本文主要詳解PCI總線與PXI總線有什么區(qū)別,首先介紹了PCI 總線結(jié)構(gòu)圖、特點(diǎn)及PCI總線性能,其次闡述了PXI總線的特性,最后介紹了PCI總線與PXI總線的區(qū)別。
2018-05-24 09:15:23 13958
13958 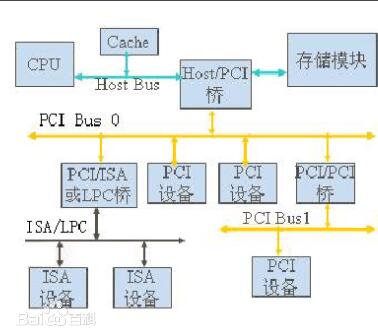
低速CAN總線上為顯性電平(邏輯0)時(shí),CAN_H為3.6V、CAN_L為1.4V,此時(shí)電壓差是2.2V。
2022-10-12 10:18:296268 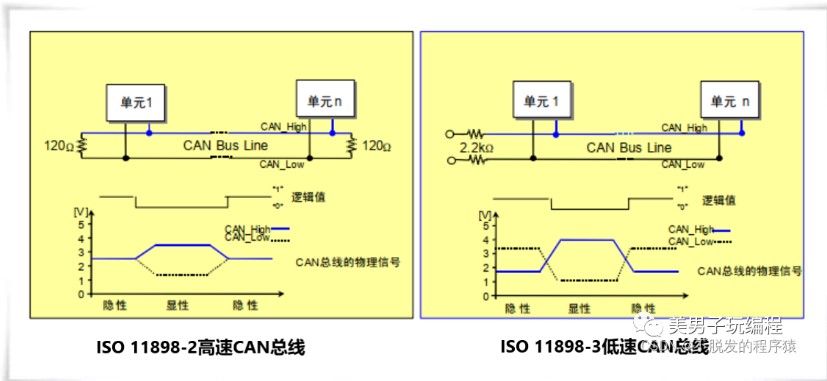
在ISO 11898-2和ISO 11898-3中分別規(guī)定了兩種CAN總線結(jié)構(gòu)(在BOSCH CAN2.0規(guī)范中,并沒有關(guān)于總線拓?fù)浣Y(jié)構(gòu)的說明):高速CAN總線和低速CAN總線,區(qū)別表如下所示。
2023-04-07 09:30:181836 
CAN總線是一種常用的總線,對于剛開始接觸CAN總線的,面對著各式各樣的資料,可能不知道從何看起,今天科普一下CAN總線的基礎(chǔ)知識。CAN2.0協(xié)議分為A版本和B版本,A版本協(xié)議為11位標(biāo)識符(標(biāo)準(zhǔn)幀),B版本在兼容11位ID標(biāo)識符的同時(shí),向上擴(kuò)展到29位ID標(biāo)識符。
2023-05-16 09:49:012304 
CAN 控制器根據(jù)兩根線上的電位差來判斷總線電平。總線電平分為顯性電平和隱性電平,二者必居其一。發(fā)送方通過使總線電平發(fā)生變化,將消息發(fā)送給接收方。
2023-09-22 16:52:00739 
這意味著變送器通過CAN收發(fā)器改變總線電平,并將其信息傳輸?shù)?b class="flag-6" style="color: red">CAN總線。接收器通過監(jiān)測總線電平將總線上的信息讀取到自己的CAN收發(fā)器中。
2024-02-19 14:53:54606 
物理結(jié)構(gòu)上看,CAN節(jié)點(diǎn)的構(gòu)成如圖7-8所示。在CAN中,物理層從結(jié)構(gòu)上可分為三層:分別是物理層信令(Physical Layer Signaling,PLS)、物理介質(zhì)附件(Physical
2014-04-27 15:16:02
常見問題分析。CAN總線和UART、I2C、SPI總線最大的區(qū)別主要在于取消了傳統(tǒng)的地址編碼方式,理論上講總線上的互聯(lián)節(jié)點(diǎn)數(shù)不受限制,擁有強(qiáng)大的握手與出錯(cuò)管理及重發(fā)機(jī)制,具有很強(qiáng)的抗干擾能力。STM32 CAN 基礎(chǔ)內(nèi)容CAN網(wǎng)絡(luò)中主要由CAN控制器和CAN收發(fā)器組成,大部分STM32內(nèi)部都集成了C
2021-08-19 07:41:06
IICSPICAN485USB工業(yè)以太網(wǎng)EtherCATEtherCAT傳輸性能EtherCAT應(yīng)用層協(xié)議層CoE協(xié)議現(xiàn)場總線最近的實(shí)驗(yàn)需要較高的運(yùn)動(dòng)控制速率。市場上大部分的驅(qū)動(dòng)板目前只支持CAN通信。畢竟CAN通信配置簡單
2021-08-06 07:44:19
端口復(fù)用和端口重映射是一回事嗎?CAN總線是什么?CAN總線具有哪些特點(diǎn)?
