") TDC-GP22在磁致伸縮位移傳感器中的應(yīng)用
TDC-GP22在磁致伸縮位移傳感器中的應(yīng)用

0、引言
磁致伸縮傳感器經(jīng)常應(yīng)用于惡劣工業(yè)環(huán)境,能夠?qū)κ偷纫何贿M(jìn)行精確測(cè)量。由于其不受油漬和塵埃等環(huán)境的影響,浮子與敏感材料非接觸,從而大大延長(zhǎng)了工作壽命;傳感器輸出絕對(duì)位置,斷電后無(wú)需重新標(biāo)定。磁致伸縮傳感器的測(cè)量精度主要由前端信號(hào)處理和時(shí)間測(cè)量這兩個(gè)電路決定。傳統(tǒng)的時(shí)間測(cè)量方式難以達(dá)到納秒級(jí)的精度,因而無(wú)法保證測(cè)量結(jié)果的精度。本文著重介紹了新型芯片TDC-GP2在磁致伸縮傳感器中的應(yīng)用,有效解決了脈沖時(shí)差測(cè)量精度不高的問(wèn)題。
1、傳感器原理
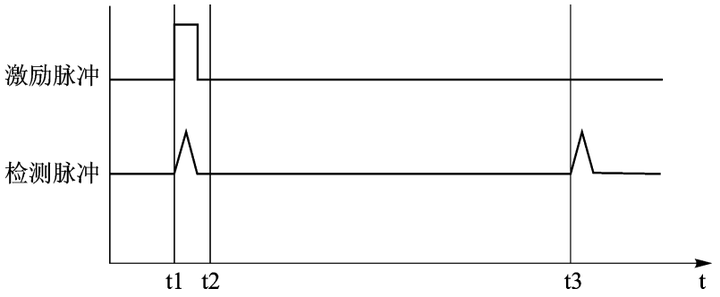
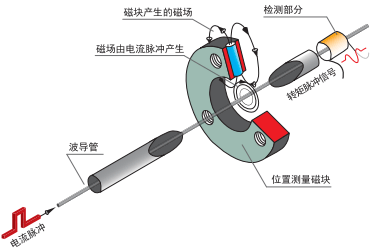
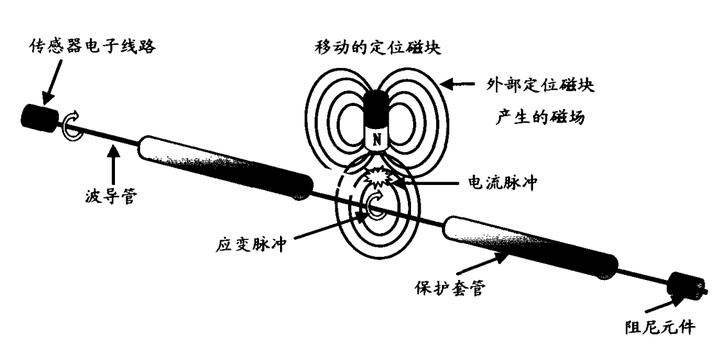
稀土合金材料在外力磁場(chǎng)交互作用下會(huì)發(fā)生“磁致伸縮”現(xiàn)象。當(dāng)浮子的磁場(chǎng)與激勵(lì)脈沖的磁場(chǎng)交疊時(shí)會(huì)產(chǎn)生應(yīng)變脈沖,脈沖以一定的速度在波導(dǎo)絲上傳播,經(jīng)信號(hào)處理電路后可得到起始脈沖和停止脈沖,兩者之間的時(shí)間差即為激勵(lì)脈沖在波導(dǎo)絲上的傳播時(shí)間。
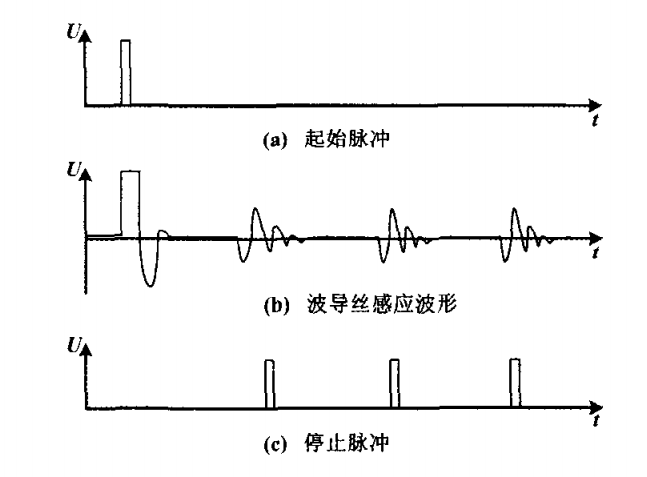 磁致伸縮位移傳感器前端波形
磁致伸縮位移傳感器前端波形
傳感器位移計(jì)算公式為:
S=v×tn(1)
式中:S為浮子相對(duì)位移;v為感應(yīng)脈沖在波導(dǎo)絲上的傳播速度;tn為激勵(lì)脈沖和第n個(gè)浮子產(chǎn)生的激勵(lì)脈沖時(shí)間差。而對(duì)于特定環(huán)境下的測(cè)量,感應(yīng)脈沖傳播速度恒定,此時(shí)只要能精確測(cè)出兩脈沖之間的時(shí)間差,就可以精確地計(jì)算出浮子的位置。
目前,國(guó)外磁致伸縮傳感器的分辨率已經(jīng)達(dá)到小于1μm的水平,因而可以推算出其時(shí)間間隔測(cè)量必須精確到納秒級(jí)。若采用傳統(tǒng)的計(jì)時(shí)方式,測(cè)量晶振頻率就要達(dá)到GHz的范圍。目前,市場(chǎng)上的振蕩器很少能達(dá)到如此高的頻率,且穩(wěn)定性也不理想。對(duì)此,本文利用高精度測(cè)時(shí)芯片TDC-GP2有效解決了這一難題。
2TDC-GP2時(shí)間測(cè)量
