") 江智送物機(jī)器人=AGV+物料數(shù)字關(guān)系系統(tǒng)
江智送物機(jī)器人=AGV+物料數(shù)字關(guān)系系統(tǒng)

1設(shè)計(jì)思想:
重點(diǎn)解決中小型工廠自身?xiàng)l件所決定的用工越來(lái)越難(不愿進(jìn)中小型工廠以及人工成本不斷增高)以及綜合管理效力難以提升(主要是人員管理成本)環(huán)節(jié)中物料周轉(zhuǎn)仍以人力+手推車/叉車方式,而現(xiàn)有AGV產(chǎn)品系列(主要是針對(duì)大型工廠)又不適合中小微工廠使用的痛點(diǎn)(價(jià)格高/使用環(huán)境必須規(guī)范/操作使用要求相對(duì)復(fù)雜較高/產(chǎn)品規(guī)格偏大型/具體使用偏專業(yè)化,其使用靈活性相對(duì)較低)。而中小微工廠其數(shù)量以及整體貢獻(xiàn)度也是國(guó)民經(jīng)濟(jì)主要的擔(dān)當(dāng)。特此基于中小微工廠的實(shí)際現(xiàn)狀,本著降本增效持續(xù)發(fā)展的原則,開發(fā)出如下最大載重200KG與100KG規(guī)格的具有AGV+物料數(shù)字管理系統(tǒng)功能的送物機(jī)器人。
2機(jī)器人型號(hào)/造型
JZR200SW / JZR100SW