2021-11-08 06:48:46
前言CAN總線的應(yīng)用在現(xiàn)在看來越來越廣泛,我廠設(shè)備從最初的ARM9與ARM7平臺、期間升級過度到CortexA8與Cortex M3平臺,再到現(xiàn)在的Cortex M4平臺,圍繞CAN進(jìn)行了一系列
2021-07-27 06:18:35
一、大致框架CAN總線的系統(tǒng)架構(gòu),CAN總線上掛在相應(yīng)的設(shè)備節(jié)點(diǎn)。這些設(shè)備節(jié)點(diǎn)包含:最底層也就是物理層的CAN收發(fā)器(和本次使用CAN收發(fā)器有所區(qū)別,僅供參考)。信息協(xié)議層也就是CAN控制器(和本次
2021-08-19 06:47:56
CAN總線簡明易懂教程(講得不錯(cuò))CAN總線簡明易懂教程(一)CAN總線簡明易懂教程(二)CAN總線簡明易懂教程(三)深入淺出、通俗易懂的講解CAN bus。...
2021-08-23 06:07:20
EtherCAT總線運(yùn)動(dòng)控制器硬件是如何進(jìn)行接線的?EtherCAT總線運(yùn)動(dòng)控制器有哪些參數(shù)設(shè)置?
2021-07-15 13:02:24
早期自動(dòng)化行業(yè)的運(yùn)動(dòng)控制大多是:脈沖控制與模擬量控制,后來發(fā)展了CANopen,后來各種以太網(wǎng)總線百花齊放,例如:EtherCAT,PROFINET,POWERLINK, SercosIII
2023-02-20 10:20:57
rs485與can總線的區(qū)別,CAN總線特點(diǎn):1、國際標(biāo)準(zhǔn)的工業(yè)級現(xiàn)場總線,傳輸可靠,實(shí)時(shí)性高;2、傳輸距離遠(yuǎn)(最遠(yuǎn)10Km),傳輸速率快(最高1MHz bps);3、單條總線最多可接110個(gè)節(jié)點(diǎn)
2021-07-19 06:07:04
CAN 總線(Controller Area Network)是控制器局域網(wǎng)的簡稱,是 20 世紀(jì) 80 年代初德國 BOSCH 公司為解決現(xiàn)代汽車中眾多的控制與測試儀器之間的數(shù)據(jù)交換而開發(fā)的一種
2018-12-13 14:26:31
EtherCAT總線擴(kuò)展模塊包含哪些?怎樣去使用正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制器EtherCAT總線?
2021-09-27 08:34:04
CAN總線的實(shí)時(shí)性能非常必要。于是,傳統(tǒng)CAN與時(shí)間觸發(fā)機(jī)制相結(jié)合產(chǎn)生了TTCAN(Time-Triggered CAN)。 TTCAN總線和傳統(tǒng)CAN總線系統(tǒng)的區(qū)別是:總線上不同的信息定義了
2015-06-24 13:56:39
陜西省某國家重點(diǎn)中等職業(yè)學(xué)校,學(xué)校開設(shè)汽車運(yùn)用與維修類、信息技術(shù)類、電工電子類、機(jī)電技術(shù)類等多個(gè)專業(yè),他們咨詢示波器,要做汽車CAN總線解碼測試,詳細(xì)了解了老師的需求后,推薦了普源示波器
2019-09-02 18:08:48
EtherCAT總線軸,不支持脈沖軸和編碼器軸。采用EtherCAT總線與驅(qū)動(dòng)器通訊,1ms的刷新周期。
XPLC006E支持PLC、Basic、HMI組態(tài)三種編程方式。PC上位機(jī)API編程支持C#、C++
2023-05-11 09:49:04
EtherCAT總線伺服電機(jī)/一體化伺服電機(jī)如何恢復(fù)為出廠參數(shù)?
2021-06-28 06:13:21
問下車輛can總線為何要分為高速CAN和容錯(cuò)CAN呢?
2023-05-09 10:38:03
如題,最近準(zhǔn)備開發(fā)一個(gè)項(xiàng)目,需要用到3路CAN總線,一路外部CAN;一路內(nèi)部CAN;一路用來bootload刷程序,請問有沒有哪款STM32芯片適合?謝謝了!!!!
