") SLAM激光導(dǎo)航搭配末端3D視覺相機(jī)定位, 1+1>2
SLAM激光導(dǎo)航搭配末端3D視覺相機(jī)定位, 1+1>2

當(dāng)我們談?wù)撊找鏌衢T的工業(yè)4.0、智能制造這些話題時(shí),機(jī)器人是一個(gè)無論如何也繞不開的問題。機(jī)器人的智能化程度影響著整個(gè)工業(yè)演化的進(jìn)程,傳統(tǒng)的機(jī)器人僅能在嚴(yán)格定義的結(jié)構(gòu)化環(huán)境中執(zhí)行預(yù)定指令動(dòng)作,在部分行業(yè)實(shí)際應(yīng)用中,無法突破環(huán)境局限,使得末端定位精準(zhǔn)度無法達(dá)到預(yù)期要求,這極大地限制了機(jī)器人的應(yīng)用與發(fā)展。
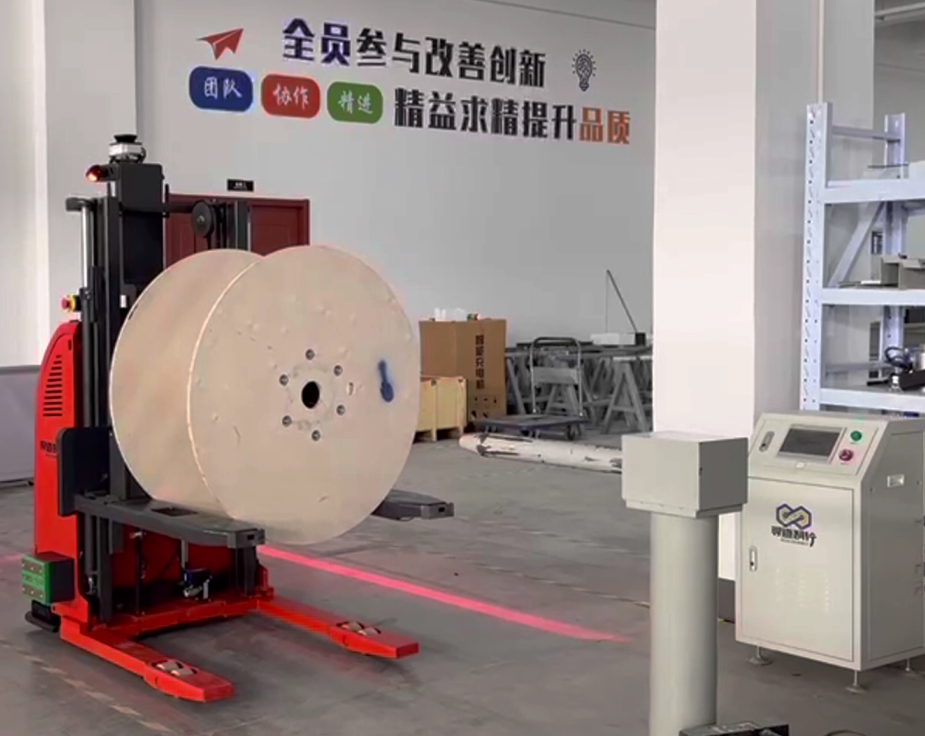
此次尋跡智行在給客戶的解決方案中將SLAM激光導(dǎo)航系統(tǒng)與3D視覺相機(jī)末端定位結(jié)合,解決了實(shí)際應(yīng)用中貨品存放取精度要求高、環(huán)境復(fù)雜的難題。
客戶需求:
1、線纜盤放置架對(duì)接線纜盤取放
2、末端精準(zhǔn)度正負(fù)5mm
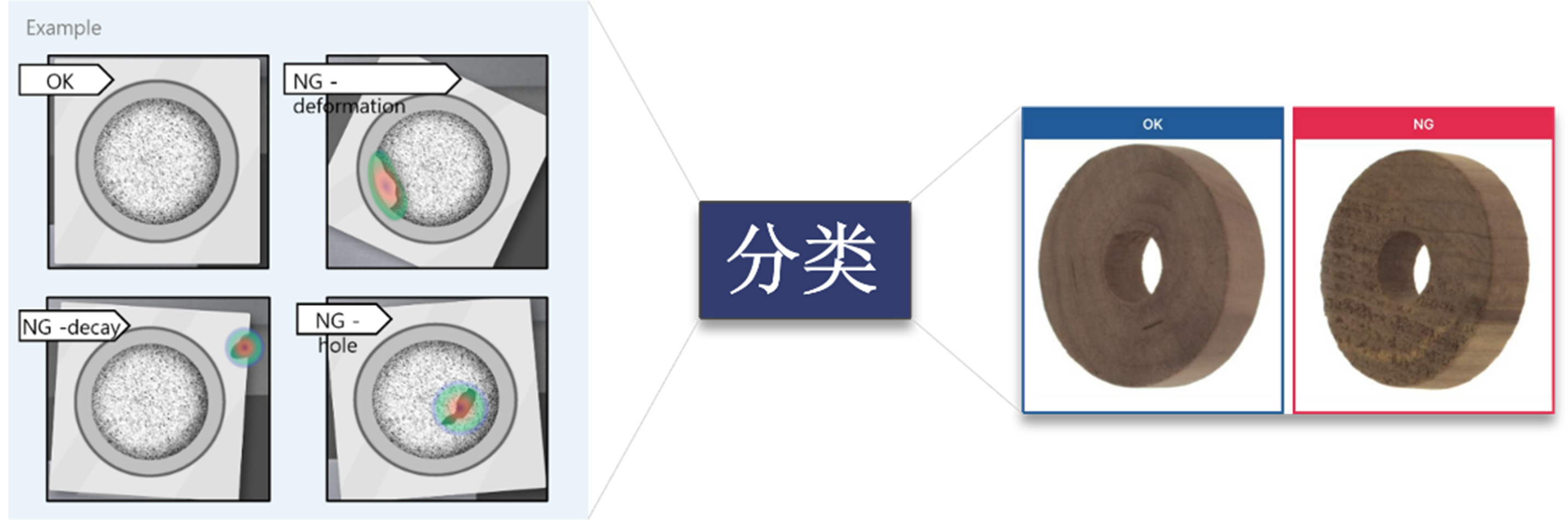
3、角度偏離自動(dòng)清除誤差,精準(zhǔn)對(duì)接
解決方案:
1、L12C車體+定制化超寬貨叉
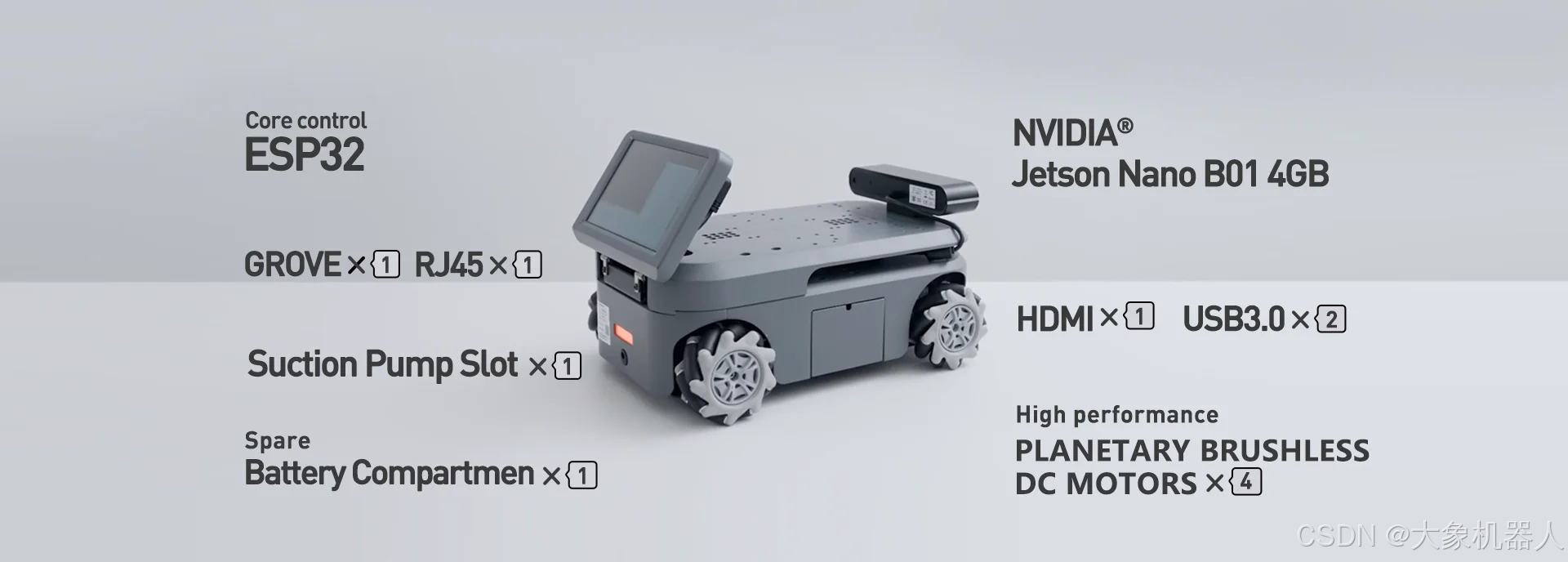
2、SLAM激光導(dǎo)航運(yùn)動(dòng)系統(tǒng)+3D視覺相機(jī)末端定位
3、RMS自研調(diào)度系統(tǒng)
客戶效益:
1、解決了線纜放置架與線纜盤對(duì)接口直徑過小,人工對(duì)接難度大的問題
2、保障生產(chǎn)安全,杜絕滿載搬運(yùn)的安全風(fēng)險(xiǎn)
3、生產(chǎn)節(jié)拍準(zhǔn)點(diǎn)率提高60%,大大提高生產(chǎn)效率
4、人工放置偏離,通過此方案3D視覺相機(jī)掃圖自動(dòng)校準(zhǔn),清除誤差,保障搬運(yùn)的精準(zhǔn)度
尋跡智行機(jī)器人以技術(shù)為驅(qū)動(dòng),不斷提升自研核心硬件&算法,引領(lǐng)百業(yè)應(yīng)對(duì)多種復(fù)雜場(chǎng)景,幫助工廠實(shí)現(xiàn)從倉儲(chǔ)物流到生產(chǎn)物流各環(huán)節(jié)物料的高效周轉(zhuǎn),為企業(yè)降本增效。
截至目前,眾多行業(yè)巨擘基于尋跡機(jī)器人在智能物流場(chǎng)景、方案和技術(shù)上的創(chuàng)新成績,選擇與尋跡智行機(jī)器人展開深度合作,共同推進(jìn)智能物流不斷發(fā)展,譜寫搬運(yùn)機(jī)器人應(yīng)用新明天~
審核編輯 黃宇
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29615瀏覽量
212199 -
激光
+關(guān)注
關(guān)注
20文章
3449瀏覽量
66029 -
3D
+關(guān)注
關(guān)注
9文章
2956瀏覽量
110473 -
SLAM
+關(guān)注
關(guān)注
24文章
438瀏覽量
32423 -
AGV
+關(guān)注
關(guān)注
27文章
1435瀏覽量
42167
發(fā)布評(píng)論請(qǐng)先 登錄
遷移科技推出全新3D智能相機(jī)