3 基本尺寸參數(shù)及主要性能
外形尺寸:900×580X360 mm
主控屏(雙屏): 7(機(jī)器人本體后部)分辯率1024X600 /10.1寸(機(jī)器人前部立桿支架)觸摸 分辨率1280X800
行駛速度:0.3~1.2 m/s,多級(jí)可調(diào),最大1.5m/s
定位精度:±5 cm
通過寬度:≥600 mm
最小轉(zhuǎn)彎半徑: 0
爬坡能力: ≤10°
越障能力: 1.5cm
凈重: 55KG /45KG
承載200KG /100KG
承載工作臺(tái)規(guī)格:630X540 mm
通訊: Wi-Fi 4G/ 5G (正在升級(jí) 后續(xù)可免費(fèi)升級(jí))
主系統(tǒng):
安卓9.0系統(tǒng) RK3399Pro(6+64G )或RK3588-AioT主板
底盤:
型號(hào):C900200/從C900100
驅(qū)動(dòng)系統(tǒng):6.5寸雙電機(jī)驅(qū)動(dòng)輪+前后各2個(gè)3寸萬(wàn)向從動(dòng)輪
主要功能:
采用激光雷達(dá)+前5超聲波組合方案自主導(dǎo)航避障路徑規(guī)劃定位等。實(shí)現(xiàn)自由可控的前進(jìn) /后退 /左轉(zhuǎn)/右轉(zhuǎn)等主要功能。
人機(jī)語(yǔ)音交互功能:
采用4嘜+6W4歐全頻雙喇叭+江智JZAIUI語(yǔ)音交互APP實(shí)現(xiàn)物料周轉(zhuǎn)環(huán)節(jié)必要的人機(jī)交互,提高整體運(yùn)營(yíng)效力等。
視覺識(shí)別功能:
采用500W高清寬動(dòng)態(tài)攝像頭+視覺識(shí)別功能模塊(人臉識(shí)別與物料識(shí)別)結(jié)合人機(jī)語(yǔ)音交互功能來(lái)提高整體便利的運(yùn)營(yíng)效率等。
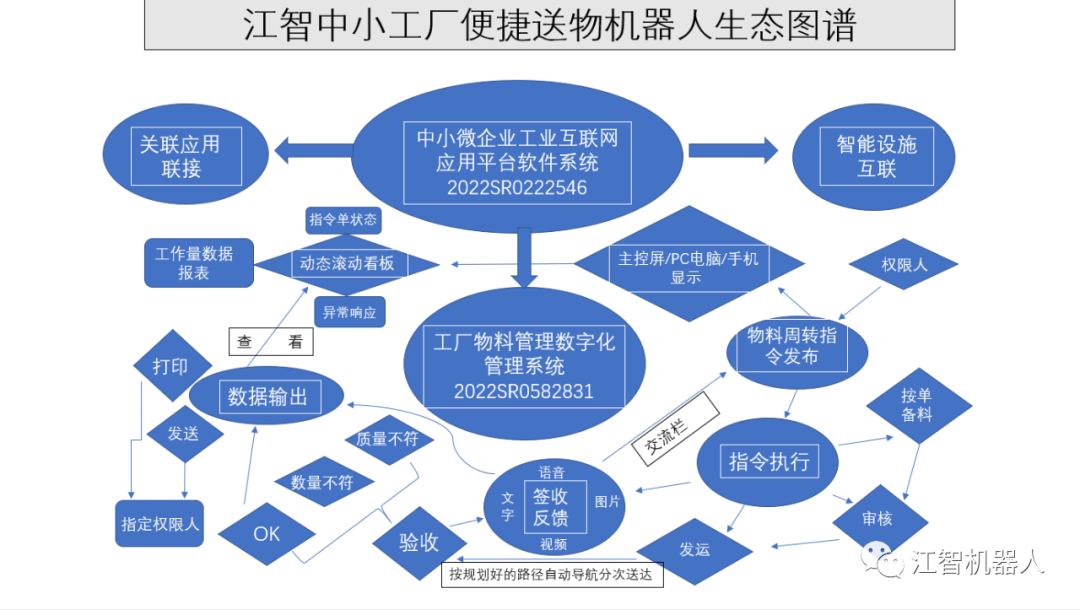
工業(yè)互聯(lián)網(wǎng)下的數(shù)字化智慧化的物料周轉(zhuǎn)管理系統(tǒng)平臺(tái)
重點(diǎn)要體現(xiàn):工業(yè)互聯(lián)網(wǎng)+數(shù)字化+智慧化+實(shí)用性+可靠性+便利性。具體要求見附件
電池: 24V/55AH--48V/55Ah鋰電池
待機(jī)時(shí)間:40h
續(xù)航時(shí)間:6-8h
充電時(shí)間:2-3h
工作噪音:≤50 dB
充電樁參數(shù):
外形尺寸: 360×120×280 mm
輸入電壓: 100-240 V,50-60 Hz
輸出電壓: 25.2 V/48V
輸入電流: 20A
功率: 500W
凈重: 4KG
工作溫度: -10~40℃
安全功能: 感應(yīng)式防觸電保護(hù)
4主要特點(diǎn)(便捷AGV+物料智能管理系統(tǒng))
4.1物料室內(nèi)便捷周轉(zhuǎn)硬件載體
4.2工作臺(tái)上進(jìn)行了適應(yīng)不同物料周轉(zhuǎn)的便捷安裝設(shè)計(jì)。可以是物料原有包裝箱,也可以是工廠在用的成品或半成品零部件專用工位器具等。可保證中小工廠AGV多用性的需要,減少工廠的實(shí)際投入。
4.3 按事先規(guī)劃好的路徑點(diǎn)到點(diǎn)(單點(diǎn)或多點(diǎn))的自動(dòng)行駛(可自動(dòng)避障);其運(yùn)行速度可調(diào),最大可達(dá)1.5M/S ,其效率高達(dá)人力的3倍左右。即提高了功效,又減少了人力投入。
4.4 操作便捷 現(xiàn)有員工稍加培訓(xùn)就完全可按照操作維護(hù)作業(yè)指導(dǎo)書熟練使用(手機(jī)端/主控屏/電腦)。
4.5 高性價(jià)比(建議終端價(jià)5萬(wàn)8/4萬(wàn)8)。
4.6 便捷AGV運(yùn)行控制+物料周轉(zhuǎn)數(shù)字智能管理系統(tǒng)平臺(tái)(若不需要,則外減1200元)
4.7 AGV運(yùn)行控制系統(tǒng)(電腦/主控屏與手機(jī)端)
通過激光導(dǎo)航超聲波避障SLAM算法等可按事先掃描定位建好的路徑規(guī)劃,讓6.5寸雙電機(jī)控制系統(tǒng)進(jìn)行前進(jìn) 轉(zhuǎn)向 停止等動(dòng)作。
4.8 物料周轉(zhuǎn)管理系統(tǒng)(電腦/主控屏與手機(jī)端)
4.9 點(diǎn)擊系統(tǒng)軟件時(shí),無(wú)論是發(fā)料或收料人員,均需身份驗(yàn)證(人臉識(shí)別/手機(jī)/操作員密碼)才能跳出發(fā)料/接收界面。
4.10 發(fā)料方可根據(jù)系統(tǒng)中已有的發(fā)料指令或工廠授權(quán)人的發(fā)料文件進(jìn)行(一旦發(fā)料員自行錄入新的發(fā)料明細(xì)后,則此信息會(huì)被自動(dòng)保存中)
4.11 所發(fā)的物料狀態(tài),發(fā)料人在錄入物料明細(xì)以及將所發(fā)物料放入便捷AGV中后,則需要手機(jī)拍照上傳到軟件系統(tǒng)中,然后操作到指定位置。
4.12便捷AGV 已到啟動(dòng)執(zhí)行指令,則所發(fā)物料明細(xì)以及拍照狀態(tài)圖片就顯示到屏的界面上;同時(shí)收料人(手機(jī)或收料方電腦)也會(huì)收到該指令。