2018-10-12 08:40:41
CAN 總線作為一種現(xiàn)場總線,應(yīng)用極為普及。本文給出了一種基于AT89C51 和SJA1000 的CAN 總線節(jié)點(diǎn)設(shè)計(jì)方法,并對軟硬件進(jìn)行了相應(yīng)的說明。關(guān)鍵詞:CAN 總線,SJA1000,單片機(jī)CAN(C
2009-05-25 13:26:12 59
59 本文研究 CAN 總線在電梯串行通訊中的應(yīng)用。論文對比RS-485 通訊方式,分析CAN 總線應(yīng)用于電梯串行通訊中的優(yōu)點(diǎn),采用SJA1000 設(shè)計(jì)了CAN 總線通訊硬件,優(yōu)化CAN總線的通信參數(shù),提高
2009-06-25 13:28:0327 在VXI總線系統(tǒng)中,為了能夠獲得大量實(shí)時(shí)數(shù)據(jù),需要利用CAN總線快速可靠的傳輸數(shù)據(jù)的性能,設(shè)計(jì)一種混合VXI總線和CAN總線的系統(tǒng)。在這種混合系統(tǒng)中要實(shí)現(xiàn)CAN總線上各個(gè)節(jié)點(diǎn)采集
2009-07-06 16:27:5813 鑒于目前基于RS-485通信的監(jiān)控系統(tǒng)的一些問題,本文闡述了用微控制器P87C591和現(xiàn)場總線技術(shù)實(shí)現(xiàn)基于CAN總線的監(jiān)控系統(tǒng),還詳細(xì)說明了RS-232與CAN總線轉(zhuǎn)換器和基于CAN總線的云臺控制
2009-07-09 10:06:4736 無錫耐特森MCN-ECCAN是自主研發(fā)的一款 ETHERCAT 從站功能的通訊網(wǎng)關(guān)。該產(chǎn)品主要功能是將各種 CAN 總線和 ETHERCAT 網(wǎng)絡(luò)連接起來。ETHERCAT轉(zhuǎn)CAN網(wǎng)關(guān)
2023-12-12 16:34:04
CAN總線通信電路
2008-10-14 13:59:176323 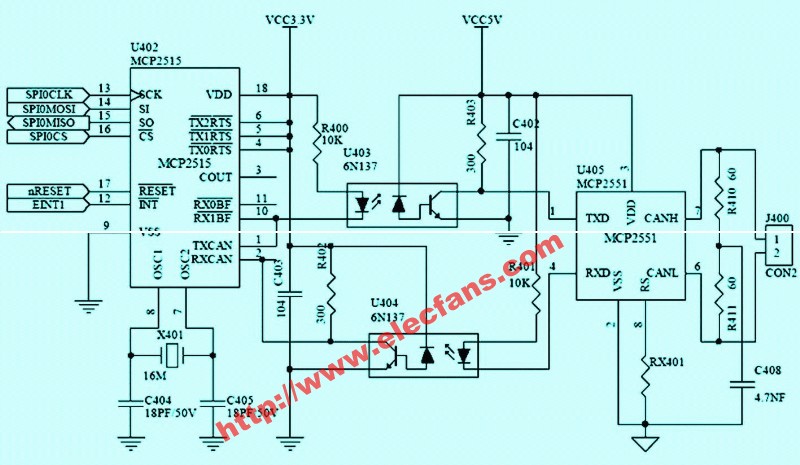
什么是CAN總線
現(xiàn)場總線是當(dāng)今自動(dòng)化領(lǐng)域技術(shù)發(fā)展的熱點(diǎn)之一,被譽(yù)為自
2010-01-12 15:38:263116 
CAN總線與RS-485總線的通信接口設(shè)計(jì)
1 CAN總線及RS-485總線簡介 CAN總線(Controller Area Network)是由德國Bosch公司于20世紀(jì)80年代專門為汽車電子控制系統(tǒng)
2010-01-27 10:46:074197 
本文介紹了CAN 總線的主要性能及特點(diǎn),CAN 總線在實(shí)際工業(yè)應(yīng)用中的總體結(jié)構(gòu),同時(shí)給出了CAN 總線協(xié)議轉(zhuǎn)換器的硬件設(shè)計(jì)方法和通信協(xié)議。主要研究了CAN 總線接口電路設(shè)計(jì),把所設(shè)計(jì)的
2011-10-31 15:01:47463 文中分析了CAN總線的發(fā)展和汽車CAN總線技術(shù)的特征,對CAN總線在汽車領(lǐng)域的應(yīng)用進(jìn)行了深入的探討。
2011-12-14 14:58:1084 串行總線的分析功能分為兩個(gè)部分,總線觸發(fā)和總線分析。DLM2000支持標(biāo)準(zhǔn)的CAN/LIN/I2C/SPI/UART總線觸發(fā)
2012-04-07 15:14:421430 
目前PCI是處于主流的計(jì)算機(jī)總線。以往的CAN卡一般都是基于ISA總線的,由于ISA總線傳輸速率低,CAN卡必須增加中繼控制功能,才能夠適應(yīng)CAN的高速傳輸,導(dǎo)致造價(jià)高、體積大、傳輸速率
2012-06-01 10:57:432053 
控制器局域網(wǎng)總線(CAN,Controller Area Network)是一種用于實(shí)時(shí)應(yīng)用的串行通訊協(xié)議總線,它可以使用雙絞線來傳輸信號,是世界上應(yīng)用最廣泛的現(xiàn)場總線之一。CAN協(xié)議由德國的Robert Bos
2012-09-10 09:22:53197509 
應(yīng)用51單片機(jī)為控制核心結(jié)合其他的器件設(shè)計(jì)了一種能連接于CAN總線上的智能節(jié)點(diǎn)。通過單片機(jī)控制CAN總線控制器SJA1000,并進(jìn)一步通過CAN總線收發(fā)器PCA82C250,實(shí)現(xiàn)該智能節(jié)點(diǎn)與CAN總線的
2013-01-10 16:54:57120 CAN總線通訊已經(jīng)從汽車電子行業(yè)逐漸向各行各業(yè)鋪開使用了,例如軌道交通、礦井監(jiān)控等。在設(shè)計(jì)CAN總線接口電路時(shí)需要注意,