【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】視覺實(shí)現(xiàn)的基礎(chǔ)算法的應(yīng)用
3D視覺相機(jī)遇到臟污怎么預(yù)防?富唯智能以創(chuàng)新技術(shù)守護(hù)工業(yè)“慧眼”

【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】+ROS2應(yīng)用案例
對(duì)于結(jié)構(gòu)光測(cè)量、3D視覺的應(yīng)用,使用100%offset的lightcrafter是否能用于點(diǎn)云生成的應(yīng)用?
多維精密測(cè)量:半導(dǎo)體微型器件的2D&3D視覺方案
禾賽科技推出面向機(jī)器人領(lǐng)域的迷你3D激光雷達(dá)
激光雷達(dá)在SLAM算法中的應(yīng)用綜述

AGV激光導(dǎo)航定位技術(shù)與構(gòu)建地圖

使用myAGV、Jetson Nano主板和3D攝像頭,實(shí)現(xiàn)了RTAB-Map的三維建圖功能!
技術(shù)指南丨深視智能3D相機(jī)上下對(duì)射測(cè)厚操作流程


深視智能3D輪廓線掃相機(jī)對(duì)射測(cè)量紐扣電池厚度#傳感器 #3D相機(jī) #視覺傳感器 #粗糙度輪廓測(cè)量





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論