4.13 便捷AGV到達(dá)位置后,會(huì)語(yǔ)音告知”請(qǐng)接受xx物料“,此時(shí)收料方也會(huì)收到到達(dá)信息提醒。
4.14 物料收發(fā)界面上收料人,先需點(diǎn)擊通過收料數(shù)字碼確認(rèn)身份,通過后才可核對(duì)物料清單取下物料 并確認(rèn)返回等(沒有經(jīng)過收料碼驗(yàn)證,點(diǎn)擊確認(rèn)收料是不起作用的)。
4.15 系統(tǒng)會(huì)實(shí)時(shí)自動(dòng)生成物料周轉(zhuǎn)明細(xì)表,發(fā)送到權(quán)限人手機(jī)或提供權(quán)限人去查看。
附《中小型工廠物料周轉(zhuǎn)智慧管理軟件系統(tǒng)主要功能說明》
中小型工廠物料周轉(zhuǎn)智慧管理軟件系統(tǒng)主要功能說明
1宗旨 主要是基于中小型工廠實(shí)際狀況,結(jié)合點(diǎn)對(duì)點(diǎn)按設(shè)置好得路徑規(guī)劃可自動(dòng)導(dǎo)航避障功能得AGV車控制運(yùn)行軟件基礎(chǔ)上,無(wú)縫化融合物料周轉(zhuǎn)數(shù)字化智慧管理功能。
2具體主要功能描述
2.1基本說明
2.1.1關(guān)于工廠內(nèi)物料庫(kù)模板內(nèi)容需要各個(gè)工廠自行添加修改建立。此物料庫(kù)模板內(nèi)容是需要設(shè)立權(quán)限的。模板格式(格式可以改 內(nèi)容按此要求)如下:
XXXX公司物料數(shù)據(jù)庫(kù)模板(編碼)
XXXX公司物料數(shù)據(jù)庫(kù)模板(編碼)
時(shí)間 | 物料名稱 | 代碼 | 單位 | 狀態(tài) | 數(shù)量/重量 | 存放點(diǎn) | 備注 |
時(shí)間—年 月 日 時(shí) 分
物料名稱:不僅指產(chǎn)品零部件,而且也包括半成品 原材料以及包裝箱等。
狀態(tài):主要是指 主要屬性特征等:如顏色 合格 /不合格等;具體由各工廠根據(jù)實(shí)際自行設(shè)置
備注:主要就前面無(wú)法描述清楚或新的要求的內(nèi)容
2.1.2 物料周轉(zhuǎn)指令單模板
XXXX公司物料周轉(zhuǎn)指令單(編碼)
單號(hào) | 用途 | |||||
具體內(nèi)容 | 從XXXX調(diào)撥到XXXX | 完成時(shí)間 | ||||
編制 | 審批 | |||||
序號(hào) | 物料名稱 | 代碼 | 單位 | 狀態(tài) | 數(shù)量/重量 | 備注 |
實(shí)際完成 | ||||||
執(zhí)行人 | 實(shí)際完成時(shí)間 | |||||
收貨人 | 實(shí)際收到時(shí)間 | |||||
備注 | ||||||
單號(hào) -- 自動(dòng)生成
用途 -- 手工錄入或語(yǔ)音輸入
具體內(nèi)容--手工錄入或語(yǔ)音輸入
完成時(shí)間--手工錄入或語(yǔ)音輸入
編制/審核--下拉單擊確認(rèn)
具體物料---從《物料數(shù)據(jù)庫(kù)》下拉單擊
執(zhí)行人/收貨人---手工錄入或語(yǔ)音輸入
實(shí)際完成時(shí)間/實(shí)際收到時(shí)間---點(diǎn)擊自動(dòng)生成(人臉識(shí)別/收貨碼輸入確認(rèn))
2.1.3 物料周轉(zhuǎn)統(tǒng)計(jì)報(bào)表模板
XXXX公司送物機(jī)器人物料實(shí)際周轉(zhuǎn)報(bào)表(編碼)
時(shí)間段: 年 月 日----年 月 日
序號(hào) | 物料名稱 | 單位 | 狀態(tài) | 數(shù)量/重量 | 從XX點(diǎn)-到XX點(diǎn) | 完成情況 | 備注 |
從報(bào)表生成模塊(此操作也需要權(quán)限)輸入時(shí)間段, 則自動(dòng)生成此表—可查看/可通過企業(yè)微信/權(quán)限QQ/權(quán)限郵箱直接接受。也可打印等。
2.2 物料周轉(zhuǎn)流程中盡可能AI人工智能高效的方式方法或多種方式并存,適合不同操作人的習(xí)慣偏好選擇。
2.3 對(duì)于物料周轉(zhuǎn)過程中的內(nèi)部責(zé)任應(yīng)采取AI等方式如人臉識(shí)別,語(yǔ)音交互 自動(dòng)生成短信碼 或二維碼掃描或攝像拍照等方式確認(rèn)。更加方便進(jìn)行記賬以及綜合管理等效率的提高。
2.4操作端 :安卓系統(tǒng)(送物機(jī)器人主控屏/專用平板)PC電腦端
2.5 一般流程:一旦有新的發(fā)料指令單,就會(huì)在發(fā)料責(zé)任人操作端跳出提示;發(fā)料人按要求裝好物料到送物機(jī)器人工作臺(tái)上的同時(shí)通過掃描或拍照等方式留存發(fā)料憑據(jù)到系統(tǒng)中;然后通過屏上點(diǎn)擊發(fā)出指令(此時(shí)收貨人也同時(shí)收到收貨碼)。送物機(jī)器人就會(huì)送達(dá)到指定點(diǎn);收貨人根據(jù)指令單通過人臉識(shí)別或權(quán)限碼或收貨碼則可就實(shí)際收貨狀況點(diǎn)擊確認(rèn)。則機(jī)器人也就會(huì)返回到指定的地點(diǎn)。此時(shí)系統(tǒng)中就自動(dòng)生成一條物料周轉(zhuǎn)數(shù)據(jù)。;具有權(quán)限的人可查看等。
附 送物機(jī)器人產(chǎn)品圖片