2.1TDC-GP2時(shí)間測(cè)量原理
TDC-GP2是ACAM公司通用TDC系列的新一代產(chǎn)品,其時(shí)間分辨率可達(dá)50ps,遠(yuǎn)遠(yuǎn)超過(guò)了目前磁致伸縮傳感器對(duì)時(shí)間測(cè)量精度的要求。TDC-GP2可進(jìn)行三次采樣,平均電流消耗為15μA,測(cè)量范圍為500ns~4ms,滿(mǎn)足一般場(chǎng)合下傳感器測(cè)量范圍的要求。芯片內(nèi)部提供了精確的停止脈沖使能窗口,并具有高速脈沖發(fā)生器、溫度測(cè)量和時(shí)鐘控制等功能,這使得它在低成本、低功耗的精確時(shí)間測(cè)量方面有著廣闊的應(yīng)用前景。
TDC-GP2是以信號(hào)通過(guò)內(nèi)部門(mén)電路的傳播延遲來(lái)進(jìn)行高精度時(shí)間間隔測(cè)量的。芯片上的智能電路結(jié)構(gòu)、擔(dān)保電路和特殊的布線(xiàn)方法使芯片能夠精確地記錄信號(hào)通過(guò)門(mén)電路的個(gè)數(shù)。芯片測(cè)量時(shí)間的精度由內(nèi)部門(mén)電路的傳播延遲時(shí)間決定。
TDC-GP2芯片采用前置適配器來(lái)擴(kuò)展時(shí)間測(cè)量范圍,并且能夠保持分辨率不變。TDC-GP2的高速單元并不測(cè)量整個(gè)時(shí)間間隔,而是僅僅測(cè)量起始脈沖和停止脈沖到相鄰的基準(zhǔn)時(shí)鐘上升沿的時(shí)間間隔。TDC-GP2時(shí)間間隔測(cè)量原理如圖2所示。
 磁致伸縮傳感器時(shí)間間隔測(cè)量原理
磁致伸縮傳感器時(shí)間間隔測(cè)量原理
圖2中:HIT和HIT?為T(mén)DC-GP2在相應(yīng)區(qū)域間內(nèi)測(cè)得的通過(guò)的門(mén)電路個(gè)數(shù),并記錄在內(nèi)部寄存器中;CC為基準(zhǔn)時(shí)鐘在相應(yīng)區(qū)間內(nèi)測(cè)量而得到的時(shí)間。在測(cè)量過(guò)程中,必須對(duì)TDC-GP2進(jìn)行內(nèi)部校準(zhǔn),即記錄在一個(gè)和兩個(gè)基準(zhǔn)時(shí)鐘周期內(nèi)通過(guò)的門(mén)電路個(gè)數(shù),用Cal?和Cal?來(lái)表示。
TDC-GP2內(nèi)部ALU時(shí)間間隔計(jì)算公式如式(2)和式(3)所示。
Time=RES_X×T×2s(3)式中:T為基準(zhǔn)時(shí)鐘周期;ClKHSDiv為內(nèi)部時(shí)鐘預(yù)劃分?jǐn)?shù)。測(cè)量結(jié)果存儲(chǔ)在內(nèi)部32位寄存器中。
2.2、TDC-GP2的硬件設(shè)計(jì)
