 RK3568開發板SG90 舵機模塊的功能實現
RK3568開發板SG90 舵機模塊的功能實現

1 模塊說明
SG90 舵機模塊如下圖所示:
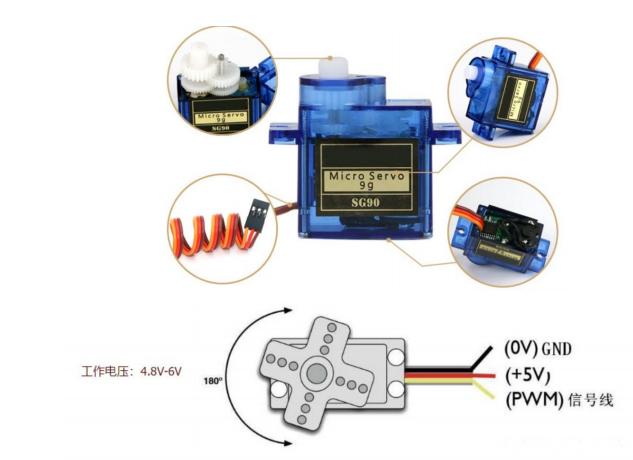
常見的舵機轉向角度有 0-90 度,0-180 度,0-360 度,可以用在垃圾桶項目開蓋用,智能小車的全比例轉向,攝像頭云臺,機械臂等。
2 接線說明
SG90 舵機模塊上三條線,三條線定義如下:
棕線:GND
紅線:VCC 4.8V-7.2V
黃線:脈沖輸入
3 程序測試
驅動模塊在網盤資料“iTOP-3568 開發板\02_【iTOP-RK3568 開發板】開發資料\09_系統外設功能測試\06_V1.7 底版外設快速測試資料\13_SG90 舵機(90 度)模塊\03_驅動模塊”目錄下下載。
首先將 pwm-SG90.ko 驅動模塊拷貝到開發板的根目錄,然后輸入“insmod pwm-SG90.ko” 命令加載驅動模塊, 然后使用命令“ls /dev/sg90”進行設備節點的查看,
然后下載網盤資料“iTOP-3568 開發板\02_【iTOP-RK3568 開發板】開發資料\09_系統外設功能測試\06_V1.7 底版外設快速測試資料\13_SG90 舵機(90 度)模塊\04_測試程序”下的測試程序。將 sg90_test 可執行文件拷貝到開發板的根目錄下如下圖所示:
sg90 節點就是 SG90 舵機的設備節點文件,然后使用命令“./sg90_test 角度”運行 SG90 舵機模塊的測試程序,
./sg90_test 90
./sg90_test 180
./sg90_test 45
會發現舵機會轉相應的角度。

聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
模塊
+關注
關注
7文章
2786瀏覽量
50132 -
驅動
+關注
關注
12文章
1913瀏覽量
86783 -
開發板
+關注
關注
25文章
5644瀏覽量
103915 -
舵機
+關注
關注
17文章
298瀏覽量
41865
發布評論請先 登錄
相關推薦
熱點推薦
一文掌握RK3568開發板Android13掛載Windows共享目錄
在物聯網和邊緣計算場景中,開發板與PC端的高效文件交互尤為重要。現以iTOP-RK3568開發板為例,詳細演示Android13系統如何通過CIFS協議掛載Windows共享目錄,實現
RK3568開發板教程:以iTOP-RK3568開發板為例 Android13通過CIFS協議掛載Windows共享目錄
開發板與PC端的高效文件交互尤為重要。現以iTOP-RK3568開發板為例,詳細演示Android13系統如何通過CIFS協議掛載Windows共享目錄,實現
北京迅為RK3568開發板OpenHarmony系統南向驅動開發內核HDF驅動框架架構
北京迅為RK3568開發板OpenHarmony系統南向驅動開發內核HDF驅動框架架構

[迅為RK3568開發板]非科班也能玩轉Android應用,體驗QT跨平臺能力
[迅為RK3568開發板]非科班也能玩轉Android應用,體驗QT跨平臺能力
![[迅為<b class='flag-5'>RK3568</b><b class='flag-5'>開發板</b>]非科班也能玩轉Android應用,體驗QT跨平臺能力](https://file1.elecfans.com/web3/M00/02/F1/wKgZO2diirGAPoENAACpt0CV3xc346.png)
RK3568內置MCU開發介紹之一
A55(下文簡稱AP)和1個RISCV(下文簡稱MCU)。 硬件準備 首先介紹一下硬件。主板為風火輪科技的YY3568開發板,主控RK3568。此開發板的相關介紹可以參考 https


能力再次提升! 迅為RK3588/RK3568開發板&amp;核心板新增定制分區鏡像
能力再次提升! 迅為RK3588/RK3568開發板&核心板新增定制分區鏡像






 工商網監
工商網監
評論