(CVPR 2021)上,特斯拉AI主管Andrej Karpathy解釋了為何特斯拉用不到激光雷達。Andrej Karpathy畢業(yè)于斯坦福大學,也是AI大神李飛飛的得意門生之一,他在畢業(yè)后成了OpenAI的一位研究員,隨后被埃隆·馬斯克親自挖去特斯拉做AI主管。
低成本、易維護且方便更新的純視覺系統(tǒng)
深度神經(jīng)網(wǎng)絡是自動駕駛技術(shù)的主要技術(shù)之一,通過處理車載攝像頭傳輸?shù)臄?shù)據(jù)來分析道路、標志、汽車、障礙和行人。但深度學習在圖像中檢測物體往往會出現(xiàn)失誤,因此多數(shù)自動駕駛公司,比如Waymo等,都采用激光雷達來繪制車身周圍的3D地圖,補全神經(jīng)網(wǎng)絡缺失的信息。
然而Andrej提到,激光雷達在自動駕駛上也有自己的難處,你必須用高成本的激光雷達預繪制環(huán)境,然后創(chuàng)建高分辨率地圖,將街道和交通燈聯(lián)系在一起,最后只能局限于這些地圖來駕駛。不過,繪制每個地點的精確地圖是相當困難的,并不是路測車輛收集構(gòu)建好這些高分辨率地圖就完事了,還需要長期的維持工作,很難保證這些基礎設備和數(shù)據(jù)的更新工作。
特斯拉并沒有采用激光雷達和高分辨率地圖結(jié)合的方案,Andrej稱“對特斯拉來說,一切都是初次發(fā)生的,單單靠車身上的八個攝像頭”。經(jīng)過幾年的迭代,特斯拉的自動駕駛工作絕大多數(shù)都是由攝像頭實現(xiàn),以至于車身上其他的傳感器開始“吃灰”。為此,特斯拉也在今年5月宣布,即日起北美制造的Model 3和Model Y也不再配備毫米波雷達,全面過渡到以攝像頭為主,輔以超聲波雷達的特斯拉視覺系統(tǒng)。
自動標注生成的數(shù)據(jù)集和高效的神經(jīng)網(wǎng)絡
在許多激光雷達和攝像頭的參數(shù)性能比較中,測距往往都是攝像頭的弱項。然而,人類本身也是用“眼鏡”這一純視覺方案來進行距離和速度判斷的,那么人工神經(jīng)網(wǎng)絡能否做到這一點呢?Andrej稱在過去幾個月的研究工作中發(fā)現(xiàn),這個問題的答案是肯定的。
特斯拉的工作室為了創(chuàng)建這樣一個可以精確檢測物體距離、速度和加速度的深度學習系統(tǒng),將這一挑戰(zhàn)視為監(jiān)督式學習的問題。監(jiān)督式學習是機器學習中常用的一個方法,此處則被用于在標注數(shù)據(jù)訓練后,讓神經(jīng)網(wǎng)絡學習如何檢測物體和它們的附加屬性。
而打造這樣一個系統(tǒng),需要的是大量的視頻數(shù)據(jù)、清晰精確的標準數(shù)據(jù)和諸多極端情況組成的數(shù)據(jù)集。
特斯拉與其他具備數(shù)據(jù)采集能力的汽車品牌相比有著一個獨到的優(yōu)勢,那就是數(shù)量。有了百萬輛配備攝像頭的汽車,特斯拉根本不愁數(shù)據(jù)量。
在雨雪等條件下依然能夠正常運轉(zhuǎn)的自動標注 / 特斯拉