系統(tǒng)采用ATmega128作為磁致伸縮傳感器的MCU,其價(jià)格低廉,具有豐富的內(nèi)部資源,使用方便。單片機(jī)通過(guò)SPI接口與TDC-GP2通信。TDC-GP2核心電壓為1.8~3.6V,必須由電池或固定的線(xiàn)性電壓調(diào)節(jié)器供電。穩(wěn)定的供電電源是獲得良好測(cè)量結(jié)果的基本保證,并且要求電源具有高電容性和低電感性,從而保證測(cè)量結(jié)果的可靠性。本設(shè)計(jì)采用3.3V的線(xiàn)性電源供電。在硬件設(shè)計(jì)中,印刷電路板(PCB)布線(xiàn)要注意對(duì)電源進(jìn)行濾波和去耦。本文使用10μF和0.1μF的電容對(duì)進(jìn)入數(shù)字部分的電源進(jìn)行濾波,并使用0.1μF的電容對(duì)芯片和電源進(jìn)行去耦,去耦電容要盡可能放在靠近TDC-GP2的地方3]。TDC-GP2硬件連接電路如圖3所示。
磁致伸縮傳感器TDC-GP22硬件連接電路
圖3中,4MHz晶振作為T(mén)DC-GP2的基準(zhǔn)時(shí)鐘和芯片的粗計(jì)數(shù)器;32.768kHz晶振作為T(mén)DC-GP2的校準(zhǔn)時(shí)鐘。測(cè)量前必須對(duì)基準(zhǔn)時(shí)鐘進(jìn)行校準(zhǔn)。TDC-GP2從校準(zhǔn)時(shí)鐘引出Start和Stop脈沖,啟動(dòng)TDC-GP2單元測(cè)量時(shí)差,結(jié)果存儲(chǔ)在結(jié)果寄存器中,并對(duì)中斷標(biāo)志位置位。微處理器可以計(jì)算出基準(zhǔn)時(shí)鐘的頻率誤差。
測(cè)量過(guò)程中,RSTN為T(mén)DC-GP2復(fù)位引腳,測(cè)量前要確保其有一個(gè)不小于50ns的低電平,否則會(huì)導(dǎo)致測(cè)量不正常。Start端接收到脈沖之后開(kāi)始計(jì)時(shí),Stop,端接收到指定脈沖次數(shù)后停止計(jì)時(shí),并使能中斷,通知MCU讀取數(shù)據(jù)。
2.3、TDC-GP2時(shí)間測(cè)量軟件設(shè)計(jì)
系統(tǒng)采用ATmegal28對(duì)磁致伸縮傳感器進(jìn)行控制和數(shù)據(jù)處理,其中對(duì)TDC-CP2芯片的設(shè)置和結(jié)果的讀取為整個(gè)軟件的關(guān)鍵部分。TDC-GP2測(cè)量結(jié)果有八位有效數(shù)字,為保證測(cè)量結(jié)果精度,需使用雙浮點(diǎn)型來(lái)表示。本設(shè)計(jì)中采用支持雙浮點(diǎn)運(yùn)算的編譯器IAR-AVR來(lái)編寫(xiě)程序。TDC-GP2時(shí)間測(cè)量流程如圖4所示。
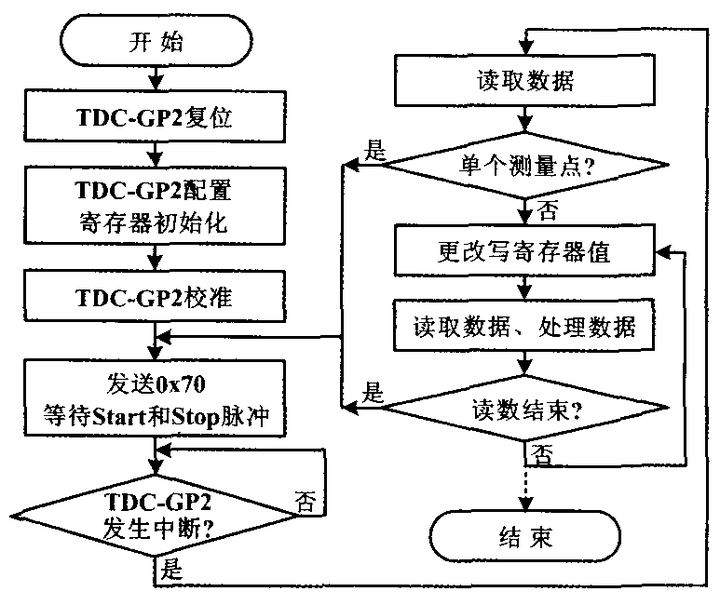 TDC—GP2 時(shí)間測(cè)量流程圖