對于提高CAN總線節(jié)點(diǎn)的可靠性而言,離不開隔離、總線阻抗匹配、總線保護(hù)等,在設(shè)計(jì)CAN節(jié)點(diǎn)時(shí)要注意這些點(diǎn)以提高總線電路可靠性和安全性。
2016-06-08 11:41:272862 CAN總線快速入門
2016-12-13 17:15:1922 CAN總線和RS485總線的定義 ? CAN是控制器局域網(wǎng)絡(luò)(Controller Area Network, CAN)的簡稱,是由研發(fā)和生產(chǎn)汽車電子產(chǎn)品著稱的德國BOSCH公司開發(fā)了的,并最終成為
2017-09-24 10:29:5813 一、CAN總線 CAN是控制器局域網(wǎng)絡(luò)(Controller Area Network, CAN)的簡稱,是由以研發(fā)和生產(chǎn)汽車電子產(chǎn)品著稱的德國BOSCH公司開發(fā)的,并最終成為國際標(biāo)準(zhǔn)(ISO
2017-11-27 09:46:34134673 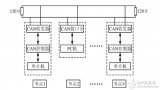
明顯的區(qū)別。 當(dāng)CAN總線上的一個(gè)節(jié)點(diǎn)(站)發(fā)送數(shù)據(jù)時(shí),它以報(bào)文形式廣播給網(wǎng)絡(luò)中所有節(jié)點(diǎn)。對每個(gè)節(jié)點(diǎn)來說,無論數(shù)據(jù)是否是發(fā)給自己的,都對其進(jìn)行接收。每組報(bào)文開頭的11位字符為標(biāo)識符,定義了報(bào)文的優(yōu)先級,這種報(bào)文格式稱為面向內(nèi)容的編址方案。在
2017-12-07 10:25:5426 CAN總線是一種基于優(yōu)先級的串行通信網(wǎng)絡(luò),采用載波監(jiān)聽多路轉(zhuǎn)換沖突避免協(xié)議,CAN總線中傳輸?shù)臄?shù)據(jù)幀的起始部分為數(shù)據(jù)的標(biāo)識符,標(biāo)識符可以區(qū)分消息又可以表示消息的優(yōu)先級(0 的優(yōu)先級最高)。
2018-04-24 17:48:1619008 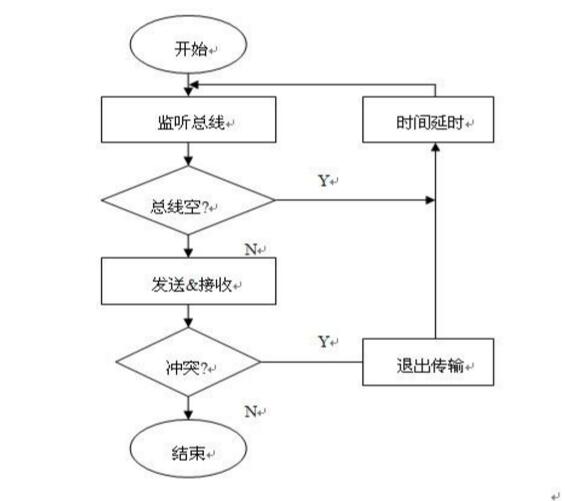
本文首先介紹了can總線的概念與特點(diǎn),其次介紹了CAN總線原理與CAN總線的應(yīng)用,最后分析了can總線是數(shù)字信號還是模擬信號以及闡述了模擬信號和數(shù)字信號之間的區(qū)別。
2018-04-25 09:15:5776256 
CAN已經(jīng)形成國際標(biāo)準(zhǔn),并已被公認(rèn)為幾種最有前途的現(xiàn)場總線之一。CAN 總線的數(shù)據(jù)通信具有突出的可靠性、實(shí)時(shí)性和靈活性。由于其良好的性能及獨(dú)特的設(shè)計(jì),CAN總線越來越受到人們的重視,它在汽車領(lǐng)域上的應(yīng)用是最廣泛的。接下來及跟隨小編一起來了解一下CAN總線的工作原理、特點(diǎn)及優(yōu)缺點(diǎn)、應(yīng)用領(lǐng)域及應(yīng)用案例吧。
2018-05-07 10:36:3933700 
本文說的CAN即是一種總線,也是一種協(xié)議。因此,我們常聽見CAN總線,也常聽見CAN協(xié)議。CAN協(xié)議和CANOpen協(xié)議是兩套不同的協(xié)議。從軟硬件層次來劃分,CAN協(xié)議屬于硬件協(xié)議,而CANOpen
2018-10-03 19:53:0073332 
本文檔額度主要內(nèi)容詳細(xì)介紹的是CAN總線教程之CAN總線快速入門資料免費(fèi)下載主要內(nèi)容包括了:CAN總線概述,數(shù)據(jù)鏈路層,物理層
2018-12-07 17:20:39201 應(yīng)用最廣泛的現(xiàn)場總線之一。 在北美和西歐,CAN總線協(xié)議已經(jīng)成為汽車計(jì)算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線,并且擁有以CAN為底層協(xié)議專為大型貨車和重工機(jī)械車輛設(shè)計(jì)的J1939協(xié)議。
2019-04-08 15:51:0631382 本文首先闡述了系統(tǒng)總線的概念,其次闡述了系統(tǒng)總線技術(shù)指標(biāo),最后介紹了系統(tǒng)總線的三大分類。
2019-11-15 10:38:5456501 CAN總線是與串行總線不同的工業(yè)控制通信系統(tǒng),是德國博世公司為提供汽車電子產(chǎn)品的升級服務(wù),所有它更多的用于汽車控制。為什么它非常適合汽車行業(yè)呢?
