") 面向SLAM魯棒應(yīng)用提出了基于RGB特征點(diǎn)提取算法
面向SLAM魯棒應(yīng)用提出了基于RGB特征點(diǎn)提取算法

摘 要 :視覺 SLAM(Simultaneous Localization And Mapping)的魯棒性是困擾其走向應(yīng)用的瓶頸,其中特征點(diǎn)提取算法的魯棒性是重要影響因素。針對目前特征點(diǎn)提取算法普遍基于灰度圖像,造成較大信息損失的問題,提出 RGB 圖像的信息熵度量,驗(yàn)證了 RGB 圖像變換為灰度圖像的信息損失。在此基礎(chǔ)上,提出了基于信息熵評價的特征點(diǎn)提取算法,根據(jù) RGB 圖像三個通道的信息熵確定灰度變換權(quán)重,最大限度保留圖像信息 ;然后利用 FAST算法進(jìn)行特征提取 ;最后直接基于 RGB 三通道構(gòu)建特征描述子,實(shí)現(xiàn)特征在像素級的融合,為特征匹配提供可靠的依據(jù)。通過實(shí)驗(yàn)證明,改進(jìn)的 RGB 特征點(diǎn)提取算法的匹配精度相比經(jīng)典 ORB 算法在一定程度上有所提高 ;同時,相較于使用 RANSC 算法的 ORB 算法,二者精度基本相同,但較大程度地縮短了處理時間,基本可以滿足實(shí)時處理的需求。
0 引 言
視覺SLAM(Simultaneous Localization And Mapping)的關(guān)鍵是建立圖像間魯棒的特征點(diǎn)匹配關(guān)系,其決定著攝像機(jī)運(yùn)動參數(shù)的求解精度和目標(biāo)點(diǎn)三維世界坐標(biāo)重建精度[1],而影響匹配效果的重要因素是特征點(diǎn)提取算法。當(dāng)前相對成熟的視覺SLAM解決方案有 Mono[2]、PTAM[3]、ORBSLAM[4]、SVO[5]、LSD-SLAM[6]和ORBSLAM2[7]等,普遍基于灰度圖像進(jìn)行特征點(diǎn)提取即匹配,對于環(huán)境對比明顯的情況表現(xiàn)相對穩(wěn)定,尤其ORBSLAM2更是因采用ORB特征在室外環(huán)境也有著較好的表現(xiàn) ;相比于 SIFT、SURF 等多尺度提取算法,ORB特征提取算法簡單,匹配精度相對較高,適合實(shí)時應(yīng)用的場合。但也存在著當(dāng)環(huán)境局部紋理或結(jié)構(gòu)相似時所提取特征點(diǎn)的描述子無法加以區(qū)別的問題,從而造成錯誤匹配,而這種錯誤在多數(shù)應(yīng)用場景下是無法接受的。為此,尋求更為魯棒的特征點(diǎn)提取算法對于視覺SLAM就顯得尤為重要。隨著彩色圖像處理技術(shù)的不斷發(fā)展,基于彩色圖像的特征提取已經(jīng)應(yīng)用在很多場合。彩色圖像包含的特征信息要多于灰度圖像,它不僅包含灰度圖所攜帶的特征信息,還包含飽和度及色度分量的特征信息。據(jù)統(tǒng)計,基于灰度圖像提取的特征信息僅占原始彩色圖像的百分之九十。本文將充分挖掘彩色圖像所包含的信息,構(gòu)建基于RGB圖像特征點(diǎn)提取算法,以此提高視覺SLAM的魯棒性。
1 RGB圖像信息熵度量
圖像特征點(diǎn)提取的本質(zhì)即信息的提取,如果能對灰度圖像和彩色圖像包含信息進(jìn)行特定度量和比較,將為信息提取算法提供理論上的指導(dǎo)。按照 Marr 計算理論 [8],圖像中的信息即圖像中顏色或亮度的變化,呈現(xiàn)出的是物體和物體的關(guān)系以及與人的關(guān)系的要素。如果把一幅圖像看作一個虛構(gòu)零記憶“灰度信源”的輸出時,可以通過觀察圖像的直方圖來估計該信源的符號概率。假設(shè)圖像大小為M×N,灰度范圍為 [0,L-1],rk為此區(qū)間的離散灰度隨機(jī)變量,nk為第k級灰度在圖像中出現(xiàn)的次數(shù)。這時,灰度信源的熵變?yōu)?:

其中,
目前對于RGB值和灰度的轉(zhuǎn)換,從心理學(xué)的角度來看滿足人眼從彩色到亮度的感覺轉(zhuǎn)換,對紅、綠、藍(lán)三種顏色賦以固定權(quán)重,通過加權(quán)求和得到灰度值,數(shù)學(xué)關(guān)系如下 :

其中:R、G、B 分別為對應(yīng)像素的紅、綠、藍(lán)分量;Grey為轉(zhuǎn)換后像素的灰度值。
根據(jù)式(1)圖像信息熵的定義,變換后的灰度圖像的信息熵可輕易求得,而原始 RGB 圖像的信息熵成為問題的關(guān)鍵。如果將 RGB 圖像看作三個獨(dú)立圖層的簡單疊加,則它的信息熵就是三個圖層信息熵的和,即 :

其中:HR、HG、HB 分別為R、G、B三個圖層對應(yīng)的信息熵,而HRGB為彩色圖像總的信息熵。此種定義在形式上比較簡單,但其割裂了三個圖層的彼此聯(lián)系,這與實(shí)際情況不符。為最大限度反映彩色圖像的信息規(guī)律,將R、G、B 三個圖層看作一個整體,某個像素看作隨機(jī)向量rRGB=(R, G, B),R∈[0,L-1],G ∈[0, L-1],B∈[0, L-1],則其信息熵可定義為:

其中,
在此運(yùn)用上述定義對變換前后的RGB圖像和灰度圖像的信息進(jìn)行比較,為得到可靠的結(jié)果,選用了4幅不同場景的圖像進(jìn)行變換,其結(jié)果如圖1所示。
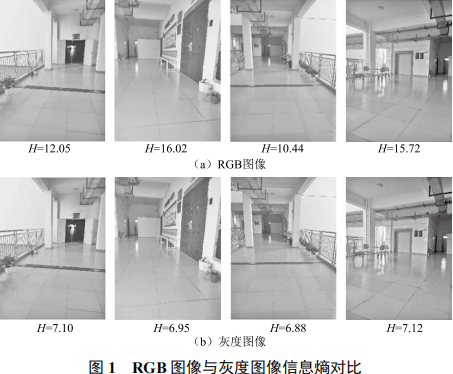
由圖1可以看出,RGB信息熵都遠(yuǎn)大于相對應(yīng)的灰度圖像信息熵。也就是彩色圖像變換為灰度圖像后,圖像的信息量有比較大的損失,對后續(xù)的特征提取必將產(chǎn)生影響。
2 基于RGB特征點(diǎn)提取算法
基于RGB圖像的特征點(diǎn)提取算法可分為三類 :一是基于輸出融合,分別對RGB圖像三個通道進(jìn)行特征提取,根據(jù)設(shè)計的融合準(zhǔn)則得到整體的特征,實(shí)現(xiàn)相對簡單,但容易導(dǎo)致信息丟失 ;二是基于RGB顏色向量,將RGB圖像看作二維網(wǎng)格上的三維向量場,通過求解向量值函數(shù)實(shí)現(xiàn)特征提取 ;三是多維梯度方法,屬于信息級的融合策略,可實(shí)現(xiàn)最終RGB特征信息增強(qiáng)[9-10]。
2.1 RGB 特征點(diǎn)查找算法
本文將采用第二類方法,基于信息熵計算RGB每個分量的最優(yōu)融合權(quán)值,實(shí)現(xiàn)像素級的融合。算法步驟如下 :
(1)計算RGB圖像三個通道IR、IG、IB的信息熵 :
其中,pR(Rk)、pG(Gk)、pB(Bk) 分別是IR、IG、IB三個通道的直方圖統(tǒng)計量。
(2)根據(jù)圖像信息量確定三個通道的權(quán)重。為了最大限度地保留圖像信息,按照信息量的大小分配權(quán)重 :

