 巡邊機器人詳細制作教程
巡邊機器人詳細制作教程

本項目介紹的是一個既簡單又有趣的巡邊機器人,即可以自主的沿著墻壁的邊緣行走,這和老鼠的行為很像,為此再加上專門的造型設計,儼然一只在黑暗中偷偷摸摸的狡猾老鼠。通常要實現類似沿墻走的功能,往往需要紅外線或者超聲波等之類較為高級的傳感器,且還要加上復雜的控制電路,而本項目卻是用簡單到僅有幾個開關就能實現同樣的效果,可以說是非常值得推薦的一個項目。
本項目機器人有兩個版本,A版的體型比較苗條,外形更像老鼠,不過由于受到結構的限制,其只能過外側的拐角而不能過內側的拐角(即可以圍繞方形盒子外側跑而不能在內部轉),且過外側拐角還會有點遲鈍,視頻中可以看到其轉到四個角的時候會有一個緩慢的轉彎過程,不過倒是很像老鼠在轉過角落時探出頭先觀察一下情況再繼續跑一樣,名副其實一只狡猾的老鼠;B版的體型比較圓潤,雖然看起來肥肥胖胖的,但它卻是非常的靈活,不但可以快速過外側的拐角,而且還能順暢過內側的拐角,跑起來非常迅速。
基本原理:
本項目采用的是與 PVCBOT-7號 類似的三輪傳動結構,不過是其的反向應用,即兩個主動輪作為后輪,一個傳動輪作為前輪,就相當于倒著開的三輪小車。
運動方式:
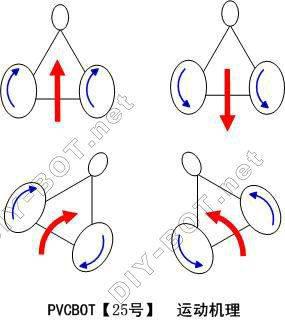
本項目機器人的運動機理與 PVCBOT-1號——運動機理 類似,不同是原來的前進變為后退,原來的后退變為前進,而左右拐彎的原理則基本不變。
控制前面兩個輪子的轉動方向就可以控制整個機器人行進的方向:
1、左右兩個后輪都向前轉,則機器人向“正前方”直線前進;
2、左右兩個后輪都向后轉,則機器人向“正后方”直線倒退;
3、左后輪向前轉,右后輪向后轉(或不轉),則機器人將以前輪為軸心順時針轉動,即實現向“右前方”轉彎前進;
4、右后輪向前轉,左后輪向后轉(或不轉),則機器人將以前輪為軸心逆時針轉動,即實現向“左前方”轉彎倒退。
驅動機理:
在機器人的一側前端用鋼絲做了一根觸須,通過觸須感應是否挨著墻壁,假如遠離墻壁則控制整體往墻壁靠,假如過于靠近墻壁則控制整體離開墻壁,讓整體出于“遠離-靠近—再遠離—再靠近。。。”的動態平衡中,就可以沿著墻壁的走向一直前進。