那么這種標注是如何進行的呢?一種可行方案是依靠數(shù)據(jù)標注公司進行手工標注,但這樣做的話不僅耗時耗力,成本也不低。特斯拉的自動標注技術(shù)結(jié)合了神經(jīng)網(wǎng)絡、雷達數(shù)據(jù)和人類審查。由于這一數(shù)據(jù)集是離線標注的,所以神經(jīng)網(wǎng)絡可以來回播放視頻,將預測與事實進行比對,從而調(diào)整其參數(shù),恰恰與實時運行的測試時推理相反。
這種離線標注還有一個好處,那就是特斯拉工程師得以實現(xiàn)無法部署在車上的密集運算型物體檢測網(wǎng)絡,將其用于低延遲的實時應用中去。而雷達的數(shù)據(jù)只是用于進一步驗證神經(jīng)網(wǎng)絡的推理,這個過程還可以讓人工介入,進行一些判斷上的編輯、驗證和調(diào)整工作。
為了實現(xiàn)更好的速度和加速度判斷,在打造這一數(shù)據(jù)集的過程中,特斯拉團隊花了4個月時間開發(fā)了221個觸發(fā)器來指出物體檢測系統(tǒng)上還需哪些調(diào)整,比如雷達與視覺對比不符、物體邊框抖動、純靠主攝像頭進行的檢測等等。這些觸發(fā)器部署在消費車輛中,進行了7輪靜默模式的運轉(zhuǎn),這些觸發(fā)器并不會對車輛下達任何指令,而輸出的數(shù)據(jù)會和雷達數(shù)據(jù)和駕駛員本身行為進行比較。
最后生成的數(shù)據(jù)集中,特斯拉自動駕駛團隊已經(jīng)收集了1.5PB的數(shù)據(jù),由100萬個10秒視頻和60億物體標注組成。
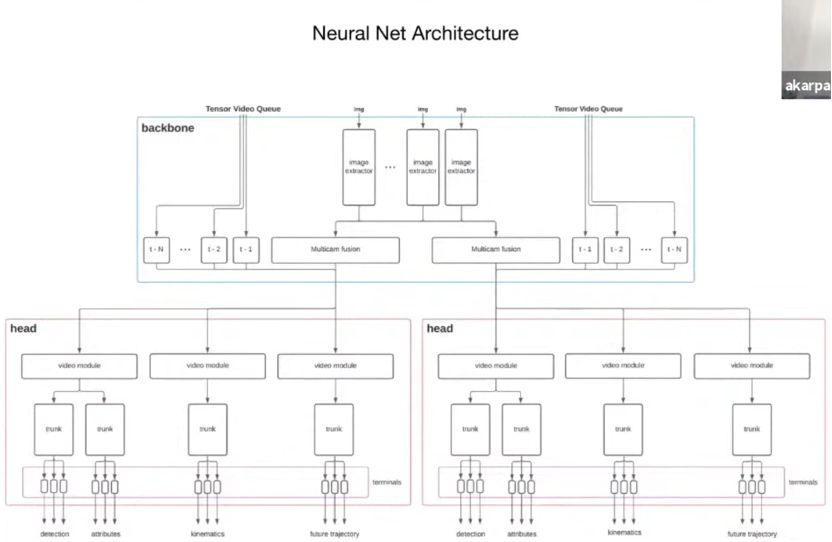
特斯拉自動駕駛神經(jīng)網(wǎng)絡架構(gòu) / 特斯拉
為了充分利用這一數(shù)據(jù)集,特斯拉自動駕駛團隊打造了一個高效的循環(huán)神經(jīng)網(wǎng)絡。數(shù)據(jù)經(jīng)過多層次的網(wǎng)絡結(jié)構(gòu),從而輸出多個參數(shù)。這種架構(gòu)為分布式分工創(chuàng)造了條件,當前特斯拉有一個由20人左右組成的團隊,他們正在全力訓練這一神經(jīng)網(wǎng)絡,負責各自的模塊。
用來訓練深度學習模型的超級計算機
為了處理如此龐大的工作量自然也需要強大的機器,特斯拉當前有三臺用于自動駕駛開發(fā)的超算集群。其中最新的一臺包含720個節(jié)點,每個節(jié)點都由8張英偉達A100 80GB加速卡組成,等于一臺機器就內(nèi)置了5760個GPU。該機器的算力達到了驚人的1.8 EFLOPS,配備了10PB的頂級NVME存儲,速率達到1.6 TBps。
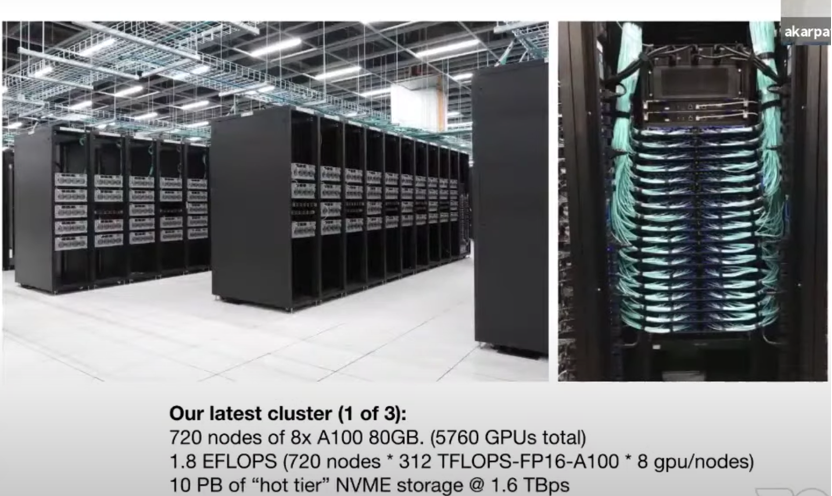
內(nèi)部超級計算機 / 特斯拉
除此之外,為了保障自動駕駛的流暢運行,其自研的FSD自動駕駛芯片也有著強悍的性能。特斯拉的優(yōu)勢在于其垂直集成的開發(fā),這意味著不論是其CPU、GPU還是NPU,都能最大限度地利用這一神經(jīng)網(wǎng)絡驅(qū)動的視覺方案。