(3)基于信息量將RGB圖像線性變換為灰度圖像 :

式中,R、G、B分別是RGB圖像任意像素的分量。
由此證明基于信息熵的線性變換的信息量得到最大保留, 該命題可等效為 :任意假設(shè)線性變換Grey=λRR+λGG+λBB,對應(yīng)的信息量HGrey≤HGreyI。
證明 :假設(shè) Greyk 為變換后灰度圖像的離散灰度隨機(jī)變量,Rk、Gk、Bk分別為原始RGB圖像三通道IR、IG、IB的離散隨機(jī)變量。根據(jù)信息論可知,當(dāng)信源的方差越大,則信息熵越大。
假設(shè)IR、IG、IB的方差分別為D(Rk)、D(Gk)、D(Bk),且D(Rk)>D(Gk)>D(Bk), 則可推出HR>HG>HB, 從而推出λRI>λGI>λBI。
根據(jù)方差性質(zhì) :D(Greyk)=λR2D(Rk)+λG2D(Gk)+λB2D(Bk),則有λR+λG+λB=1,推出:λR2D(Rk)+λG2D(Gk)+λB2D(Bk) ≤ λ2RID(Rk)+λ2GID(Gk)+λ2BI D(Bk),從而有:HGrey ≤ HGreyI。
(4)運(yùn)用FAST算法確定特征點(diǎn),此處不再贅述。
2.2 RGB 特征點(diǎn)描述子
本文采用的特征點(diǎn)描述子是在 Brief 描述子基礎(chǔ)上加以改進(jìn)的。為充分利用 RGB 三個通道的信息,描述子建立如下 :
(1)將RGB圖像看作M×N×3的數(shù)組,IR、IG、IB 由上至下分布,以IG某二維特征點(diǎn) (x,y)為中心,取S×S×3的立體鄰域。
(2)在鄰域內(nèi)隨機(jī)選取一對點(diǎn)。隨機(jī)規(guī)則設(shè)計如下 :在圖層選擇上采取均勻隨機(jī)采樣 ;圖層上像素采用高斯兩步隨機(jī)采樣,即首先對xi 按照高斯分布 采樣,然后對yi 按照高斯分布
采樣,然后對yi 按照高斯分布 采樣。
采樣。
(3)比較二者像素的大小,并按照如下公式進(jìn)行二進(jìn)制賦值。