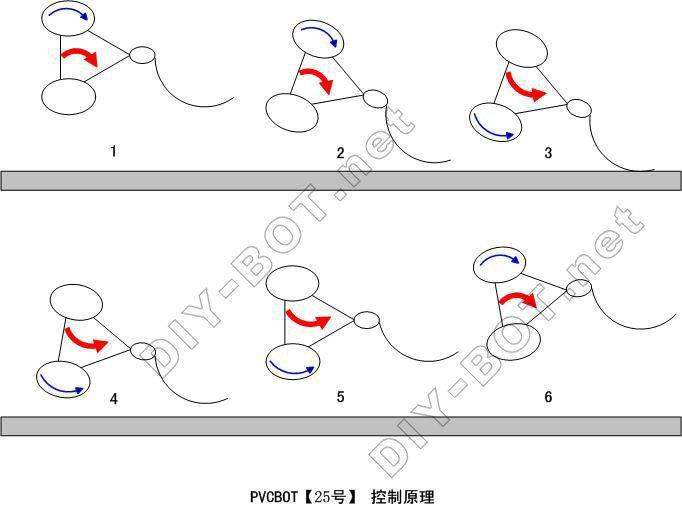
按照上圖前進的方向,我們把墻外側的后輪稱為左后輪,把靠近墻內側的后輪稱為右后輪,則:
1)默認狀態下,遠離墻壁,觸須不觸發,左后輪轉動,右后輪不轉動,則整體往墻內側轉向前進;
2)整體繼續往墻內側轉向前進;
3)當足夠靠近墻壁時,觸須碰到墻壁觸發,左后輪不轉動,右后輪轉動,則整體往墻外側轉向前進,即讓整體不至于過于靠近墻壁,而是向墻外側轉出;
4)由于觸須是機械式的觸發,有一定的慣性,即在整體已經轉向墻外側的時候,觸須的觸發不會馬上釋放,而是會有一定的延時,也就是讓整體向墻外側轉出的過程會持續一定的時間;
5)整體繼續向墻外側轉出;
6)當遠離墻到一定程度時,觸須的觸發釋放,左后輪重新轉動,右后路停止轉動,則整體開始往墻內側再轉向前進,即重新回到以上第1步,由此循環往復。。。
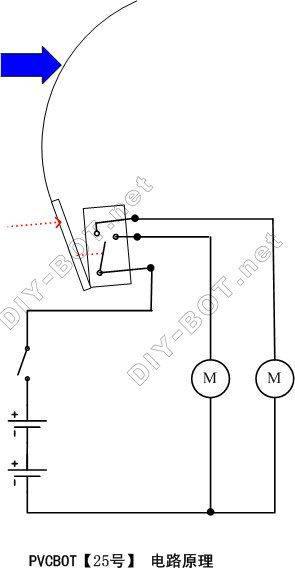
電路原理:
本項目的電路非常簡單,由一個最基本的電學電路組成。
1、機器人的動力是由兩個直流電機提供的,眾所周知,直流電機的兩個電極連接直流電源,接通電源則電機轉動前進;
2、電源為兩節7號電池組成的電池組,電池組同一時間只為其中一個電機供電。如果身體往墻內側轉則是驅動外側的輪子轉動,而身體往墻外側轉則是驅動內側輪子轉動。
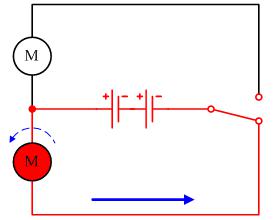
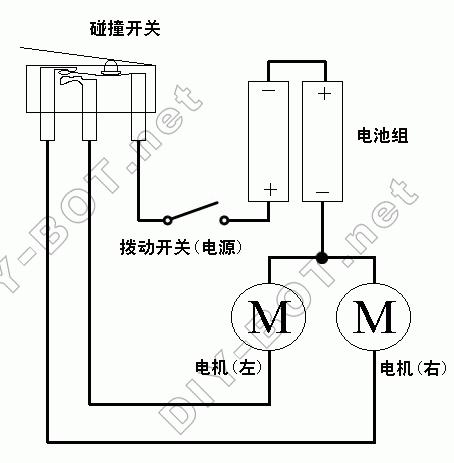
3、通過三引腳的碰撞開關,可以控制電池組為哪一個電機進行供電,而碰撞開關則連接觸須,觸須被擠壓則碰撞開關被觸發。 下圖為控制原理。
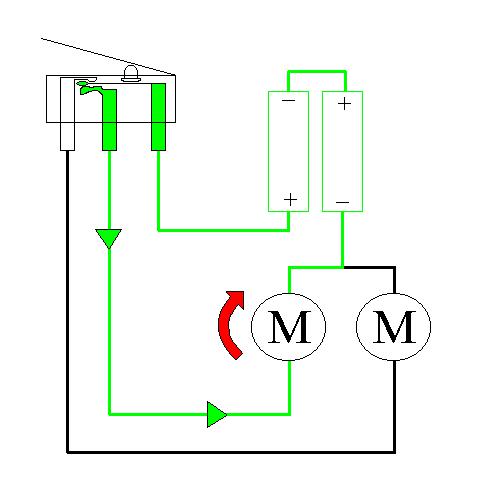
4、機器人頭部有一根鋼絲作的觸須,觸須分別連接在碰撞開關上。
(1)沒有靠著墻壁時,觸須沒有被擠壓,不觸發碰撞開關,碰撞開關默認的通路,給外側的電機供電,外側電機轉動而內側電機不轉動,則身體轉向往內側墻上靠并前進;
(2)碰到墻壁時,觸須被擠壓,觸發碰撞開關,碰撞開關斷開默認通路,連接另外的一組通路,給內側電機供電,內側電機轉動而外側電機不轉,則身體轉向墻外側并前進;
