") 第八章-PID 速度控制 PID控制 PID調(diào)參 PID溫度控制
第八章-PID 速度控制 PID控制 PID調(diào)參 PID溫度控制

功能介紹放開(kāi)頭, 使用便捷無(wú)需愁
這是全網(wǎng)最詳細(xì)、性價(jià)比最高的STM32實(shí)戰(zhàn)項(xiàng)目入門(mén)教程,通過(guò)合理的硬件設(shè)計(jì)和詳細(xì)的視頻筆記介紹,硬件使用STM32F103主控資料多方便學(xué)習(xí),通過(guò)3萬(wàn)字筆記、12多個(gè)小時(shí)視頻、20多章節(jié)代碼手把手教會(huì)你如何開(kāi)發(fā)和調(diào)試。讓你更快掌握嵌入式系統(tǒng)開(kāi)發(fā)。
**V3.3.0-STM32智能小車 **
**視頻: **[https://www.bilibili.com/video/BV16x4y1M7EN/?spm_id_from=333.337.search-card.all.click]
V3:HAL庫(kù)開(kāi)發(fā)、功能:PID速度控制、PID循跡、PID跟隨、遙控、避障、PID角度控制、視覺(jué)控制、電磁循跡、RTOS等功能。
第八章-PID-速度控制
8.1-速度控制探索
前面我們已經(jīng)能夠通過(guò)編碼器測(cè)量出速度值,下面我們來(lái)控制速度
我們先編寫(xiě)一個(gè)簡(jiǎn)單的控制方法
要求:講轉(zhuǎn)速控制再2.9-3.1轉(zhuǎn)每秒
可以把中斷里面不重要的輸出注釋掉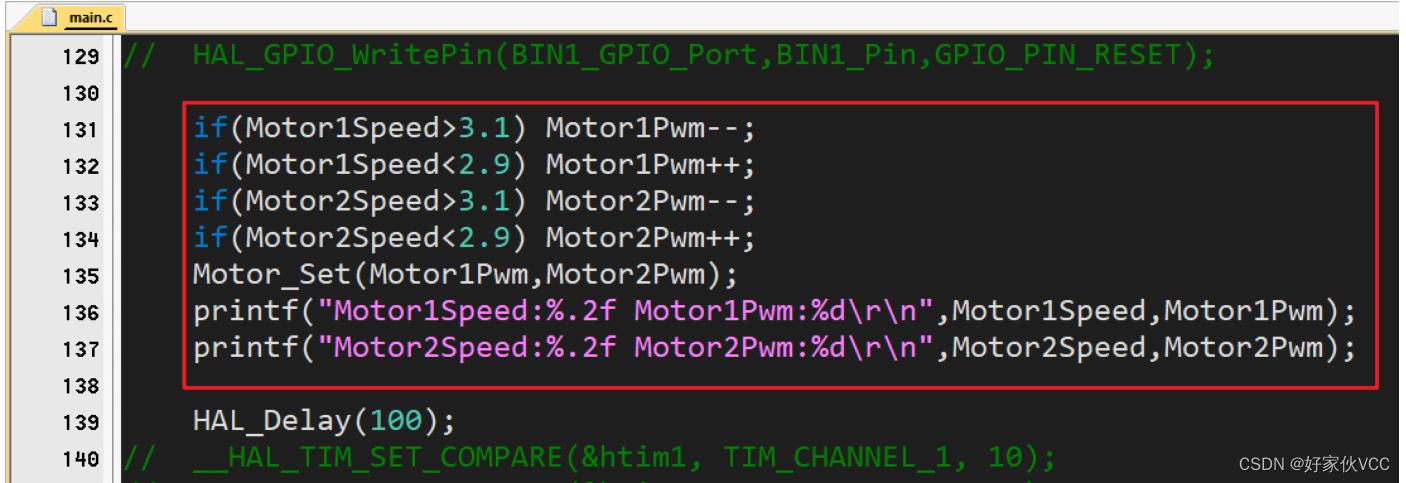
if(Motor1Speed >3.1) Motor1Pwm--;
if(Motor1Speed< 2.9) Motor1Pwm++;
if(Motor2Speed >3.1) Motor2Pwm--;
if(Motor2Speed< 2.9) Motor2Pwm++;
Motor_Set(Motor1Pwm,Motor2Pwm);
printf("Motor1Speed:%.2f Motor1Pwm:%drn",Motor1Speed,Motor1Pwm);
printf("Motor2Speed:%.2f Motor2Pwm:%drn",Motor2Speed,Motor2Pwm);
HAL_Delay(100);
開(kāi)始實(shí)驗(yàn)