TDC—GP2 時(shí)間測(cè)量流程圖
軟件設(shè)計(jì)首先要對(duì)單片機(jī)端口和SPI工作方式初始化,主要包括初始化PD?、PD。端口作為輸出和中斷輸入,SPI為Model1工作方式,在每次讀寫(xiě)序列之間SSN至少保持50ns高電平。每次對(duì)TDC-GP2初始化之前要對(duì)TDC-GP2進(jìn)行復(fù)位,且先進(jìn)行硬件復(fù)位,再進(jìn)行軟件復(fù)位,硬件復(fù)位持續(xù)時(shí)間必須大于50ns。然后根據(jù)測(cè)量模式對(duì)TDC-GP2內(nèi)部寫(xiě)寄存器Reg0~Reg5進(jìn)行初始化,此時(shí),要注意關(guān)閉移向單元和噪聲單元,否則會(huì)導(dǎo)致測(cè)量失敗;同時(shí)也不能對(duì)芯片進(jìn)行連續(xù)讀寫(xiě)操作,每個(gè)寄存器必須進(jìn)行單獨(dú)尋址。讀操作前要先發(fā)送操作碼,在發(fā)送操作碼之后的第一個(gè)時(shí)鐘上升沿,TDC-CP2發(fā)送指定地址的最高位到SO輸出。本文采用高精度和高穩(wěn)定性的32.768kHz時(shí)鐘對(duì)基準(zhǔn)時(shí)鐘和內(nèi)部TDC進(jìn)行校準(zhǔn)。在寫(xiě)寄存器中設(shè)置TDC內(nèi)部自動(dòng)校準(zhǔn),并設(shè)定標(biāo)定基準(zhǔn)時(shí)鐘的周期數(shù)n。啟動(dòng)校準(zhǔn)后,TDC內(nèi)部ALU自動(dòng)計(jì)算32.768kHz時(shí)鐘的n個(gè)周期與實(shí)際基準(zhǔn)時(shí)鐘單個(gè)周期的比值,結(jié)果存儲(chǔ)在結(jié)果寄存器中。計(jì)算公式如式(4)所示:
RES_x=(n×T?2768k)/T(4)
單片機(jī)通過(guò)SPT總線(xiàn)讀取TDC校準(zhǔn)值后,通過(guò)式(5)計(jì)算修正因子CAL。
式中:Tz?為校準(zhǔn)時(shí)鐘的周期值;Tne為基準(zhǔn)時(shí)鐘的理論周期值。TDC-GP2測(cè)量的時(shí)間要乘以校準(zhǔn)因子CAL來(lái)修正。部分關(guān)鍵程序代碼如下。
//TDC-CP2復(fù)位
SET_RSTN_H;
CLR_RSTN_L;
asm("nop");
SET_RSTN_H;
Write_SPI_8byte(0x50);
//TDC-CP2寄存器初始化
voidTDC_Config(void)
Write4ByteToTDC(Reg0.0x008668);//自動(dòng)校準(zhǔn)Write4ByteToTDC(Reg?,0x314300);//采樣點(diǎn)數(shù)Write4ByteToTDC(Reg2.OxE00000);//開(kāi)中斷Write4ByteToTDC(Reg3.0x180000);//4ms溢出Write4ByteToTDC(Reg4.0x200000)
