") 一種手動(dòng)校準(zhǔn)Livox雷達(dá)和相機(jī)之間外參的方法
一種手動(dòng)校準(zhǔn)Livox雷達(dá)和相機(jī)之間外參的方法

功能包介紹
該功能包提供了一個(gè)手動(dòng)校準(zhǔn)Livox雷達(dá)和相機(jī)之間外參的方法,已經(jīng)在Mid-40,Horizon和Tele-15上進(jìn)行了驗(yàn)證。
其中包含了計(jì)算相機(jī)內(nèi)參,獲得標(biāo)定數(shù)據(jù),優(yōu)化計(jì)算外參和雷達(dá)相機(jī)融合應(yīng)用相關(guān)的代碼。
本方案中使用了標(biāo)定板角點(diǎn)作為標(biāo)定目標(biāo)物,由于Livox雷達(dá)非重復(fù)性掃描的特點(diǎn),點(diǎn)云的密度較大,比較易于找到雷達(dá)點(diǎn)云中角點(diǎn)的準(zhǔn)確位置。
相機(jī)雷達(dá)的標(biāo)定和融合也可以得到不錯(cuò)的結(jié)果。
功能包名稱:livox_camera_lidar_calibration
功能包使用環(huán)境:Ubuntu 64-bit 16.04
使用步驟
采集數(shù)據(jù)
連接雷達(dá)檢查標(biāo)定板角點(diǎn)是否在點(diǎn)云中
輸入點(diǎn)云可視化的命令查看點(diǎn)云
roslaunch livox_ros_driver livox_lidar_rviz.launch
這樣就在rviz中顯示了點(diǎn)云
連接相機(jī)檢查標(biāo)定板角點(diǎn)是否在照片中
打開(kāi)相機(jī),檢查獲取照片的質(zhì)量,并檢查標(biāo)定板角點(diǎn)是否在照片中。具體方法根據(jù)相機(jī)型號(hào)來(lái)了。
采集照片和點(diǎn)云數(shù)據(jù)
拍攝照片運(yùn)行指令錄制點(diǎn)云
roslaunch livox_ros_driver livox_lidar_msg.launchrosbag record /livox/lidar
每個(gè)位置保存一張照片和10s左右的rosbag即可
數(shù)據(jù)采集完成后,將照片放在data/photo文件夾下; 雷達(dá)rosbag放在data/lidar文件夾下
以上步驟數(shù)據(jù)就采集好了,下面進(jìn)行標(biāo)定工作
標(biāo)定角點(diǎn)
設(shè)置相機(jī)內(nèi)參
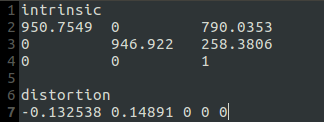
首先需要把得到的內(nèi)參和畸變糾正參數(shù)以下圖的格式保存在data/parameters/intrinsic.txt文件下 。
distortion下面對(duì)應(yīng)5個(gè)畸變糾正參數(shù),按順序是k1和k2 (RadialDistortion),p1和p2 (TangentialDistortion),最后一個(gè)是k3,一般默認(rèn)是0
獲得照片中的角點(diǎn)坐標(biāo)
配置cornerPhoto.launch文件中的照片路徑,運(yùn)行
roslaunch camera_lidar_calibration cornerPhoto.launch
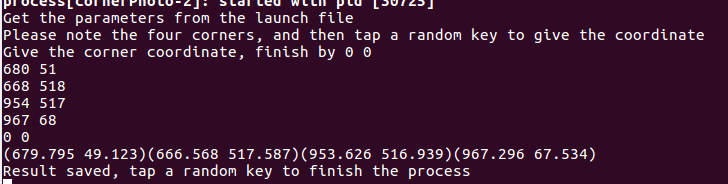
程序會(huì)在UI中打開(kāi)對(duì)應(yīng)的照片。在這個(gè)UI界面上只要把鼠標(biāo)移到標(biāo)定板的各個(gè)角上,窗口左下角就會(huì)顯示對(duì)應(yīng)的坐標(biāo)數(shù)據(jù)。
確定一個(gè)順序,一般從左上角的角點(diǎn)開(kāi)始,逆時(shí)針旋轉(zhuǎn)按順序記錄下四個(gè)角點(diǎn)坐標(biāo)。