現(xiàn)象就開(kāi)始電機(jī)沒(méi)有到達(dá)3轉(zhuǎn)每秒,PWM占空比逐漸增大,電機(jī)****逐漸達(dá)到要求轉(zhuǎn)速、到達(dá)要求轉(zhuǎn)速后我們?cè)黾幼枇Γ姍C(jī) 變慢 ,阻力大小不邊PWM占空比逐漸更大轉(zhuǎn)速 逐漸更大 。
這樣我們就把轉(zhuǎn)速控制到我們想要的范圍,但是我們并不滿意、能夠看出來(lái)控制的速度很慢,給電機(jī)一些阻力電機(jī)至少要2-3秒能夠調(diào)整過(guò)來(lái),這在一些場(chǎng)景是不允許的。
我們理想的控制效果是:在電機(jī)轉(zhuǎn)速很慢的是時(shí)候能快速調(diào)整,在電機(jī)一直轉(zhuǎn)的不能達(dá)到要求時(shí)候能夠更快速度調(diào)整
8.2-準(zhǔn)備工作-匿名上位機(jī)曲線顯示速度波形方便觀察數(shù)據(jù)
為了方便觀察電機(jī)速度數(shù)據(jù),我們通過(guò)上位機(jī)曲線顯示一下。
這里我們使用的上位機(jī)是匿名上位機(jī)-大佬寫(xiě)的非常穩(wěn)定功能也很多
我使用的版本是:****匿名上位機(jī)V7.2.2.8版本推薦大家和我使用一樣**
**匿名上位機(jī)官方下載鏈接:https://www.anotc.com/wiki/%E5%8C%BF%E5%90%8D%E4%BA%A7%E5%93%81%E8%B5%84%E6%96%99/%E8%B5%84%E6%96%99%E4%B8%8B%E8%BD%BD%E9%93%BE%E6%8E%A5%E6%B1%87%E6%80%BB
我們要把STM32數(shù)據(jù)發(fā)送到匿名上位機(jī),就要滿足匿名上位機(jī)的數(shù)據(jù)協(xié)議要求
在匿名上位機(jī)資料下載鏈接,可以下載到協(xié)議介紹
- 匿名上位機(jī)V7通信協(xié)議,20210528發(fā)布:https://pan.baidu.com/s/1nGrIGWj6qr9DWOcGpKR51g 提取碼:z8d1
- **CSDN **慕羽★大佬寫(xiě)的協(xié)議解析教程博客:https://blog.csdn.net/qq_44339029/article/details/106004997
1.先補(bǔ)充一下大小端模式