(3)身體轉向墻外側前進一定距離,觸須離開墻壁,轉回以上第一步循環往復……
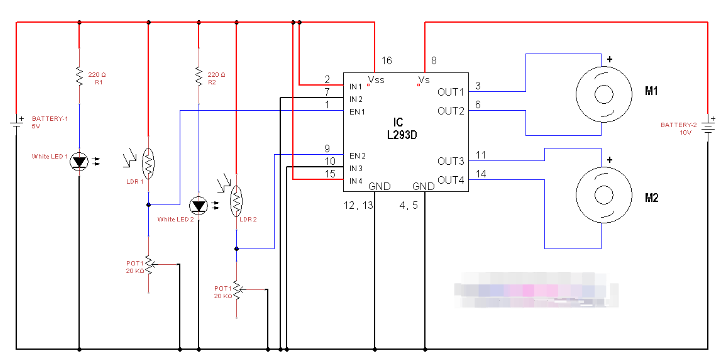
完整的電路原理圖:
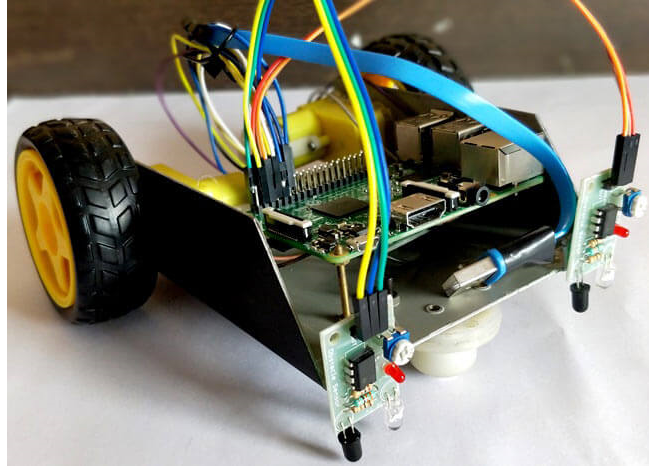
實物電路接線圖供參考。
本項目以 PVCBOT-A型 平臺車為基礎,以杜邦線和排針為主要連接方式, 以下為電路焊接示意圖。

準備工作:
本項目需要的器材主要包括:PVC線槽、PVCBOT-A型基礎平臺小車、碰撞開關、撥動開關、螺絲、排針等。
制作過程:
1.傳感器
2.開關
3.電源
本項目機器人用兩節7號電池供電,可以是普通的7號干電池(1.5V/節)或鎳氫/鎳鎘充電電池(1.2V/節),也可以是7號鋰電池(3.5V/節)。
4.裝飾:
電路:
按照電路原理圖和焊接示意圖,把電路的各部分焊接起來。
其中,電機是通過杜邦線插接到電路板的排針上與整個電路相連的,要注意核對電路圖不要弄錯了。
把電機的杜邦線也插接到電路板上的排針上,并打開撥動開關進行測試。
正常情況下:
1)觸須不觸發時,靠著觸須一側的電機是不轉動的,而另一側的電機是轉動的,且轉動的方向是向前的;
2)觸須觸發時,靠著觸須一側的電機轉動,且轉動的方向也是向前的,而另一側的電機停止。
假如出現異常情況:
1)兩側的電機轉停的狀態相反了(如:該它轉的它停了),則調換兩個電機所插接的排針;
2)某一電機轉的方向反了(如:該往前轉的它往后轉了),則只要把該電機的兩根杜邦線調換過來插到排針上。
調試:
把機器人放到墻壁旁,讓觸須的一側靠近墻壁,打開撥動開關。
正常情況下:
1)默認的時候,遠離墻壁的一側輪子會向前轉動(另一側輪子不轉),頭部會轉向墻壁內側,整體會靠向墻壁前進;
2)當靠向墻壁足夠近時,觸須會碰到墻壁觸發,然后靠近墻壁的一側的輪子會向前轉動(另一側輪子停止),頭部會反過來轉向墻壁外側,整體會遠離墻壁前進;
3)當遠離墻壁一定距離時,觸須釋放,遠離墻壁的一側輪子會重新轉動,再次回到前面第一步的情況,如此循環往復,讓機器人在“靠近——遠離——再靠近——再遠離”的狀態間切換實現動態平衡,也就是實現了沿著墻壁邊緣走的效果。