-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29664瀏覽量
212452 -
AGV
+關(guān)注
關(guān)注
27文章
1436瀏覽量
42244
發(fā)布評(píng)論請(qǐng)先 登錄
江智機(jī)器人產(chǎn)品評(píng)價(jià)體系

江智機(jī)器人公司成功構(gòu)建的康養(yǎng)港灣核心競(jìng)爭(zhēng)力以及技術(shù)璧壘
AGV搬運(yùn)機(jī)器人耗電量因素
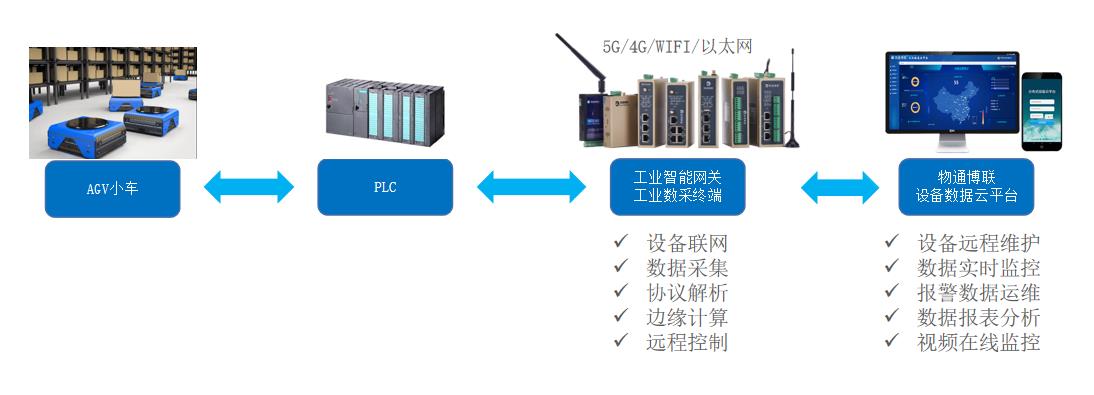
AGV機(jī)器人數(shù)據(jù)采集物聯(lián)網(wǎng)管理系統(tǒng)方案
完美CP來(lái)啦!當(dāng)AGV遇上機(jī)械臂!
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+兩本互為支持的書
agv搬運(yùn)機(jī)器人是怎么實(shí)現(xiàn)無(wú)人搬運(yùn)的?

智能呼叫、激光導(dǎo)航、自動(dòng)避障,為什么AGV機(jī)器人被需要?

AGV搬運(yùn)機(jī)器人的“雙腿”——AGV系統(tǒng)
機(jī)器人的三大矩陣是什么及關(guān)系式
智慧物流AGV機(jī)器人遠(yuǎn)程監(jiān)控系統(tǒng)解決方案

江智物料流轉(zhuǎn)機(jī)器人JZR200SW#機(jī)器人 #江智機(jī)器人
在用機(jī)器人與未來(lái)機(jī)器人并行推進(jìn)的權(quán)重關(guān)系





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論