這是因?yàn)樵谟?jì)算機(jī)系統(tǒng)中,我們是以字節(jié)為單位的,每個(gè)地址單元都對(duì)應(yīng)著一個(gè)字節(jié),一個(gè)字節(jié)為 8bit。但是在C語(yǔ)言中除了8bit的char之外,還有16bit的short型,32bit的long型(要看具體的編譯器),另外,對(duì)于位數(shù)大于8位的處理器,例如16位或者32位的處理器,由于寄存器寬度大于一個(gè)字節(jié),那么****必然存在著一個(gè)如和將多個(gè)字節(jié)安排的問(wèn)題 。因此就導(dǎo)致了大端存儲(chǔ)模式和小端存儲(chǔ)模式。例如一個(gè)16bit的short型x,在內(nèi)存中的地址為0x0010,x的值為0x1122,那么0x11為高字節(jié),0x22為低字節(jié)。對(duì)于大端模式,就將0x11放在低地址中,即0x0010中,0x22放在高地址中,即0x0011中。 - 所謂的大端模式(BE big-endian),是指數(shù)據(jù)的低位保存在內(nèi)存的高地址中,而數(shù)據(jù)的高位,保存在內(nèi)存的低地址中(低對(duì)高,高對(duì)低);
- 所謂的小端模式(LE little-endian),是指數(shù)據(jù)的低位保存在內(nèi)存的低地址中,而數(shù)據(jù)的高位保存在內(nèi)存的高地址中(低對(duì)低,高對(duì)高)。
常見(jiàn)的單片機(jī)大小端模式:(1)KEIL C51中,變量都是大端模式的,而KEIL MDK中,變量是小端模式的。(2)SDCC-C51是小端尋址,AVRGCC 小端尋址.(3)PC小端,大部分ARM是小端 (4)總起來(lái)說(shuō)51單片機(jī)一般是大端模式,32單片機(jī)一般是小端模式.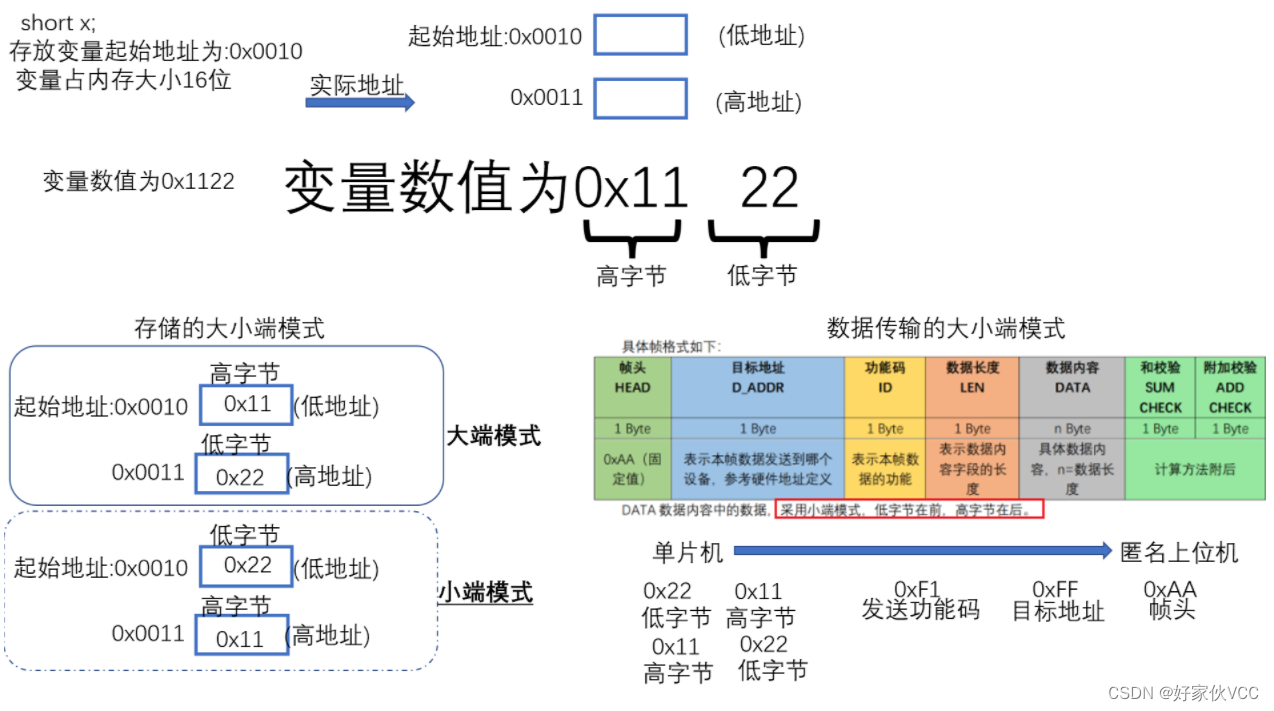
2.看一下上位機(jī)要求的協(xié)議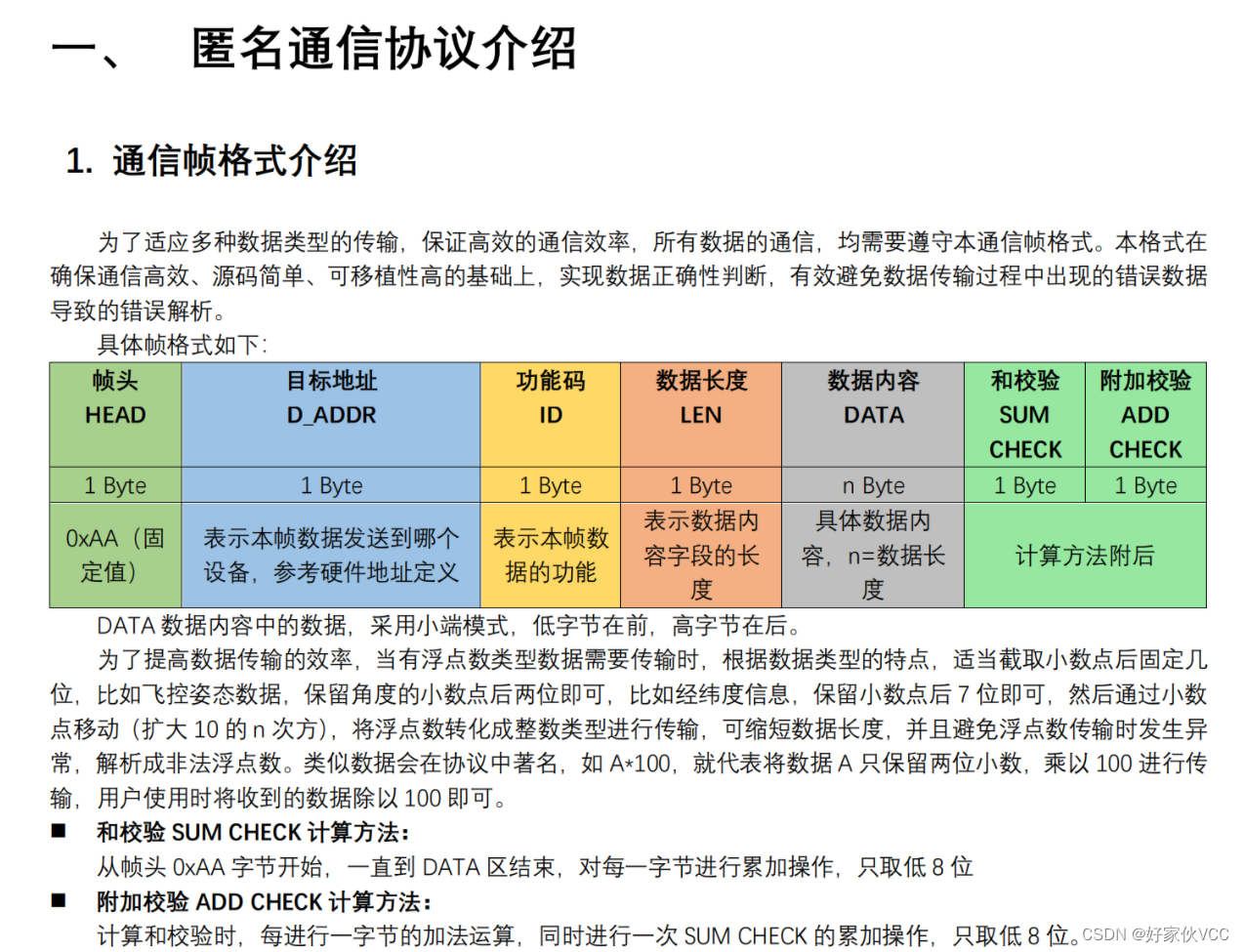
靈活格式幀(用戶自定義幀)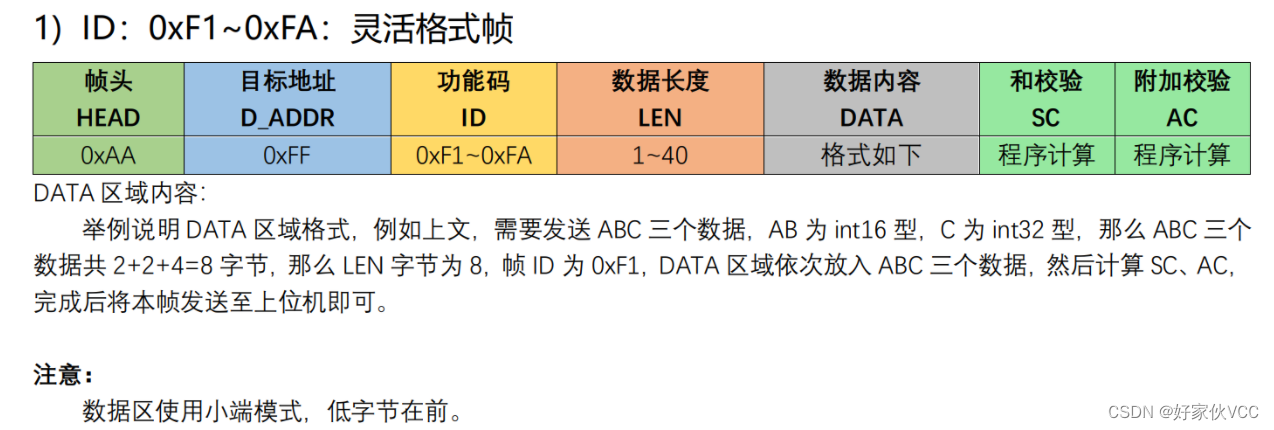
前面我們好理解
0xAA:一個(gè)字節(jié)表示開(kāi)始
0xFF:一個(gè)字節(jié)表示目標(biāo)地址
0xF1:一個(gè)字節(jié)表示發(fā)送功能碼
1-40:一個(gè)字節(jié)表示數(shù)據(jù)長(zhǎng)度
