 3自由度串聯機械臂實現電磁鐵搬運功能
3自由度串聯機械臂實現電磁鐵搬運功能

1、功能描述
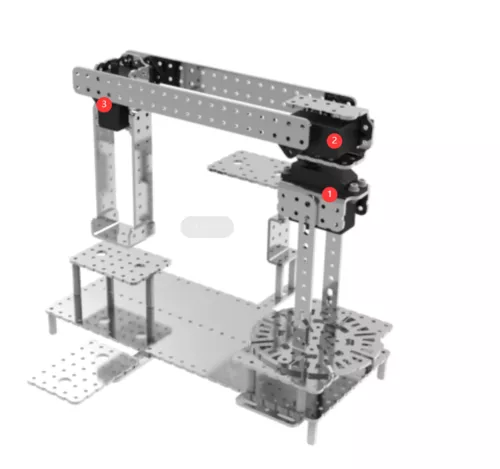
R308樣機是一款擁有3自由度的串聯機械臂。本文提供的示例所實現的功能為:在3自由度串聯機械臂樣機上安裝電磁鐵,實現電磁鐵搬運物品的功能。


2、電子硬件
在這個示例中,我們采用了以下硬件,請大家參考:
| 主控板 | Basra(兼容Arduino Uno) |
| 擴展板 | Bigfish2.1 |
| 舵機 | 270°伺服電機 |
| 電池 | 7.4V鋰電池 |
| 其它 | 電磁鐵、USB線 |
電路連接說明:
注:
① 270°伺服電機連接在Bigfish擴展板D4 . GND . VCC接口上
② 270°伺服電機連接在Bigfish擴展板D7 . GND . VCC接口上
③ 270°伺服電機連接在Bigfish擴展板D11 . GND . VCC接口上
電磁鐵連接在Bigfish擴展板D9,D10接口上
3、運動控制
上位機:Controller 1.0
下位機編程環境:Arduino 1.8.19
3.1初始位置的設定
① 將Controller下位機程序servo_bigfish.ino直接下載到主控板。這段代碼供Controller上位機與主控板通信,并允許調試舵機。代碼如下:
/*------------------------------------------------------------------------------------ 版權說明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 機器譜 2023-01-31 https://www.robotway.com/ ------------------------------ /* * Bigfish擴展板舵機口; 4, 7, 11, 3, 8, 12, 14, 15, 16, 17, 18, 19 * 使用軟件調節舵機時請拖拽對應序號的控制塊 */ #include #define ANGLE_VALUE_MIN 0 #define ANGLE_VALUE_MAX 180 #define PWM_VALUE_MIN 500 #define PWM_VALUE_MAX 2500 #define SERVO_NUM 12 Servo myServo[SERVO_NUM]; int data_array[2] = {0,0}; //servo_pin: data_array[0], servo_value: data_array[1]; int servo_port[SERVO_NUM] = {4, 7, 11, 3, 8, 12, 14, 15, 16, 17, 18, 19}; int servo_value[SERVO_NUM] = {}; String data = ""; boolean dataComplete = false; void setup() { Serial.begin(9600); } void loop() { while(Serial.available()) { int B_flag, P_flag, T_flag; data = Serial.readStringUntil('n'); data.trim(); for(int i=0;i= ANGLE_VALUE_MIN && where <= ANGLE_VALUE_MAX) { myServo[which].write(where); } else if(where >= PWM_VALUE_MIN && where <= PWM_VALUE_MAX) { myServo[which].writeMicroseconds(where); } } int pin2index(int _pin){ int index; switch(_pin) { case 4: index = 0; break; case 7: index = 1; break; case 11: index = 2; break; case 3: index = 3; break; case 8: index = 4; break; case 12: index = 5; break; case 14: index = 6; break; case 15: index = 7; break; case 16: index = 8; break; case 17: index = 9; break; case 18: index = 10; break; case 19: index = 11; break; } return index; }
下載完成后,保持主控板和電腦的USB連接,以便利用上位機進行調試。
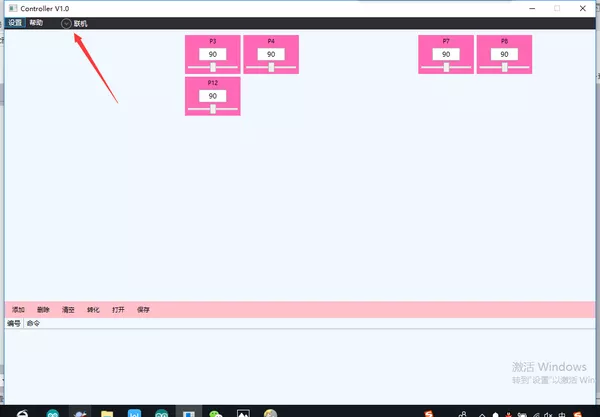
② 雙擊打開Controller 1.0b.exe:

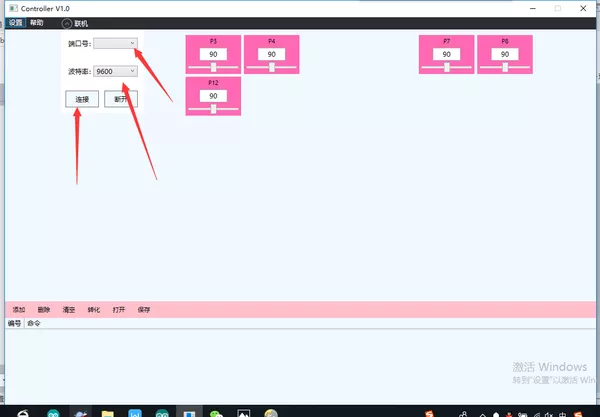
③ 界面左上角選擇:設置-面板設置,彈出需要顯示的調試塊,可通過勾選隱藏不需要調試的舵機塊:聯機-選擇主控板對應端口號以及波特率。
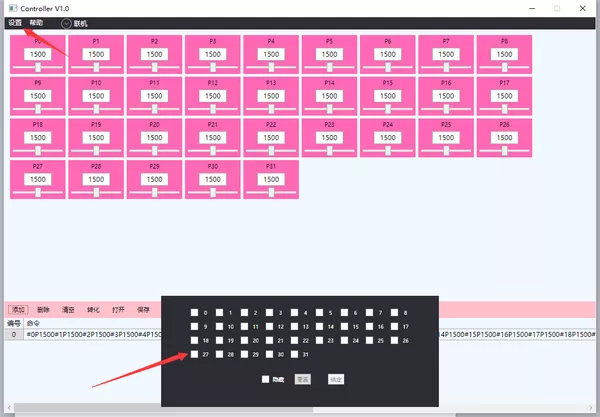
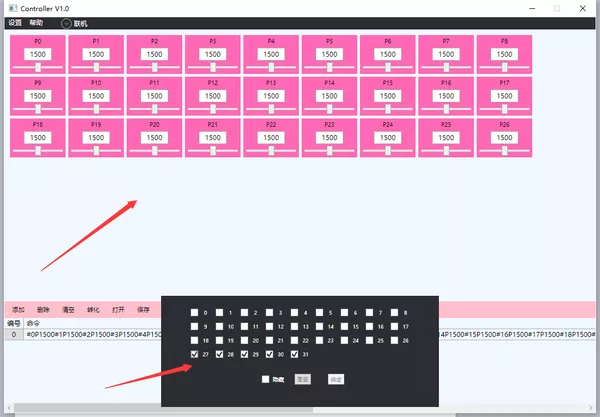
④ 拖動進度條,可以觀察相應的舵機角度轉動。寫好對應的舵機調試角度,勾選左下角添加-轉化,獲得舵機調試的數組:
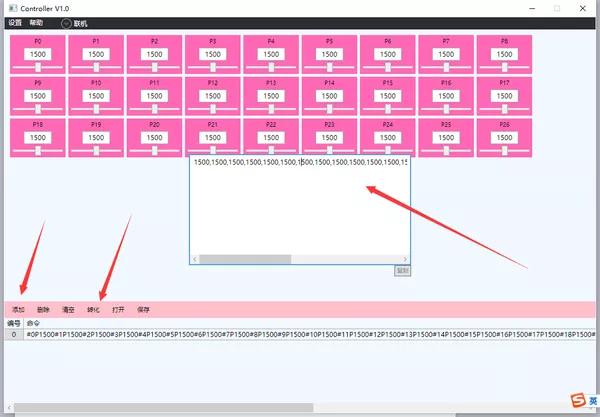
⑤ 將該數組直接復制到相應的Arduino程序中的get_coordinate()部分進行使用。
3.2調試好角度后將電磁鐵搬運例程(calculate_angle_test.ino)下載到主控板【程序源碼詳見 https://www.robotway.com/h-col-191.html】
/*------------------------------------------------------------------------------------
版權說明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 機器譜 2023-01-31 https://www.robotway.com/
------------------------------*/
#include
#include
#define SERVO_SPEED 3460 //定義舵機轉動快慢的時間
#define ACTION_DELAY 200 //定義所有舵機每個狀態時間間隔
#define L1 172
#define L2 160
#define L3 135
Servo myServo[6];
int f = 200; //定義舵機每個狀態間轉動的次數,以此來確定每個舵機每次轉動的角度
int servo_port[6] = {4,7,11,3,8,12}; //定義舵機引腳
int servo_num = sizeof(servo_port) / sizeof(servo_port[0]); //定義舵機數量
float value_init[6] = {1500, 1500, 1500, 0, 0, 0}; //定義舵機初始角度
double theta[3] = {};
float value_pwm[6] = {};
float coordinate[3] = {};
int data_num;
boolean dataComplete = false;
void setup() {
Serial.begin(9600);
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
for(int i=0;i= 0){
theta[0] = theta0 * 180 / PI;
}
else
{
theta[0] = 180 + theta0 * 180 / PI;
}
theta[1] = 90 - theta1 * 180 / PI;