FSD自動駕駛芯片 / 特斯拉
小結(jié)
目前特斯拉的FSD自動駕駛系統(tǒng)已經(jīng)進入了測試階段,已經(jīng)有2000余名的車主在使用這一技術(shù)。特斯拉也在繼續(xù)開發(fā)這一系統(tǒng),加入更多的駕駛功能。

NHTSA對4月27日前后生產(chǎn)的Model Y評級 / NHTSA
不過,特斯拉拋棄毫米波雷達的做法也引來的一些是非,美國國家公路交通安全管理局(NHTSA)表示,取消毫米波雷達的Model 3和Model Y將失去具備部分先進安全功能的標簽。尚不清楚這未來經(jīng)過測試調(diào)研后,幾款車型會不會重新獲得這些認證,不過可以肯定的是,特斯拉已經(jīng)打算在攝像頭為主的純視覺方案上堅定不移地走下去了。
在上月舉辦的機器視覺和模式識別國際會議(CVPR 2021)上,特斯拉AI主管Andrej Karpathy解釋了為何特斯拉用不到激光雷達。Andrej Karpathy畢業(yè)于斯坦福大學,也是AI大神李飛飛的得意門生之一,他在畢業(yè)后成了OpenAI的一位研究員,隨后被埃隆·馬斯克親自挖去特斯拉做AI主管。
低成本、易維護且方便更新的純視覺系統(tǒng)
深度神經(jīng)網(wǎng)絡是自動駕駛技術(shù)的主要技術(shù)之一,通過處理車載攝像頭傳輸?shù)臄?shù)據(jù)來分析道路、標志、汽車、障礙和行人。但深度學習在圖像中檢測物體往往會出現(xiàn)失誤,因此多數(shù)自動駕駛公司,比如Waymo等,都采用激光雷達來繪制車身周圍的3D地圖,補全神經(jīng)網(wǎng)絡缺失的信息。
然而Andrej提到,激光雷達在自動駕駛上也有自己的難處,你必須用高成本的激光雷達預繪制環(huán)境,然后創(chuàng)建高分辨率地圖,將街道和交通燈聯(lián)系在一起,最后只能局限于這些地圖來駕駛。不過,繪制每個地點的精確地圖是相當困難的,并不是路測車輛收集構(gòu)建好這些高分辨率地圖就完事了,還需要長期的維持工作,很難保證這些基礎設備和數(shù)據(jù)的更新工作。
特斯拉并沒有采用激光雷達和高分辨率地圖結(jié)合的方案,Andrej稱“對特斯拉來說,一切都是初次發(fā)生的,單單靠車身上的八個攝像頭”。經(jīng)過幾年的迭代,特斯拉的自動駕駛工作絕大多數(shù)都是由攝像頭實現(xiàn),以至于車身上其他的傳感器開始“吃灰”。為此,特斯拉也在今年5月宣布,即日起北美制造的Model 3和Model Y也不再配備毫米波雷達,全面過渡到以攝像頭為主,輔以超聲波雷達的特斯拉視覺系統(tǒng)。
自動標注生成的數(shù)據(jù)集和高效的神經(jīng)網(wǎng)絡
在許多激光雷達和攝像頭的參數(shù)性能比較中,測距往往都是攝像頭的弱項。然而,人類本身也是用“眼鏡”這一純視覺方案來進行距離和速度判斷的,那么人工神經(jīng)網(wǎng)絡能否做到這一點呢?Andrej稱在過去幾個月的研究工作中發(fā)現(xiàn),這個問題的答案是肯定的。