數(shù)據(jù)內(nèi)容有多個(gè)字節(jié)如何發(fā)送
因?yàn)榇诿看伟l(fā)送一個(gè)字節(jié),但是數(shù)據(jù)可能是int16_t 16位的數(shù)據(jù),或者int32_t 32位數(shù)據(jù),每次發(fā)送16位數(shù)據(jù),先發(fā)送數(shù)據(jù)低八位,還是先發(fā)送數(shù)據(jù)高八位那?
**匿名協(xié)議通信介紹給出:**DATA 數(shù)據(jù)內(nèi)容中的數(shù)據(jù),采用小端模式傳送,低字節(jié)在前,高字節(jié)在后。
那么就要求,比如我們?cè)诎l(fā)送16位數(shù)據(jù)0x2314我們要先發(fā)送低字節(jié)0x14,然后發(fā)送高字節(jié)0x23
那么如何解析出低字節(jié)或者高字節(jié),就需要知道多字節(jié)數(shù)據(jù)在單片機(jī)里面是怎么存的,因?yàn)镾TM32是小端存儲(chǔ),所以低字節(jié)就在低位地址中,高字節(jié)高位地址中。
如果使用32單片機(jī) 小端模式,0x23高地址,0x14在低地址,所以我們要先發(fā)低地址,再發(fā)高地址。
下面就是對(duì)16位數(shù)據(jù),或者32位數(shù)據(jù)的拆分
//需要發(fā)送16位,32位數(shù)據(jù),對(duì)數(shù)據(jù)拆分,之后每次發(fā)送單個(gè)字節(jié)
//拆分過(guò)程:對(duì)變量dwTemp 去地址然后將其轉(zhuǎn)化成char類型指針,最后再取出指針?biāo)赶虻膬?nèi)容
#define BYTE0(dwTemp) (*(char *)(&dwTemp))
#define BYTE1(dwTemp) (*((char *)(&dwTemp) + 1))
#define BYTE2(dwTemp) (*((char *)(&dwTemp) + 2))
#define BYTE3(dwTemp) (*((char *)(&dwTemp) + 3))
拆分后我們按照協(xié)議要求發(fā)送數(shù)據(jù)就可以了
niming.c
#include "niming.h"
#include "main.h"
#include "usart.h"
uint8_t data_to_send[100];
?