記錄完畢后選中顯示的圖片按任意鍵,進(jìn)入坐標(biāo)輸入流程。
把記錄下的四個(gè)坐標(biāo)”x y”按順序輸入,x和y中間要有空格(比如: “635 487”),輸入完成后輸入”0 0”即可結(jié)束輸入流程(如下圖例所示)。
程序會(huì)算出四個(gè)更精確的float類型坐標(biāo)顯示出來(lái),并保存在data/corner_photo.txt中。然后按任意鍵結(jié)束整個(gè)流程。
更改cornerPhoto.launch文件中的照片路徑,重復(fù)上述流程,直至獲得所有照片的角點(diǎn)坐標(biāo)。
獲得雷達(dá)點(diǎn)云中的角點(diǎn)坐標(biāo)
檢查pcdTransfer.launch文件中的rosbag路徑,設(shè)置rosbag的數(shù)量,并將rosbag以0.bag, 1.bag…命名。
運(yùn)行指令將rosbag批量轉(zhuǎn)化成PCD文件,PCD文件默認(rèn)保存在data/pcdFiles文件夾中
roslaunch camera_lidar_calibration pcdTransfer.launch
使用pcl_viewer打開(kāi)PCD文件,按住shift+左鍵點(diǎn)擊即可獲得對(duì)應(yīng)的點(diǎn)坐標(biāo)。注意和照片采用相同的角點(diǎn)順序
pcl_viewer -use_point_picking xx.pcd
將xyz角點(diǎn)坐標(biāo)按如下格式保存在data/corner_lidar.txt中,將所有PCD文件中雷達(dá)點(diǎn)云的角點(diǎn)坐標(biāo)保存下來(lái)。
上面的步驟把相機(jī)和雷達(dá)角點(diǎn)獲得了,也就是同名點(diǎn),下面就是計(jì)算外參了
參數(shù)設(shè)置
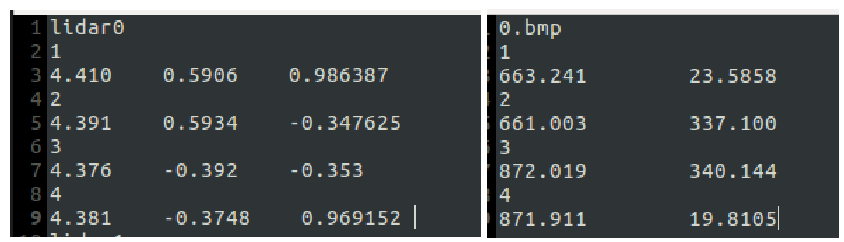
外參計(jì)算節(jié)點(diǎn)會(huì)讀取data/corner_photo.txt和data/corner_lidar.txt中的標(biāo)定數(shù)據(jù)來(lái)計(jì)算外參,數(shù)據(jù)需要保存成特定的格式才能被外參計(jì)算節(jié)點(diǎn)正確讀取。
參考以下格式,每行數(shù)據(jù)只有超過(guò)10個(gè)字母程序才會(huì)將其讀取為計(jì)算的參數(shù),比如下圖用來(lái)編號(hào)的1234,lidar0和0.bmp這些標(biāo)題不會(huì)被讀取為計(jì)算參數(shù)。
程序讀到空行就會(huì)停止讀取參數(shù)開(kāi)始計(jì)算,所以保存時(shí)不要空行。
在計(jì)算前檢查一下雷達(dá)和相機(jī)兩個(gè)標(biāo)定數(shù)據(jù)中是否每行對(duì)應(yīng)的是同一個(gè)角點(diǎn),并檢查數(shù)據(jù)量是否相同
計(jì)算外參
外參計(jì)算getExt1節(jié)點(diǎn)
計(jì)算前在getExt1.launch文件中配置好外參初值
輸入指令開(kāi)始計(jì)算外參
roslaunch camera_lidar_calibration getExt1.launch
終端中可以看到每次迭代運(yùn)算的cost,外參結(jié)果以齊次矩陣的格式保存到data/parameters/extrinsic.txt下。

可以根據(jù)優(yōu)化后的殘差和重投影誤差評(píng)估一下得到的外參,重投影會(huì)把誤差較大的數(shù)據(jù)打印在屏幕上,可以剔除異常標(biāo)定數(shù)據(jù)后再重新進(jìn)行優(yōu)化計(jì)算。
外參計(jì)算getExt2節(jié)點(diǎn)