2020-11-02 10:52:2133958 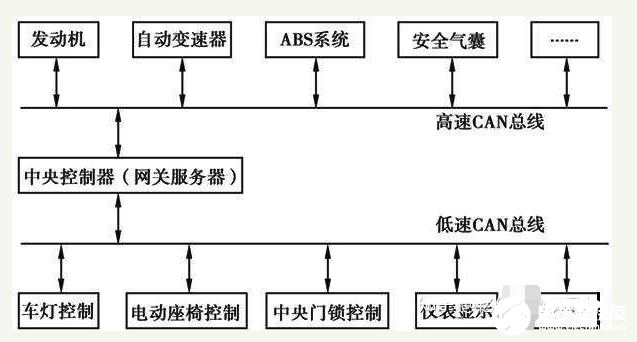
花點(diǎn)時(shí)間看了一些關(guān)于LIN總線基礎(chǔ)的內(nèi)容,把其中的關(guān)鍵點(diǎn)提取了出來,在這里分享給大家。在這里你可能要問不都有CAN總線了嗎?這個(gè)LIN總線又是從哪里來的?其實(shí)理由很簡單,就是CAN總線太貴啦!處處
2020-12-06 09:37:007998 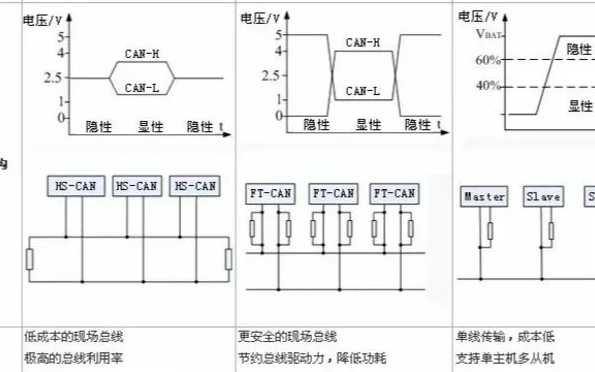
花點(diǎn)時(shí)間看了一些關(guān)于LIN總線基礎(chǔ)的內(nèi)容,把其中的關(guān)鍵點(diǎn)提取了出來,在這里分享給大家。在這里你可能要問“不都有CAN總線了嗎?這個(gè)LIN總線又是從哪里來的?”其實(shí)理由很簡單,就是CAN總線太貴啦!處處都用CAN總線的話,那整車的總線架構(gòu)成本將會變得很高!
2021-03-17 17:51:1825252 
電子發(fā)燒友網(wǎng)為你提供CAN總線是什么,CAN總線的特點(diǎn)資料下載的電子資料下載,更有其他相關(guān)的電路圖、源代碼、課件教程、中文資料、英文資料、參考設(shè)計(jì)、用戶指南、解決方案等資料,希望可以幫助到廣大的電子工程師們。
2021-04-17 08:48:4832 當(dāng)今CAN總線的競爭對手包括以RS485為物理層的總線和FlexRay總線,這種形勢下cAN總線的生命力在于其優(yōu)越的抗干擾能力和性價(jià)比,這些都來源于它獨(dú)特的物理層與數(shù)據(jù)鏈路層的設(shè)計(jì)。
2021-04-19 15:39:267 讀CAN總線的書時(shí),都會涉及到總線電平的問題,CAN總線的電平分為顯性電平與隱性電平,這是CAN總線物理層的核心部分,也是總線仲裁的基礎(chǔ)。那何為顯性,何為隱性呢?
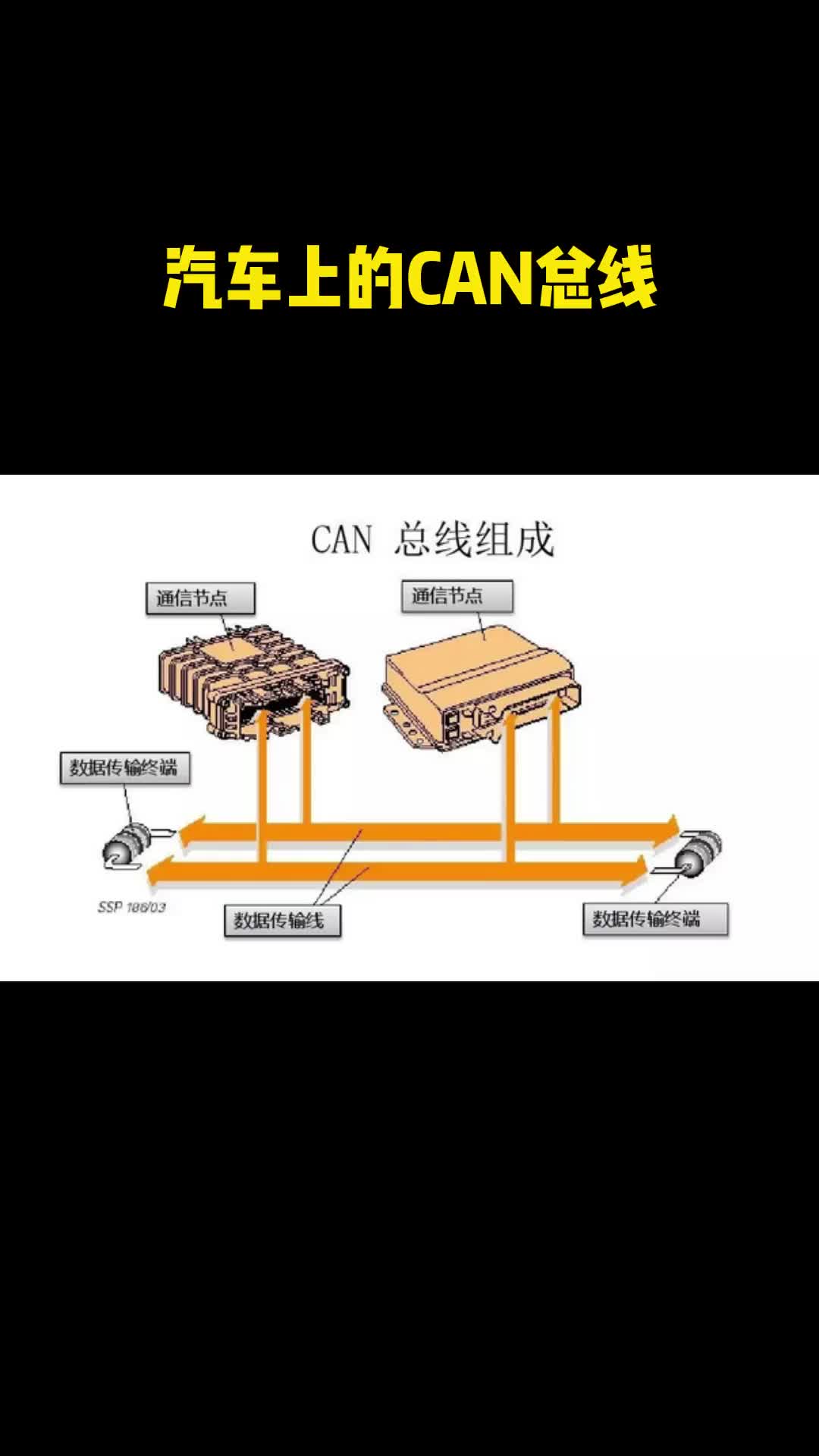
2021-04-19 16:58:1621 所有控制儀表的相關(guān) CAN 總線,例如:舒適系統(tǒng)數(shù)據(jù)總線,都圍繞在中心點(diǎn)。 插頭連接 CAN 總線中心點(diǎn)。
2021-04-20 09:36:5322 在現(xiàn)場總線概念的出現(xiàn)到現(xiàn)在的近20年時(shí)間里,已經(jīng)出現(xiàn)了好幾種現(xiàn)場總線技術(shù)并走向成熟。其中CAN總線已被公認(rèn)為幾種最有前途的現(xiàn)場總線之一。CAN是一種由帶有CAN控制器組成的高性能串行數(shù)據(jù)局域通信網(wǎng)絡(luò),是國際上應(yīng)用最廣泛的現(xiàn)場總線之一。
2021-04-20 15:55:3023 以MSCAN08和MSCAN12為示例,講述CAN現(xiàn)場總線,初步掌握CAN總線技術(shù)的應(yīng)用。