//通過(guò)F1幀發(fā)送4個(gè)uint16類型的數(shù)據(jù)
void ANO_DT_Send_F1(uint16_t _a, uint16_t _b, uint16_t _c, uint16_t _d)
{
uint8_t _cnt = 0;//計(jì)數(shù)值
uint8_t sumcheck = 0; //和校驗(yàn)
uint8_t addcheck = 0; //附加和校驗(yàn)
uint8_t i = 0;
data_to_send[_cnt++] = 0xAA;//幀頭
data_to_send[_cnt++] = 0xFF;//目標(biāo)地址
data_to_send[_cnt++] = 0xF1;//功能碼
data_to_send[_cnt++] = 8; //數(shù)據(jù)長(zhǎng)度
//單片機(jī)為小端模式-低地址存放低位數(shù)據(jù),匿名上位機(jī)要求先發(fā)低位數(shù)據(jù),所以先發(fā)低地址
data_to_send[_cnt++] = BYTE0(_a);
data_to_send[_cnt++] = BYTE1(_a);
data_to_send[_cnt++] = BYTE0(_b);
data_to_send[_cnt++] = BYTE1(_b);
data_to_send[_cnt++] = BYTE0(_c);
data_to_send[_cnt++] = BYTE1(_c);
data_to_send[_cnt++] = BYTE0(_d);
data_to_send[_cnt++] = BYTE1(_d);
for ( i = 0; i < data_to_send[3]+4; i++)
{
sumcheck += data_to_send[i];//和校驗(yàn)
addcheck += sumcheck;//附加校驗(yàn)
}
data_to_send[_cnt++] = sumcheck;
data_to_send[_cnt++] = addcheck;
HAL_UART_Transmit(&huart1,data_to_send,_cnt,0xFFFF);//這里是串口發(fā)送函數(shù)
}
//,通過(guò)F2幀發(fā)送4個(gè)int16類型的數(shù)據(jù)
void ANO_DT_Send_F2(int16_t _a, int16_t _b, int16_t _c, int16_t _d) //F2幀 4個(gè) int16 參數(shù)
{
uint8_t _cnt = 0;
uint8_t sumcheck = 0; //和校驗(yàn)
uint8_t addcheck = 0; //附加和校驗(yàn)
uint8_t i=0;
data_to_send[_cnt++] = 0xAA;
data_to_send[_cnt++] = 0xFF;
data_to_send[_cnt++] = 0xF2;
data_to_send[_cnt++] = 8; //數(shù)據(jù)長(zhǎng)度
//單片機(jī)為小端模式-低地址存放低位數(shù)據(jù),匿名上位機(jī)要求先發(fā)低位數(shù)據(jù),所以先發(fā)低地址
data_to_send[_cnt++] = BYTE0(_a);
data_to_send[_cnt++] = BYTE1(_a);
data_to_send[_cnt++] = BYTE0(_b);
data_to_send[_cnt++] = BYTE1(_b);
data_to_send[_cnt++] = BYTE0(_c);
data_to_send[_cnt++] = BYTE1(_c);
data_to_send[_cnt++] = BYTE0(_d);
data_to_send[_cnt++] = BYTE1(_d);
for ( i = 0; i < data_to_send[3]+4; i++)
{
sumcheck += data_to_send[i];
addcheck += sumcheck;
}
?
data_to_send[_cnt++] = sumcheck;
data_to_send[_cnt++] = addcheck;
HAL_UART_Transmit(&huart1,data_to_send,_cnt,0xFFFF);//這里是串口發(fā)送函數(shù)
}
//通過(guò)F3幀發(fā)送2個(gè)int16類型和1個(gè)int32類型的數(shù)據(jù)
void ANO_DT_Send_F3(int16_t _a, int16_t _b, int32_t _c ) //F3幀 2個(gè) int16 參數(shù) 1個(gè) int32 參數(shù)
{
uint8_t _cnt = 0;
uint8_t sumcheck = 0; //和校驗(yàn)
uint8_t addcheck = 0; //附加和校驗(yàn)
uint8_t i=0;
data_to_send[_cnt++] = 0xAA;
data_to_send[_cnt++] = 0xFF;
data_to_send[_cnt++] = 0xF3;
data_to_send[_cnt++] = 8; //數(shù)據(jù)長(zhǎng)度
//單片機(jī)為小端模式-低地址存放低位數(shù)據(jù),匿名上位機(jī)要求先發(fā)低位數(shù)據(jù),所以先發(fā)低地址
data_to_send[_cnt++] = BYTE0(_a);
data_to_send[_cnt++] = BYTE1(_a);
data_to_send[_cnt++] = BYTE0(_b);
data_to_send[_cnt++] = BYTE1(_b);
data_to_send[_cnt++] = BYTE0(_c);
data_to_send[_cnt++] = BYTE1(_c);
data_to_send[_cnt++] = BYTE2(_c);
data_to_send[_cnt++] = BYTE3(_c);
for ( i = 0; i < data_to_send[3]+4; i++)
{
sumcheck += data_to_send[i];
addcheck += sumcheck;
}
?
