") myAGV移動(dòng)機(jī)器人+mechArm六軸機(jī)械臂,開(kāi)源復(fù)合機(jī)器人開(kāi)發(fā)與實(shí)踐
myAGV移動(dòng)機(jī)器人+mechArm六軸機(jī)械臂,開(kāi)源復(fù)合機(jī)器人開(kāi)發(fā)與實(shí)踐

1、 介紹產(chǎn)品
mechArm與myAGV
2、介紹項(xiàng)目想要干什么
3、執(zhí)行操作介紹
3.1、myAGV跟mechArm的連接
3.2、簡(jiǎn)單的控制(分為鍵盤控制和ps2手柄控制)
3.3、案例的實(shí)現(xiàn):將遠(yuǎn)距離的木塊通過(guò)myAGV進(jìn)行移動(dòng),再通過(guò)mechArm夾爪,夾取木塊來(lái)進(jìn)行整理
正文
1 、介紹
我們這章節(jié)的內(nèi)容是將協(xié)作性機(jī)械臂打破距離上的限制,跟移動(dòng)機(jī)器人(myAGV)相連接,實(shí)現(xiàn)一個(gè)案例。
下面是我們今天要使用的兩個(gè)設(shè)備:
mechArm 270 M5Stack:
mechArm 270-M5Stack,是一款以M5Stack Basic作為主控,支持ROS仿真模擬,是大象機(jī)器人面向創(chuàng)客創(chuàng)新和機(jī)器人產(chǎn)學(xué)研推出的仿工業(yè)構(gòu)型小六軸機(jī)械臂。

myAGV
myAGV 大象首款移動(dòng)機(jī)器人,采用競(jìng)賽級(jí)麥克納姆輪,全包裹金屬車架;ROS開(kāi)發(fā)平臺(tái)內(nèi)置兩種slam算法,滿足建圖、導(dǎo)航方向的學(xué)習(xí);提供豐富的擴(kuò)展接口,可搭載my系列機(jī)械臂。

2、案例內(nèi)容
今天我們要實(shí)現(xiàn)的是mechArm270 M5Stack+myAGV結(jié)合的案例,通過(guò)控制myAGV移動(dòng)到指定的位置,然后控制mechArm270 M5Stack抓取木塊myAGV再移動(dòng)到指定的位置。

3、操作
3.1 連接
要讓兩個(gè)機(jī)器結(jié)合在一起,首先得讓他們建立起聯(lián)系起來(lái)。這里有兩個(gè)建立連接的方法:
無(wú)線連接(TCP/IP)
通過(guò)mechArm 270 M5Stack的IP地址,讓myAGV來(lái)建立聯(lián)系。先將兩個(gè)設(shè)備處于同一的WiFi網(wǎng)絡(luò)環(huán)境下,先獲取mechArm 270 M5Stack的ip地址,大象機(jī)器人在團(tuán)隊(duì)設(shè)計(jì)M5Stack Basic時(shí),已經(jīng)設(shè)計(jì)顯示IP地址的功能,可以很方便的獲取到IP地址。(porty默認(rèn)為9000)

簡(jiǎn)單介紹一下socket方法:在python中用來(lái)建立通信的一個(gè)功能,可以相互發(fā)送信息。
大象機(jī)器人有個(gè)開(kāi)源的庫(kù)pymycobot,里面封裝了一個(gè)MyCobotSocket()的方法,就類似于socket方法,給機(jī)械臂發(fā)送指令。
code:

有線連接
有線連接就相對(duì)來(lái)說(shuō)比較容易了,插上一根typeC數(shù)據(jù)線連接myAGV,就可以進(jìn)行對(duì)機(jī)械臂的控制了。
注意:再連接之后,因?yàn)閁buntu系統(tǒng)的原因,需要給機(jī)械臂的串口賦予權(quán)限才能夠正常的操控。在終端輸入

3.2 簡(jiǎn)單控制
移動(dòng)myAGV
連接好了之后,就可以開(kāi)始進(jìn)行操作了。
在myAGV的移動(dòng)上,大象機(jī)器人給我們提供了兩種控制方式鍵盤控制和ps2控制。
是用ros語(yǔ)言來(lái)進(jìn)行控制的。(下面是操作的方法)
啟動(dòng)節(jié)點(diǎn)