2021-04-20 16:12:35287 RS485和CAN總線都是工業(yè)總線系統(tǒng),即工業(yè)控制通信系統(tǒng) ,CAN 是 Controller Area Network 的縮寫,即“局域網(wǎng)控制器”的意思,可以歸屬于工業(yè)現(xiàn)場總線的范疇,通常稱為
2021-07-12 14:40:2514126 CAN總線是什么意思 CAN的全稱是Controller Area Network,中文名稱是控制器局域網(wǎng)絡(luò),是由德國BOSCH公司開發(fā)的,并且最后成為國際標(biāo)準(zhǔn),這是目前應(yīng)用最多的現(xiàn)場總線之一。現(xiàn)場
2021-08-07 16:37:1317486 的雙絞線上運(yùn)行,還能夠使用光纜連接。CAN在細(xì)節(jié)上很多地方與I2C總線差不多,不過也有一些區(qū)別比較明顯。 CAN總線用報(bào)文形式廣播的方式從一個(gè)節(jié)點(diǎn)向另一個(gè)節(jié)點(diǎn)發(fā)送數(shù)據(jù)。對于節(jié)點(diǎn)來說,不管這個(gè)數(shù)據(jù)是發(fā)到哪里的,自己都要接收。 當(dāng)一個(gè)節(jié)點(diǎn)要發(fā)送數(shù)據(jù)的時(shí)候
2021-08-07 17:07:4333792 計(jì)算機(jī)的總線分為:控制總線、數(shù)據(jù)總線和地址總線。
2021-10-20 11:32:1227358 (OSI參考模型介紹)是肯定的,我們可以看一下相關(guān)的文檔可知:CAN遵從OSI模型。 上面這一點(diǎn)大部分人都是熟知的。 第二、CAN總線分為哪幾層 根據(jù)《FPGA和USB3.0通信-USB3.0協(xié)議介紹》中總線、協(xié)議、接口關(guān)系可知: CAN總線內(nèi)容整體比較簡單(相對),肯定沒有USB、PCIe協(xié)
2021-11-18 16:35:555375 
很多的司機(jī)朋友以及工控圈的朋友都有聽到過“CAN總線”一詞,今天我們就來一起看一下CAN總線為什么這么火? CAN總線,也叫做控制器局域網(wǎng)總線(Controller Area Network
2022-01-15 17:04:485782 《CAN總線入門書》pdf
2022-01-24 17:03:48377 can總線通訊卡,一般是指我們平時(shí)進(jìn)行汽車CAN總線調(diào)試的USBCAN分析儀,它是我們進(jìn)行目標(biāo)CAN設(shè)備CAN總線研究的基礎(chǔ)工具。根據(jù)設(shè)計(jì)的不同,其可分為單通道版本,雙通道版本以及多通道版本
2022-01-27 09:48:273147 在本系列文章中,我們將為您詳細(xì)介紹CAN總線錯(cuò)誤的相關(guān)知識,包括CAN總線錯(cuò)誤的基礎(chǔ)概念、CAN總線錯(cuò)誤的類型、CAN錯(cuò)誤幀和CAN節(jié)點(diǎn)錯(cuò)誤狀態(tài),并通過實(shí)際的應(yīng)用測試生成并記錄CAN錯(cuò)誤。