getExt1節(jié)點(diǎn)只優(yōu)化外參,而getExt2節(jié)點(diǎn)在計(jì)算的時(shí)候會(huì)將一開(kāi)始計(jì)算的內(nèi)參作為初值和外參一起優(yōu)化。
輸入指令程序會(huì)得到一個(gè)新的內(nèi)參和外參,并用新的參數(shù)來(lái)進(jìn)行重投影驗(yàn)證。
roslaunch camera_lidar_calibration getExt2.launch
一般使用getExt1節(jié)點(diǎn)即可,如果在外參初值驗(yàn)證過(guò),并且異常值已經(jīng)剔除后,優(yōu)化還是有較大的殘差,那么可以使用getExt2試一試。
使用的前提需要保證標(biāo)定數(shù)據(jù)量較大,并且要充分驗(yàn)證結(jié)果。
如果經(jīng)過(guò)驗(yàn)證getExt2計(jì)算的結(jié)果確實(shí)更好,那么把新的內(nèi)參更新在data/parameters/intrinsic.txt中
通過(guò)上面步驟已經(jīng)得到了外參的結(jié)果,結(jié)果的優(yōu)略可以通過(guò)下面的驗(yàn)證方法
結(jié)果驗(yàn)證
獲得外參后我們可以用兩個(gè)方式看一下融合的效果。第一個(gè)是將點(diǎn)云投影到照片上,第二個(gè)是點(diǎn)云的著色。
投影點(diǎn)云到照片在projectCloud.launch文件中配置點(diǎn)云和照片的路徑后,運(yùn)行指令,將rosbag中一定數(shù)量的點(diǎn)投影到照片上并且保存成新的照片。
roslaunch camera_lidar_calibration projectCloud.launch
點(diǎn)云著色在colorLidar.launch文件中配置點(diǎn)云和照片的路徑,運(yùn)行指令,可以在rviz中檢查著色的效果。
roslaunch camera_lidar_calibration colorLidar.launch
審核編輯:劉清
-
PCL
+關(guān)注
關(guān)注
1文章
37瀏覽量
13911
原文標(biāo)題:相機(jī)和livox激光雷達(dá)外參標(biāo)定
文章出處:【微信號(hào):3D視覺(jué)工坊,微信公眾號(hào):3D視覺(jué)工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
激光雷達(dá)和相機(jī)之間的外參標(biāo)定
一種基于FPGA的DSU硬件實(shí)現(xiàn)方法
一種自主產(chǎn)生式的雷達(dá)回波模擬器中頻部分的設(shè)計(jì)實(shí)現(xiàn)方法論述
求大佬分享一種基于毫米波雷達(dá)和機(jī)器視覺(jué)的前方車輛檢測(cè)方法
一種不依賴于棋盤格等輔助標(biāo)定物體實(shí)現(xiàn)像素級(jí)相機(jī)和激光雷達(dá)自動(dòng)標(biāo)定的方法
一種基于ADS的雷達(dá)接收機(jī)系統(tǒng)設(shè)計(jì)方法
怎樣進(jìn)行機(jī)器視覺(jué)的像素校準(zhǔn)?
一種自動(dòng)Kinect傳感器外參標(biāo)定方法
3D激光雷達(dá)和相機(jī)校準(zhǔn)是如何考慮傳感器之間誤差的?
激光雷達(dá)相機(jī)外參標(biāo)定相關(guān)內(nèi)容
汽車電子激光雷達(dá)和相機(jī)的自動(dòng)在線外參標(biāo)定技術(shù)

一種基于毫米波雷達(dá)和相機(jī)系統(tǒng)之間的在線無(wú)目標(biāo)校準(zhǔn)方法
基于激光雷達(dá)相機(jī)的在線外部標(biāo)定算法

采集激光雷達(dá)和相機(jī)的初始標(biāo)定數(shù)據(jù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論