Write4ByteToTDC(Reg5.0x080000)
//關(guān)閉噪聲單元和移相單元
WritelByteToTDC(0x03);//手動(dòng)校準(zhǔn)
WritelByteToTDC(0x70);//準(zhǔn)備測(cè)量
3、濾波算法與調(diào)試結(jié)果
3.1、數(shù)字濾波算法
為了防止環(huán)境干擾對(duì)TDC-GP2測(cè)量結(jié)果精度的影響,采用數(shù)字濾波來(lái)提高傳感器的穩(wěn)定性。經(jīng)仿真比較6],本設(shè)計(jì)選用了防脈沖干擾平均濾波法,其穩(wěn)定性更高。
3.2、調(diào)試結(jié)果
大量測(cè)試結(jié)果表明,TDC-GP2在磁致伸縮傳感器中測(cè)量所得到的數(shù)據(jù)能夠滿(mǎn)足要求。在量程為1m的傳感器中,在量程范圍內(nèi)的兩端點(diǎn)位置及中間點(diǎn)位置作定點(diǎn)測(cè)量,實(shí)測(cè)時(shí)間數(shù)據(jù)如表1所示。

由表1可知,磁致伸縮傳感器在定點(diǎn)測(cè)量的時(shí)間值的最大偏差不超過(guò)10ns,標(biāo)準(zhǔn)偏差不超過(guò)3ns。
4結(jié)束語(yǔ)
TDC-GP2具有高精度、低功耗和封裝小等特點(diǎn),適合于低成本的磁致伸縮傳感器領(lǐng)域;具有三次采樣能力,可同時(shí)測(cè)量三層液位,極大地方便了工業(yè)領(lǐng)域的應(yīng)用。本設(shè)計(jì)解決了磁致伸縮傳感器中時(shí)間測(cè)量模塊精度不高的問(wèn)題,遠(yuǎn)遠(yuǎn)超過(guò)了國(guó)外磁致伸縮傳感器最高分辨率對(duì)時(shí)間測(cè)量模塊的要求,做到了精度無(wú)損測(cè)量,為傳感器位移精度的提高打下了良好的基礎(chǔ),具有廣闊的發(fā)展前景。
審核編輯 黃宇
-
位移傳感器
+關(guān)注
關(guān)注
5文章
1170瀏覽量
35165 -
磁致伸縮
+關(guān)注
關(guān)注
2文章
26瀏覽量
9350
發(fā)布評(píng)論請(qǐng)先 登錄
磁致伸縮傳感器利用TDC時(shí)間測(cè)算

STM32的磁致伸縮智能位移傳感器研究
FPGA在磁致伸縮位移傳感器中的應(yīng)用
磁致伸縮位移傳感器在大壩監(jiān)測(cè)中的應(yīng)用
EtherCAT在磁致伸縮位移傳感器中的應(yīng)用
PROFIBUS在磁致伸縮位移傳感器中的使用
磁致伸縮位移傳感器在閥門(mén)中的應(yīng)用







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論