2022-06-13 16:08:347206 當(dāng)汽車工業(yè)進(jìn)入發(fā)展階段時(shí),CAN 總線已經(jīng)開始以其能夠提供的廣泛功能應(yīng)用于該行業(yè)。它在具有以非常合理的成本同時(shí)擁有相當(dāng)多的優(yōu)秀特性,很快就成為了目前使用的核心通信協(xié)議。但是,隨著時(shí)間的推移,技術(shù)發(fā)展
2022-06-20 17:40:144968 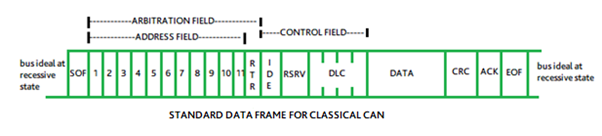
本節(jié)主要介紹XPLC006E多軸經(jīng)濟(jì)型EtherCAT總線運(yùn)動(dòng)控制器控制EtherCAT總線驅(qū)動(dòng)器的方法,分別介紹硬件接線方法,控制器與EtherCAT總線驅(qū)動(dòng)器如何通訊,EtherCAT總線驅(qū)動(dòng)器相關(guān)參數(shù)的配置,EtherCAT總線初始化操作,以及初始化成功以后的運(yùn)動(dòng)控制。
2022-08-11 14:40:245638 
高速CAN總線上為顯性電平(邏輯0)時(shí),CAN_H為3.5V、CAN_L為1.5V,此時(shí)電壓差是2V,顯性狀態(tài)的CAN總線電壓范圍。
高速CAN總線上為隱性電平(邏輯1)時(shí),CAN_H和CAN_L都為2.5V,此時(shí)電壓差就是0V,隱性狀態(tài)的CAN總線電壓范圍。
2022-09-13 16:57:223631 plccan總線通訊的意義就在于提高了PLC工作的穩(wěn)定性和安全性,畢竟CAN總線可以算得上是最穩(wěn)的幾類現(xiàn)場總線之一了。
2022-09-21 14:07:233734 CAN總線是一種常用的總線,對于剛開始接觸CAN總線的,面對著各式各樣的資料,可能不知道從何看起,今天科普一下CAN總線的基礎(chǔ)知識。CAN2.0協(xié)議分為A版本和B版本,A版本協(xié)議為11位標(biāo)識符(標(biāo)準(zhǔn)幀),B版本在兼容11位ID標(biāo)識符的同時(shí),向上擴(kuò)展到29位ID標(biāo)識符。
2023-02-09 15:43:152666 :CAN2.0A和CAN2.0B。CAN2.0A支持11位標(biāo)準(zhǔn)標(biāo)識符,而CAN2.0B支持29位擴(kuò)展標(biāo)識符。CAN總線拓?fù)浣Y(jié)構(gòu)分為總線型、星型和混合型。總線型結(jié)構(gòu)最為普遍,它連
2023-04-21 09:42:31639 
由于好多現(xiàn)場會出現(xiàn)將CAN總線的設(shè)備接到EtherCAT網(wǎng)絡(luò)中,由于協(xié)議的不相同,不能直接進(jìn)行連接,現(xiàn)需一種能同時(shí)兼容CAN 總線和ETHERCAT網(wǎng)絡(luò)的一種設(shè)備,由此遠(yuǎn)創(chuàng)智控YC-ECT-CAN
2023-07-06 09:55:58514 
/S。對于 CAN 總線,一個(gè)位分為 4 段: ①、同步段(SS) ②、傳播時(shí)間段(PTS) ③、相位緩沖段 1(PBS1) ④、相位緩沖段 2(PBS2) 這些段由 Tq(Time Quantum