其中,p(xi, yi)和p(xi', yi')是隨機(jī)點(diǎn)(xi, yi)和(xi', yi')處的像素值。
(4)重復(fù)步驟 1 ~3,生成一個二進(jìn)制編碼,此編碼即為特征點(diǎn)描述子。
3 實(shí)驗(yàn)及分析
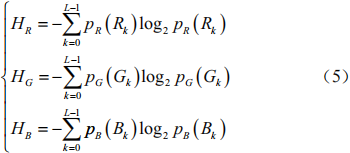
為驗(yàn)證本文提出的特征點(diǎn)提取算法,擬與原始ORB特征點(diǎn)檢測算法進(jìn)行比較。分別采集兩組圖片 :第一組是在相同場景下通過平移、旋轉(zhuǎn)、尺度等變換得到的 ;第二組為完全不同的場景圖片。分別對兩組圖片進(jìn)行特征點(diǎn)提取,并進(jìn)行特征點(diǎn)匹配,采用改進(jìn)的 ORB特征點(diǎn)提取算法(為使ORB 算法具有尺度、旋轉(zhuǎn)不變性,在此將原算法中的Brie描述子更換為 Surf 描述子)的結(jié)果如圖2、圖3所示。
由圖中可看出,相同場景下大部分點(diǎn)的匹配是正確的,由于未采用RANSC算法,有少數(shù)點(diǎn)發(fā)生了匹配錯誤。如果采用RANSC算法,誤匹配點(diǎn)對可以避免,但匹配時間會大大增加,平均為218.902 ms。對完全不同的場景進(jìn)行特征提取,即使使用了RANSC算法仍然存在明顯的3處誤匹配,這種錯誤對于人類視覺而言是荒唐的。特征描述子采用的是局部鄰域編碼,從原理上只是經(jīng)過編碼的特征點(diǎn)的匹配,不代表客觀物體間關(guān)系的匹配。產(chǎn)生這一現(xiàn)象一方面是由于特征定義的問題,另一方面是由于算法普遍是基于灰度圖像,未能充分利用原始RGB圖像信息的問題。
對以上兩組圖片采用本文提出的基于RGB特征點(diǎn)提取算法進(jìn)行處理,同時采用基于距離的匹配算法進(jìn)行匹配,其結(jié)果如圖4、圖5所示。
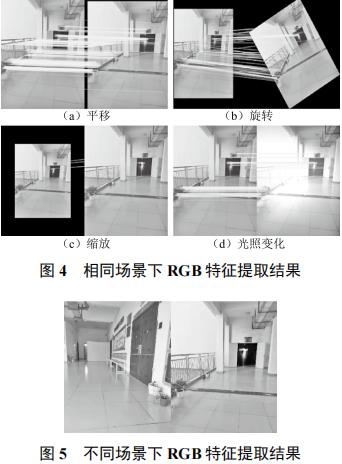
相較于原算法,相同場景下基于RGB特征點(diǎn)的提取算法降低了錯誤匹配,其與原算法組合使用RANSC算法的性能相近,但處理時間縮短了62.014 ms。也說明了在算法充分利用RGB信息后,對于匹配結(jié)果的提升是有效的。但在不同場景下基于RGB特征提取仍然存在著極少的明顯誤匹配,這是因?yàn)樗惴ū旧砣允腔趫D像局部范圍,當(dāng)不同場景存在著較大的相似度時,這種錯誤發(fā)生的概率就會增加,通過擴(kuò)大描述子隨機(jī)范圍可以降低錯誤率,但不可能完全避免。
4 結(jié) 語
本文面向SLAM魯棒應(yīng)用提出了基于RGB特征點(diǎn)提取算法,通過與目前普遍使用的ORB特征提取算法進(jìn)行比較,發(fā)現(xiàn)誤匹配率有明顯降低,性能與使用RANSC算法相當(dāng),但處理時間得到了明顯降低,從而也驗(yàn)證了本文提出的RGB圖像信息熵度量方法的正確性,從信息論的角度解釋了算法的有效性。今后,將圍繞不同場景下誤匹配發(fā)生的機(jī)理展開理論研究,進(jìn)一步提升特征提取的魯棒性。
審核編輯 :李倩
-
圖像
+關(guān)注
關(guān)注
2文章
1094瀏覽量
41133 -
RGB
+關(guān)注
關(guān)注
4文章
806瀏覽量
59767 -
SLAM
+關(guān)注
關(guān)注
24文章
438瀏覽量
32425
原文標(biāo)題:論文速覽 | 面向視覺SLAM的改進(jìn)RGB特征點(diǎn)檢測算法
文章出處:【微信號:iotmag,微信公眾號:iotmag】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】視覺實(shí)現(xiàn)的基礎(chǔ)算法的應(yīng)用
永磁同步電機(jī)(PMSM)調(diào)速系統(tǒng)的智能控制算法研究
一種基于點(diǎn)、線和消失點(diǎn)特征的單目SLAM系統(tǒng)設(shè)計

VirtualLab Fusion應(yīng)用:光柵的魯棒性分析與優(yōu)化
《具身智能機(jī)器人系統(tǒng)》第10-13章閱讀心得之具身智能機(jī)器人計算挑戰(zhàn)
自動駕駛中常提的魯棒性是個啥?

用于任意排列多相機(jī)的通用視覺里程計系統(tǒng)

利用VLM和MLLMs實(shí)現(xiàn)SLAM語義增強(qiáng)

MG-SLAM:融合結(jié)構(gòu)化線特征優(yōu)化高斯SLAM算法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論