data_to_send[_cnt++] = sumcheck;
data_to_send[_cnt++] = addcheck;
?
HAL_UART_Transmit(&huart1,data_to_send,_cnt,0xFFFF);//這里是串口發(fā)送函數(shù)
}
?
niming.h
#ifndef NIMING_H
#define NIMING_H
#include "main.h"
//需要發(fā)送16位,32位數(shù)據(jù),對(duì)數(shù)據(jù)拆分,之后每次發(fā)送單個(gè)字節(jié)
//拆分過(guò)程:對(duì)變量dwTemp 去地址然后將其轉(zhuǎn)化成char類型指針,最后再取出指針?biāo)赶虻膬?nèi)容
#define BYTE0(dwTemp) (*(char *)(&dwTemp))
#define BYTE1(dwTemp) (*((char *)(&dwTemp) + 1))
#define BYTE2(dwTemp) (*((char *)(&dwTemp) + 2))
#define BYTE3(dwTemp) (*((char *)(&dwTemp) + 3))
?
?
void ANO_DT_Send_F1(uint16_t, uint16_t _b, uint16_t _c, uint16_t _d);
void ANO_DT_Send_F2(int16_t _a, int16_t _b, int16_t _c, int16_t _d);
void ANO_DT_Send_F3(int16_t _a, int16_t _b, int32_t _c );
?
#endif
?
添加測(cè)試代碼
//電機(jī)速度等信息發(fā)送到上位機(jī)
//注意上位機(jī)不支持浮點(diǎn)數(shù),所以要乘100
ANO_DT_Send_F2(Motor1Speed*100, 3.0*100,Motor2Speed*100,3.0*100);
下面設(shè)置上位機(jī)-數(shù)據(jù)解析


這個(gè)是控制效果,并不理想,后面我們介紹PID控制
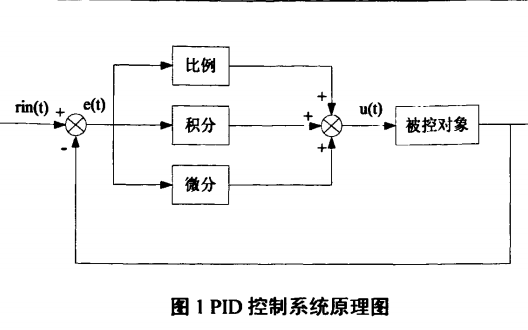
8.3-P I D 逐個(gè)參數(shù)理解

加入的現(xiàn)在 過(guò)去 未來(lái)概念
p:現(xiàn)在
i:過(guò)去
d:未來(lái)
那么我們就開(kāi)始寫(xiě)PID
PID的結(jié)構(gòu)體類型變量、里面成員都是浮點(diǎn)類型
先在pid.h聲明一個(gè)結(jié)構(gòu)體類型、聲明.c中的函數(shù)
#ifndef __PID_H
#define __PID_H
?
//聲明一個(gè)結(jié)構(gòu)體類型
typedef struct
{
float target_val;//目標(biāo)值
float actual_val;//實(shí)際值
float err;//當(dāng)前偏差
float err_last;//上次偏差
float err_sum;//誤差累計(jì)值
float Kp,Ki,Kd;//比例,積分,微分系數(shù)
} tPid;
?
//聲明函數(shù)
float P_realize(tPid * pid,float actual_val);
void PID_init(void);
float PI_realize(tPid * pid,float actual_val);
float PID_realize(tPid * pid,float actual_val);
#endif
?
然后在pid.c中定義結(jié)構(gòu)體類型變量
#include "pid.h"
?