theta[2] = theta2 * 180 / PI;
// Serial.print("theta0 = ");
// Serial.println(theta[0]);
// Serial.print("theta1 = ");
// Serial.println(theta[1]);
// Serial.print("theta2 = ");
// Serial.println(theta[2]);
// Serial.println("-------------------------------------");
}
void ServoStart(int which)
{
if(!myServo[which].attached())myServo[which].attach(servo_port[which]);
pinMode(servo_port[which], OUTPUT);
}
void ServoStop(int which)
{
myServo[which].detach();
digitalWrite(servo_port[which],LOW);
}
void ServoGo(int which , int where)
{
if(where!=200)
{
if(where==201) ServoStop(which);
else
{
ServoStart(which);
myServo[which].writeMicroseconds(where);
}
}
}
void servo_move(float value0, float value1, float value2, float value3, float value4, float value5)
{
float value_arguments[] = {value0, value1, value2, value3, value4, value5};
float value_delta[servo_num];
for(int i=0;i
審核編輯黃宇
-
機器人
+關注
關注
213文章
29664瀏覽量
212452 -
Arduino
+關注
關注
189文章
6497瀏覽量
190632 -
機械臂
+關注
關注
13文章
553瀏覽量
25330
發布評論請先 登錄
人形機器人“靈巧手”,正在接近27個自由度的人手

十字形多自由度超聲電機接觸分析模型研究
Lake Shore 643電磁鐵電源無法開機深度維修案例剖析與解決方案

大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
上升沿時間在10ns以內的電磁鐵驅動電路請教

完美CP來啦!當AGV遇上機械臂!
深度解析!RK3568 加持機械臂是如何實現顏色識別與抓取的?

RK3568國產實驗箱+人工智能機械臂:跳舞、疊羅漢、夾方塊、積木搬運案例全解!
H60.XYZTR5六自由度并聯機構

機械臂的高效運作,連接器起關鍵作用
鐵芯長短與電磁鐵磁力大小的關系
OrangePi AIpro應用:機械臂應用開發指南






 工商網監
工商網監
評論