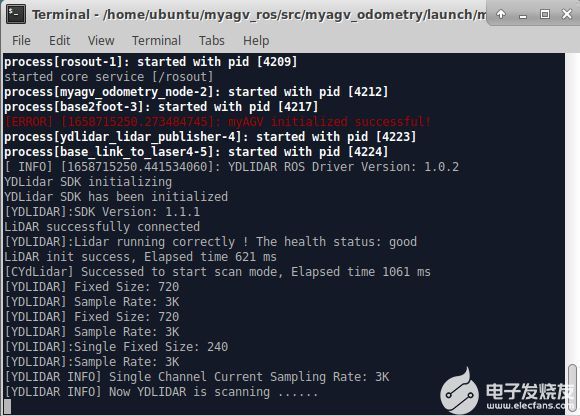
打開(kāi)鍵盤控制界面

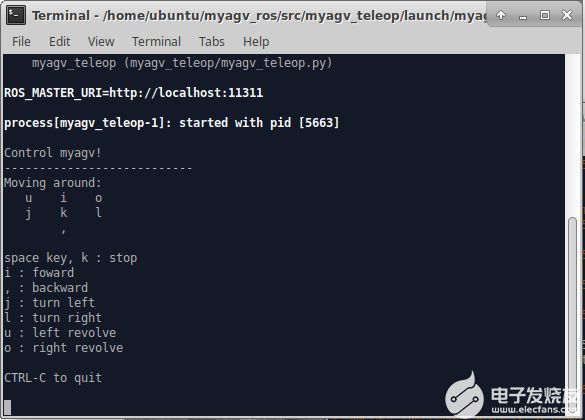
這樣按鍵盤上的對(duì)應(yīng)的按鍵就可以進(jìn)行移動(dòng)了。
myAGV使用的是麥克納姆輪可以全方向運(yùn)動(dòng),還有IMU用于定位補(bǔ)償。可以在原地轉(zhuǎn)圈,操控十分的簡(jiǎn)單。
作為一個(gè)移動(dòng)機(jī)器人得有脫離PC來(lái)操控,還提供了ps2手柄的控制,已經(jīng)內(nèi)置好了程序,我們只需要調(diào)用程序。
第一步還是啟動(dòng)節(jié)點(diǎn),第二部開(kāi)啟ps2手柄的控制程序。

運(yùn)行后就可以通過(guò)ps2手柄自由控制myAGV了。
3.3 案例的實(shí)現(xiàn)
用機(jī)械臂抓取小木塊,來(lái)投入對(duì)應(yīng)的桶里!
結(jié)合移動(dòng)小車的控制和機(jī)械臂的控制,就可以實(shí)現(xiàn)這個(gè)項(xiàng)目了。
先是啟動(dòng)myAGV的移動(dòng)控制,鍵盤控制或者ps2手柄控制都可以。我這邊選擇ps2手柄控制。
將機(jī)械臂移動(dòng)到小木塊前方,給mechArm發(fā)送代碼去控制它運(yùn)動(dòng)和控制夾爪去抓取木塊。放置到對(duì)應(yīng)的位置。
code for mechArm:


不知你對(duì)這個(gè)案例有何看法,如果你有什么想法或者意見(jiàn)請(qǐng)?jiān)谙路搅粞裕∥覀儠?huì)采取有趣的建議進(jìn)行嘗試!
審核編輯 黃昊宇
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29663瀏覽量
212386 -
AGV
+關(guān)注
關(guān)注
27文章
1436瀏覽量
42227 -
機(jī)械臂
+關(guān)注
關(guān)注
13文章
553瀏覽量
25325
發(fā)布評(píng)論請(qǐng)先 登錄
大象機(jī)器人推出移動(dòng)復(fù)合機(jī)器人myAGV Pro
輪式移動(dòng)機(jī)器人電機(jī)驅(qū)動(dòng)系統(tǒng)的研究與開(kāi)發(fā)
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開(kāi)源六軸機(jī)械臂產(chǎn)品

【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】+內(nèi)容初識(shí)
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開(kāi)源六軸機(jī)械臂產(chǎn)品
復(fù)合機(jī)器人是通過(guò)什么導(dǎo)航方式?
復(fù)合機(jī)器人能滿足多少毫米級(jí)的定位?
復(fù)合機(jī)器人抓取精度的影響因素及提升策略
軟通天樞發(fā)布軟通天匯復(fù)合機(jī)器人系列產(chǎn)品
多功能復(fù)合機(jī)器人設(shè)計(jì)方案

2024移動(dòng)機(jī)器人市場(chǎng)風(fēng)云:新玩家批量涌現(xiàn),是挑戰(zhàn)還是機(jī)遇
移動(dòng)機(jī)器人的技術(shù)突破和未來(lái)展望

智能移動(dòng)機(jī)器人

復(fù)合機(jī)器人倉(cāng)庫(kù)搬運(yùn)方案

如何借助恩智浦MCX系列MCU糾錯(cuò)功能,打造可靠安全的移動(dòng)機(jī)器人?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論