特斯拉的工作室為了創(chuàng)建這樣一個可以精確檢測物體距離、速度和加速度的深度學習系統(tǒng),將這一挑戰(zhàn)視為監(jiān)督式學習的問題。監(jiān)督式學習是機器學習中常用的一個方法,此處則被用于在標注數(shù)據(jù)訓練后,讓神經(jīng)網(wǎng)絡學習如何檢測物體和它們的附加屬性。
而打造這樣一個系統(tǒng),需要的是大量的視頻數(shù)據(jù)、清晰精確的標準數(shù)據(jù)和諸多極端情況組成的數(shù)據(jù)集。
特斯拉與其他具備數(shù)據(jù)采集能力的汽車品牌相比有著一個獨到的優(yōu)勢,那就是數(shù)量。有了百萬輛配備攝像頭的汽車,特斯拉根本不愁數(shù)據(jù)量。
在雨雪等條件下依然能夠正常運轉(zhuǎn)的自動標注 / 特斯拉
那么這種標注是如何進行的呢?一種可行方案是依靠數(shù)據(jù)標注公司進行手工標注,但這樣做的話不僅耗時耗力,成本也不低。特斯拉的自動標注技術(shù)結(jié)合了神經(jīng)網(wǎng)絡、雷達數(shù)據(jù)和人類審查。由于這一數(shù)據(jù)集是離線標注的,所以神經(jīng)網(wǎng)絡可以來回播放視頻,將預測與事實進行比對,從而調(diào)整其參數(shù),恰恰與實時運行的測試時推理相反。
這種離線標注還有一個好處,那就是特斯拉工程師得以實現(xiàn)無法部署在車上的密集運算型物體檢測網(wǎng)絡,將其用于低延遲的實時應用中去。而雷達的數(shù)據(jù)只是用于進一步驗證神經(jīng)網(wǎng)絡的推理,這個過程還可以讓人工介入,進行一些判斷上的編輯、驗證和調(diào)整工作。
為了實現(xiàn)更好的速度和加速度判斷,在打造這一數(shù)據(jù)集的過程中,特斯拉團隊花了4個月時間開發(fā)了221個觸發(fā)器來指出物體檢測系統(tǒng)上還需哪些調(diào)整,比如雷達與視覺對比不符、物體邊框抖動、純靠主攝像頭進行的檢測等等。這些觸發(fā)器部署在消費車輛中,進行了7輪靜默模式的運轉(zhuǎn),這些觸發(fā)器并不會對車輛下達任何指令,而輸出的數(shù)據(jù)會和雷達數(shù)據(jù)和駕駛員本身行為進行比較。
最后生成的數(shù)據(jù)集中,特斯拉自動駕駛團隊已經(jīng)收集了1.5PB的數(shù)據(jù),由100萬個10秒視頻和60億物體標注組成。
特斯拉自動駕駛神經(jīng)網(wǎng)絡架構(gòu) / 特斯拉
為了充分利用這一數(shù)據(jù)集,特斯拉自動駕駛團隊打造了一個高效的循環(huán)神經(jīng)網(wǎng)絡。數(shù)據(jù)經(jīng)過多層次的網(wǎng)絡結(jié)構(gòu),從而輸出多個參數(shù)。這種架構(gòu)為分布式分工創(chuàng)造了條件,當前特斯拉有一個由20人左右組成的團隊,他們正在全力訓練這一神經(jīng)網(wǎng)絡,負責各自的模塊。