//定義一個(gè)結(jié)構(gòu)體類型變量
tPid pidMotor1Speed;
//給結(jié)構(gòu)體類型變量賦初值
void PID_init()
{
pidMotor1Speed.actual_val=0.0;
pidMotor1Speed.target_val=0.00;
pidMotor1Speed.err=0.0;
pidMotor1Speed.err_last=0.0;
pidMotor1Speed.err_sum=0.0;
pidMotor1Speed.Kp=0;
pidMotor1Speed.Ki=0;
pidMotor1Speed.Kd=0;
}
//比例p調(diào)節(jié)控制函數(shù)
float P_realize(tPid * pid,float actual_val)
{
pid- >actual_val = actual_val;//傳遞真實(shí)值
pid- >err = pid- >target_val - pid- >actual_val;//當(dāng)前誤差=目標(biāo)值-真實(shí)值
//比例控制調(diào)節(jié) 輸出=Kp*當(dāng)前誤差
pid- >actual_val = pid- >Kp*pid- >err;
return pid- >actual_val;
}
//比例P 積分I 控制函數(shù)
float PI_realize(tPid * pid,float actual_val)
{
pid- >actual_val = actual_val;//傳遞真實(shí)值
pid- >err = pid- >target_val - pid- >actual_val;//當(dāng)前誤差=目標(biāo)值-真實(shí)值
pid- >err_sum += pid- >err;//誤差累計(jì)值 = 當(dāng)前誤差累計(jì)和
//使用PI控制 輸出=Kp*當(dāng)前誤差+Ki*誤差累計(jì)值
pid- >actual_val = pid- >Kp*pid- >err + pid- >Ki*pid- >err_sum;
return pid- >actual_val;
}
// PID控制函數(shù)
float PID_realize(tPid * pid,float actual_val)
{
pid- >actual_val = actual_val;//傳遞真實(shí)值
pid- >err = pid- >target_val - pid- >actual_val;////當(dāng)前誤差=目標(biāo)值-真實(shí)值
pid- >err_sum += pid- >err;//誤差累計(jì)值 = 當(dāng)前誤差累計(jì)和
//使用PID控制 輸出 = Kp*當(dāng)前誤差 + Ki*誤差累計(jì)值 + Kd*(當(dāng)前誤差-上次誤差)
pid- >actual_val = pid- >Kp*pid- >err + pid- >Ki*pid- >err_sum + pid- >Kd*(pid- >err - pid- >err_last);
//保存上次誤差: 這次誤差賦值給上次誤差
pid- >err_last = pid- >err;
return pid- >actual_val;
}
?
然后在main中要調(diào)用PID_init();函數(shù)
PID_init();
p調(diào)節(jié)函數(shù)函數(shù)只根據(jù)當(dāng)前誤差進(jìn)行控制
//比例p調(diào)節(jié)控制函數(shù)
float P_realize(tPid * pid,float actual_val)
{
pid- >actual_val = actual_val;//傳遞真實(shí)值
pid- >err = pid- >target_val - pid- >actual_val;//目標(biāo)值減去實(shí)際值等于誤差值
//比例控制調(diào)節(jié)
pid- >actual_val = pid- >Kp*pid- >err;
return pid- >actual_val;
}
主函數(shù)-可以估算當(dāng)p=10 就有較好的響應(yīng)速度
先看根據(jù)p比例控制的效果
p調(diào)節(jié) 電機(jī)穩(wěn)態(tài)后還是存在誤差。
下面加入i 調(diào)節(jié)也就是加入歷史誤差
pi的控制函數(shù)
//比例P 積分I 控制函數(shù)
float PI_realize(tPid * pid,float actual_val)
{
pid- >actual_val = actual_val;//傳遞真實(shí)值
pid- >err = pid- >target_val - pid- >actual_val;//目標(biāo)值減去實(shí)際值等于誤差值
pid- >err_sum += pid- >err;//誤差累計(jì)求和
//使用PI控制
pid- >actual_val = pid- >Kp*pid- >err + pid- >Ki*pid- >err_sum;
return pid- >actual_val;
}
因?yàn)閷?shí)際值1.6的時(shí)候誤差為1.4 上次偏差1.4和這次偏差1.4相加2.8 我們乘5 等于10點(diǎn)多就會(huì)有較好控制效果
這是pi 調(diào)節(jié)的控制效果
下面是PID調(diào)節(jié)的
// PID控制函數(shù)
float PID_realize(tPid * pid,float actual_val)
{
pid- >actual_val = actual_val;//傳遞真實(shí)值
pid- >err = pid- >target_val - pid- >actual_val;//目標(biāo)值減去實(shí)際值等于誤差值
pid- >err_sum += pid- >err;//誤差累計(jì)求和
//使用PID控制
pid- >actual_val = pid- >Kp*pid- >err + pid- >Ki*pid- >err_sum + pid- >Kd*(pid- >err - pid- >err_last);
//保存上次誤差:最近一次 賦值給上次
pid- >err_last = pid- >err;
return pid- >actual_val;
}
8.4-加入cJSON方便上位機(jī)調(diào)參

調(diào)大堆棧
軟件開(kāi)啟中斷