注意檢查:
默認觸須沒有觸發時,沒有觸須的一側后輪是轉動的,且是向前轉動的(讓小車向前往另一側轉向并前進);觸發觸須后,有觸須的一側后輪是轉動的,且是向前轉動的(讓小車向前往另一側轉向并前進);
(1)假如默認是有觸須的一側輪子是轉動的,則要把兩個電機的杜邦線對應插的排針調換過來重插,即讓兩個后輪電機的控制順序調換過來;
(2)假如輪子沒有向前轉動,則把該輪子對應電機的兩根杜邦線調換過來插到排針上,即讓電機的電極電流方向調換過來。
常見的問題:
1)原地打轉,并且轉向有觸須的一側(視頻中有該情形),則是正常的,只要讓機器人有觸須的一側靠近墻壁,讓觸須能夠轉到碰到墻壁即可;
2)觸須碰到墻壁但是無法觸發,則用尖嘴鉗把觸須再向外側彎折調整一下,或者重新按照前面關于傳感器部分的制作過程進行檢查;假如是頭部卡住觸須導致無法觸發的,可以把頭部向下彎折的幅度調小一些。
3)靠近墻壁一側的后輪擦到墻壁,導致卡住動不了,則用尖嘴鉗把觸須向外彎折,讓觸須可以在靠向墻壁時早一點觸發。
關于內側拐角的巡邊:
前面我們提過,本項目的B版機器人由于比A版在體型結構上的更完善,所以B版可以走A版無法走得過的內側拐角。之所以如此,主要是:
1)B版體型比較圓潤,沒有那么多的菱角,不容易被周邊墻壁或者障礙物卡住;
2)A版的觸須有點短,且從頭部前端引出,觸發相對遲鈍一些;而B版的觸須是從身側引出,并且比較長,觸發的靈敏度更高一些。
注意:要想讓B版要真正能過內側拐角,需要在角落上放置一個小圓柱(下圖藍色),我們這里是直接放上圓柱形的1號干電池(見視頻),也就是讓角落更圓滑一點,這樣B版在拐彎時不至于卡在里面。
假如過彎道不是很順暢,可以適當調整觸須的彎曲程度。
-
機器人
+關注
關注
213文章
29650瀏覽量
212323
發布評論請先 登錄
分享 《機器人制作天空寶典》,OHM 自律型機器人制作
循線音樂百靈鳥機器人--鷗鵬機器人制作
高速巡線機器人 精選資料分享

如何使用樹莓派制作一個巡線機器人

巡線機器人電路圖 巡線機器人的工作原理和應用領域





 工商網監
工商網監
評論