用來訓練深度學習模型的超級計算機
為了處理如此龐大的工作量自然也需要強大的機器,特斯拉當前有三臺用于自動駕駛開發(fā)的超算集群。其中最新的一臺包含720個節(jié)點,每個節(jié)點都由8張英偉達A100 80GB加速卡組成,等于一臺機器就內(nèi)置了5760個GPU。該機器的算力達到了驚人的1.8 EFLOPS,配備了10PB的頂級NVME存儲,速率達到1.6 TBps。
內(nèi)部超級計算機 / 特斯拉
除此之外,為了保障自動駕駛的流暢運行,其自研的FSD自動駕駛芯片也有著強悍的性能。特斯拉的優(yōu)勢在于其垂直集成的開發(fā),這意味著不論是其CPU、GPU還是NPU,都能最大限度地利用這一神經(jīng)網(wǎng)絡驅(qū)動的視覺方案。
FSD自動駕駛芯片 / 特斯拉
小結(jié)
目前特斯拉的FSD自動駕駛系統(tǒng)已經(jīng)進入了測試階段,已經(jīng)有2000余名的車主在使用這一技術(shù)。特斯拉也在繼續(xù)開發(fā)這一系統(tǒng),加入更多的駕駛功能。
NHTSA對4月27日前后生產(chǎn)的Model Y評級 / NHTSA
不過,特斯拉拋棄毫米波雷達的做法也引來的一些是非,美國國家公路交通安全管理局(NHTSA)表示,取消毫米波雷達的Model 3和Model Y將失去具備部分先進安全功能的標簽。尚不清楚這未來經(jīng)過測試調(diào)研后,幾款車型會不會重新獲得這些認證,不過可以肯定的是,特斯拉已經(jīng)打算在攝像頭為主的純視覺方案上堅定不移地走下去了。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
傳感器
+關(guān)注
關(guān)注
2565文章
52862瀏覽量
766277 -
特斯拉
+關(guān)注
關(guān)注
66文章
6378瀏覽量
128990 -
AI
+關(guān)注
關(guān)注
88文章
34918瀏覽量
278141 -
激光雷達
+關(guān)注
關(guān)注
971文章
4226瀏覽量
192628
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
CES 2025激光雷達觀察:“千線”激光雷達亮相,頭部廠商布局具身智能
廠商也展示了最新的方案,包括集成在座艙內(nèi)的激光雷達方案,F(xiàn)MCW激光雷達等。 ? 下面我們就來看下這屆CES上激光雷達行業(yè)有哪些新的發(fā)展動態(tài)

SPAD席卷車載激光雷達市場
電子發(fā)燒友網(wǎng)報道(文/梁浩斌)上周我們報道了一款新推出的激光雷達ASIC方案,值得關(guān)注的是該方案中與ASIC搭配的傳感器均選擇了SiPM。當然從成本的角度來看,作為第三方的激光雷達ASIC方案
激光雷達在自動駕駛中為何不可替代?
