") 功能實(shí)用|編輯簡(jiǎn)單|CRT直坐標(biāo)機(jī)器人示教編程案例
功能實(shí)用|編輯簡(jiǎn)單|CRT直坐標(biāo)機(jī)器人示教編程案例

CRT-DMC630MF三軸桁架機(jī)械手示教系統(tǒng)是基于三軸運(yùn)動(dòng)控制器DMC630M的硬件平臺(tái),在公司三軸仿形示教系統(tǒng)成熟的技術(shù)和廣泛的市場(chǎng)應(yīng)用的基礎(chǔ)上,根據(jù)市場(chǎng)需求,采納了廣大客戶的寶貴意見,并參考國(guó)內(nèi)外高端同類產(chǎn)品的一些功能及優(yōu)點(diǎn),經(jīng)深圳市科瑞特自動(dòng)化全體同仁的共同努力,推出的一款功能齊全、使用方便靈活的高端運(yùn)動(dòng)控制系統(tǒng)。
例程要求:如圖1所示:圖中立方體為障礙物,加工點(diǎn)不能與之觸碰,P1點(diǎn)為取料點(diǎn),P2點(diǎn)位放料點(diǎn),首先移動(dòng)到P1點(diǎn),取料(OT1為1),延時(shí)1000ms,檢測(cè)是否取到料(IN16),若沒有取到料(IN16有效)發(fā)出報(bào)警信號(hào)(OT3),直到解除報(bào)警(IN17有效),取到料后抬高到安全位(P3),移動(dòng)到P4,再移動(dòng)到放料點(diǎn)P2,放料(OT1為0),移動(dòng)到P4,移動(dòng)到P3,檢測(cè)是否還要取料(IN18),如果IN18有效,移動(dòng)到P1重復(fù)之前動(dòng)作,如果IN18無效,回原點(diǎn)P5。
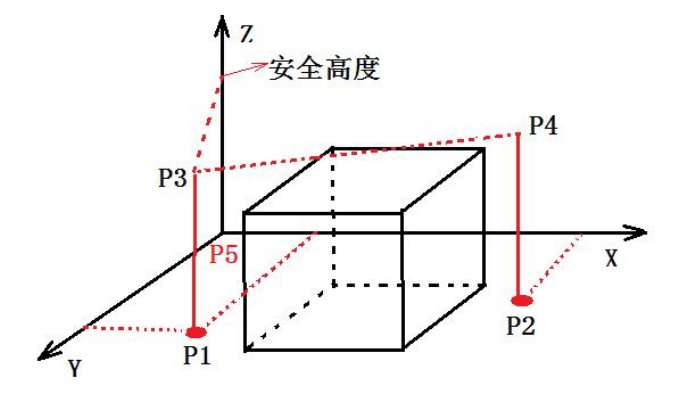 圖1
圖1操作步驟如下:
1.用戶登錄。
2.設(shè)置當(dāng)前工件序號(hào)。
3.設(shè)計(jì)工藝流程:根據(jù)例程要求設(shè)計(jì)工藝流程,具體流程如圖2所示。
4.編輯工藝程序:根據(jù)工藝流程編輯工藝程序 ,具體的圖元指令以及指令對(duì)應(yīng)的參數(shù)如 圖3所示
5.軌跡采集:按照上一個(gè)例程的方法,分別采集點(diǎn)1~5的坐標(biāo)信息。
6.運(yùn)行驗(yàn)證:返回到“模式選擇”界面,按“3”進(jìn)入“運(yùn)行模式”界面,按“F1”運(yùn)行,然后按控制器上連接的運(yùn)行按鈕,觀察運(yùn)行結(jié)果。
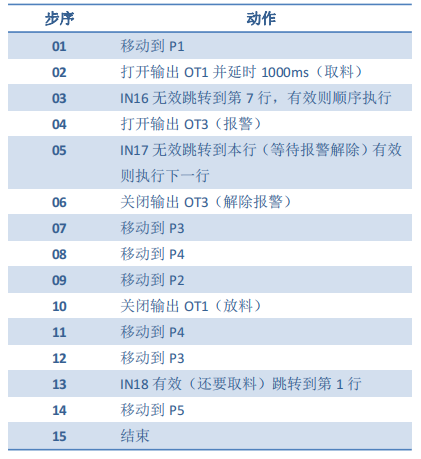 圖2
圖2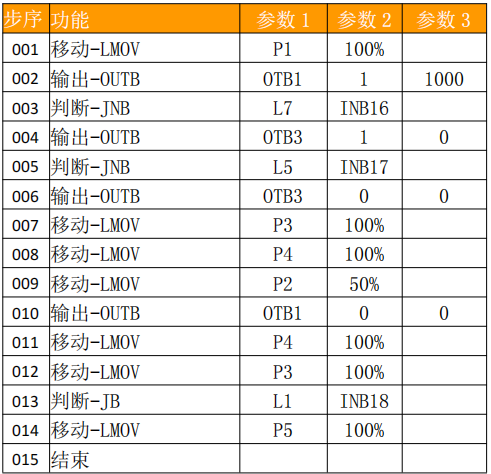 圖3
圖3 直坐標(biāo)機(jī)器人控制系統(tǒng)
直坐標(biāo)機(jī)器人控制系統(tǒng)專業(yè)提供工業(yè)自動(dòng)化運(yùn)動(dòng)控制技術(shù)及解決方案!
---(激光)焊接、拋光、切割、桁架機(jī)械手、等特種數(shù)控設(shè)備運(yùn)動(dòng)控制系統(tǒng)。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29664瀏覽量
212470
發(fā)布評(píng)論請(qǐng)先 登錄
人形機(jī)器人背后的“靈魂導(dǎo)師”:工程師示教的價(jià)值與富唯智能的實(shí)踐

大象機(jī)器人推出移動(dòng)復(fù)合機(jī)器人myAGV Pro
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門的引路書
智能拖動(dòng)示教噴涂機(jī)器人:技術(shù)革新與未來展望

歐姆龍協(xié)作機(jī)器人TM25S可使用多種方法進(jìn)行編程

三分鐘讓你明白拖動(dòng)示教噴涂機(jī)器移動(dòng)速度是多少
示教器的革新:無線連接,無限可能

什么是拖動(dòng)示教?機(jī)器人拖動(dòng)示教方式分析

協(xié)作機(jī)器人拽拖示教詳解
基于導(dǎo)納控制的機(jī)器人拖動(dòng)示教原理和實(shí)現(xiàn)步驟
焊接機(jī)器人示教模式怎么設(shè)置

工業(yè)機(jī)器人示教器按鈕功能介紹
工業(yè)機(jī)器人常用的編程方式
工業(yè)機(jī)器人的四種編程(示教編程、離線編程、自增強(qiáng)現(xiàn)實(shí)編程主編程)剖析!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論