開(kāi)啟接收中斷
__HAL_UART_ENABLE_IT(&huart1,UART_IT_RXNE); //開(kāi)啟串口1接收中斷
中斷回調(diào)函數(shù)
uint8_t Usart1_ReadBuf[256]; //串口1 緩沖數(shù)組
uint8_t Usart1_ReadCount = 0; //串口1 接收字節(jié)計(jì)數(shù)
if(__HAL_UART_GET_FLAG(&huart1,UART_FLAG_RXNE))//判斷huart1 是否讀到字節(jié)
{
if(Usart1_ReadCount >= 255) Usart1_ReadCount = 0;
HAL_UART_Receive(&huart1,&Usart1_ReadBuf[Usart1_ReadCount++],1,1000);
}
編寫(xiě)函數(shù)用于判斷串口是否發(fā)送完一幀數(shù)據(jù)
extern uint8_t Usart1_ReadBuf[255]; //串口1 緩沖數(shù)組
extern uint8_t Usart1_ReadCount; //串口1 接收字節(jié)計(jì)數(shù)
//判斷否接收完一幀數(shù)據(jù)
uint8_t Usart_WaitReasFinish(void)
{
static uint16_t Usart_LastReadCount = 0;//記錄上次的計(jì)數(shù)值
if(Usart1_ReadCount == 0)
{
Usart_LastReadCount = 0;
return 1;//表示沒(méi)有在接收數(shù)據(jù)
}
if(Usart1_ReadCount == Usart_LastReadCount)//如果這次計(jì)數(shù)值等于上次計(jì)數(shù)值
{
Usart1_ReadCount = 0;
Usart_LastReadCount = 0;
return 0;//已經(jīng)接收完成了
}
Usart_LastReadCount = Usart1_ReadCount;
return 2;//表示正在接受中
}
然后我們把cJSON庫(kù)放入工程里面
下載cJSON新版
gtihub鏈接: [https://github.com/DaveGamble/cJSON]
百度網(wǎng)盤(pán)鏈接: [https://pan.baidu.com/s/1AcNHtZuv5bokMQ2f6QoG7Q]
提取碼:a422
和添加其他文件一樣,加入工程,然后指定路徑
編寫(xiě)解析指令的函數(shù)

#include "cJSON.h"
#include < string.h >
cJSON *cJsonData ,*cJsonVlaue;
if(Usart_WaitReasFinish() == 0)//是否接收完畢
{
cJsonData = cJSON_Parse((const char *)Usart1_ReadBuf);
if(cJSON_GetObjectItem(cJsonData,"p") !=NULL)
{
cJsonVlaue = cJSON_GetObjectItem(cJsonData,"p");
p = cJsonVlaue- >valuedouble;
pidMotor1Speed.Kp = p;
}
if(cJSON_GetObjectItem(cJsonData,"i") !=NULL)
{
cJsonVlaue = cJSON_GetObjectItem(cJsonData,"i");
i = cJsonVlaue- >valuedouble;
pidMotor1Speed.Ki = i;
}
if(cJSON_GetObjectItem(cJsonData,"d") !=NULL)
{
cJsonVlaue = cJSON_GetObjectItem(cJsonData,"d");
d = cJsonVlaue- >valuedouble;
pidMotor1Speed.Kd = d;
}
if(cJSON_GetObjectItem(cJsonData,"a") !=NULL)
{
cJsonVlaue = cJSON_GetObjectItem(cJsonData,"a");
a = cJsonVlaue- >valuedouble;
pidMotor1Speed.target_val =a;
}
if(cJsonData != NULL){
cJSON_Delete(cJsonData);//釋放空間、但是不能刪除cJsonVlaue不然會(huì) 出現(xiàn)異常錯(cuò)誤
}
memset(Usart1_ReadBuf,0,255);//清空接收buf,注意這里不能使用strlen
}
printf("P:%.3f I:%.3f D:%.3f A:%.3frn",p,i,d,a);
測(cè)試發(fā)送cJSON數(shù)據(jù)就會(huì)解析收到數(shù)據(jù)
然后我們賦值改變一個(gè)電機(jī)的PID參數(shù)和目標(biāo)轉(zhuǎn)速
然后我們通過(guò)串口發(fā)送命令,就會(huì)改變PID的參數(shù)了
這么我們的第八章就弄好了,下篇我們進(jìn)行第九章-PID整定
審核編輯 黃宇
-
電機(jī)
+關(guān)注
關(guān)注
143文章
9276瀏覽量
149009 -
PID
+關(guān)注
關(guān)注
37文章
1481瀏覽量
87773 -
PID控制
+關(guān)注
關(guān)注
10文章
461瀏覽量
41166 -
速度控制
+關(guān)注
關(guān)注
0文章
38瀏覽量
8113
發(fā)布評(píng)論請(qǐng)先 登錄
教你怎樣學(xué)會(huì)PID調(diào)參
PID調(diào)參的相關(guān)資料分享
專家PID控制和模糊PID控制
什么是pid控制,什么是pid控制器
pid算法_pid控制原理

先進(jìn)PID控制MATLAB仿真源程序
PID調(diào)節(jié)控制做電機(jī)速度控制資料
什么是PID?PID控制的各環(huán)節(jié)是什么?
什么是PID控制?
PID控制的理論和PID控制器設(shè)計(jì)的及PID控制器參數(shù)整定的以及分析
溫度控制的PID算法及C程序?qū)崿F(xiàn)
PID控制中如何整定PID參數(shù)

基于CW32的PID溫度控制案例分享





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論