109.6%。在很多車企不斷追求純視覺的當下,為何激光雷達的銷量反而“逆勢”增長?激光雷達在自動駕駛中為何不可替代? 其實環(huán)境感知作為自動駕駛的“元感官”,在保證車輛安全、提高決策效率

DeepSeek:2025年激光雷達技術(shù)與行業(yè)應用趨勢
近日DeepSeek的火爆,我想知道它對激光雷達技術(shù)與行業(yè)應用趨勢的看法。以下內(nèi)容來源于DeepSeek-R1,僅供參考。2025年激光雷達技術(shù)與行業(yè)應用趨勢:深度分析與預測一、技術(shù)趨勢:從固態(tài)化到

激光雷達領(lǐng)域的新秀利器—SPAD23
分析在激光雷達系統(tǒng)中的關(guān)鍵應用以及在激光雷達系統(tǒng)中核心器件的技術(shù)特性

禾賽拒絕“激光雷達無用論”
在特斯拉發(fā)布FSD新版本后,視覺派和激光雷達派的爭論再次升溫。 與此同時,激光雷達企業(yè)也開始在車載智駕領(lǐng)域之外尋找新的市場機會。 在CES 2025上,禾賽科技推出了一系列新的激光雷達

一則消息引爆激光雷達行業(yè)!特斯拉竟然在自研激光雷達?
電子發(fā)燒友網(wǎng)報道(文/梁浩斌)一則消息引爆激光雷達行業(yè)?上周業(yè)界流傳的一份會議紀要稱,有自動駕駛專家透露,特斯拉已經(jīng)設計了自己的激光雷達,并正在與大陸集團合作,將自己開發(fā)的
激光雷達,明年要降價至200美元
? 電子發(fā)燒友網(wǎng)報道(文/梁浩斌)激光雷達降本的速度,在進入大規(guī)模量產(chǎn)之后開始不斷加速。從2021年激光雷達剛剛大規(guī)模上車,單個激光雷達1000美元;到2023年,激光雷達降至500美

激光雷達會傷害眼睛嗎?
隨著激光雷達日益普及,人們開始擔憂:這種發(fā)射激光的設備,對人眼的安全性如何?了解這個問題前,我們首先需要知道激光雷達和它發(fā)射的激光,到底是什

激光雷達的維護與故障排查技巧
激光雷達(LiDAR,Light Detection and Ranging)是一種利用激光進行距離測量和目標識別的技術(shù)。它廣泛應用于無人駕駛汽車、地理信息系統(tǒng)(GIS)、環(huán)境監(jiān)測、航空航天等領(lǐng)域
激光雷達技術(shù)的基于深度學習的進步
信息。這使得激光雷達在自動駕駛、無人機、機器人等領(lǐng)域具有廣泛的應用前景。 二、深度學習技術(shù)的發(fā)展 深度學習是機器
激光雷達技術(shù)的發(fā)展趨勢
激光雷達(LiDAR,Light Detection and Ranging)技術(shù)是一種通過發(fā)射激光脈沖并接收其反射來測量距離和速度的遙感技術(shù)。它在多個領(lǐng)域,如測繪、環(huán)境監(jiān)測、自動駕駛汽車和無人機等
物聯(lián)網(wǎng)系統(tǒng)中的高精度測距方案_單點TOF激光雷達
物聯(lián)網(wǎng)系統(tǒng)中為什么要使用單點TOF激光雷達 物聯(lián)網(wǎng)系統(tǒng)中使用單點TOF(Time of Flight,飛行時間)激光雷達的原因主要基于其獨特的優(yōu)勢和應用場景的需求。以下是詳細的解釋: 單點TOF

光學雷達和激光雷達的區(qū)別是什么
光學雷達和激光雷達是兩種不同的遙感技術(shù),它們在原理、應用、優(yōu)缺點等方面都存在一定的差異。以下是對光學雷達和激光雷達的比較: 定義和原理 光學雷達
lidar激光雷達掃描儀有什么用
LiDAR(Light Detection and Ranging,激光探測與測距)是一種利用激光技術(shù)進行距離測量和成像的技術(shù)。LiDAR激光雷達掃描儀具有高精度、高分辨率、快速掃描等特點,廣泛應用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論