2023-07-25 10:44:05821 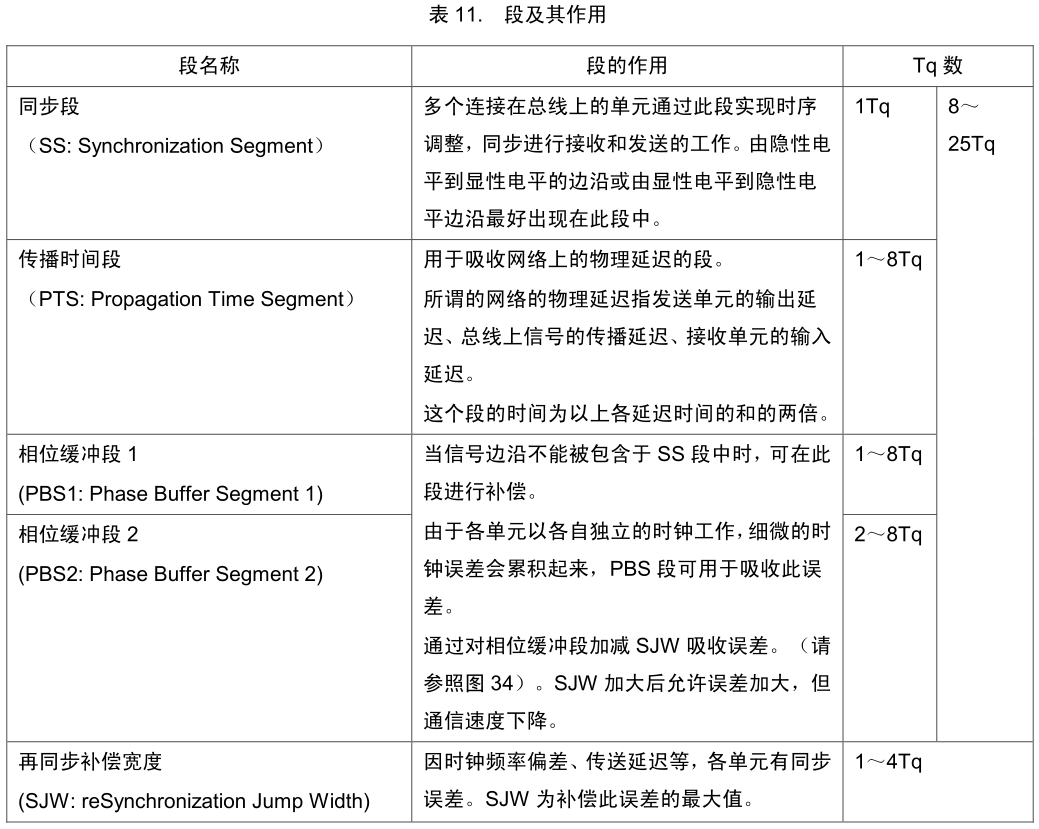
由于好多現(xiàn)場會出現(xiàn)將CAN總線的設(shè)備接到EtherCAT網(wǎng)絡(luò)中,由于協(xié)議的不相同,不能直接進(jìn)行連接,現(xiàn)需一種能同時(shí)兼容CAN 總線和ETHERCAT網(wǎng)絡(luò)的一種設(shè)備,由此捷米JM-ECT-CAN
2023-07-31 09:07:29349 
大家好,今天要跟大家分享一款自主研發(fā)的通訊網(wǎng)關(guān),JM-ECT-CAN。這款產(chǎn)品能夠?qū)⒏鞣NCAN總線和ETHERCAT網(wǎng)絡(luò)連接起來,實(shí)現(xiàn)高效的數(shù)據(jù)傳輸和通信。那么,這款通訊網(wǎng)關(guān)具體有哪些功能和特點(diǎn)呢?接下來,我們就一起來了解一下。
2023-07-31 17:56:05410 
由于好多現(xiàn)場會出現(xiàn)將CAN總線的設(shè)備接到EtherCAT網(wǎng)絡(luò)中,由于協(xié)議的不相同,不能直接進(jìn)行連接,現(xiàn)需一種能同時(shí)兼容CAN 總線和ETHERCAT網(wǎng)絡(luò)的一種設(shè)備,由此捷米JM-ECT-CAN
2023-10-31 18:30:00437 
認(rèn)識CAN 總線錯(cuò)誤的第一步就是了解認(rèn)識CAN 總線協(xié)議和它的具體功能,這樣才能更容易地理解CAN 總線是如何去發(fā)現(xiàn)并解決錯(cuò)誤的。
2023-08-14 15:18:463228 
can總線負(fù)載率多少合理? CAN總線是一種控制器區(qū)域網(wǎng)絡(luò),它是用于在不同設(shè)備之間進(jìn)行通信的技術(shù)。CAN總線的應(yīng)用領(lǐng)域廣泛,例如汽車、航空航天、醫(yī)學(xué)儀器等。在CAN總線中,數(shù)據(jù)通過網(wǎng)絡(luò)傳輸,并且在
2023-09-07 15:05:412173 性和可靠性高的通信方式,因此在控制技術(shù)、自動(dòng)化技術(shù)、車輛網(wǎng)絡(luò)和工廠自動(dòng)化等領(lǐng)域中被廣泛使用。 CAN總線的傳輸速率通常表示為位/秒或波特率,是指每秒鐘傳輸?shù)奈粩?shù),它對于CAN總線的傳輸速度非常關(guān)鍵。CAN總線的傳輸速率通常從低到高可分為以下幾種類型: 1. CAN 2.0A 125kbps(
2023-09-07 15:05:439442 LIN(Local Interconnect Network)總線是基于UART/SCI(通用異步收發(fā)器/串行接口)的低成本串行通訊協(xié)議。其目標(biāo)定位于車身網(wǎng)絡(luò)模塊節(jié)點(diǎn)間的低端通信,主要用于智能傳感器和執(zhí)行器的串行通信,而這正是CAN總線的帶寬和功能所不要求的部分。
2023-09-13 16:35:414329 
can總線為什么要用雙絞線?can總線不用雙絞線可以嗎? CAN總線是一種數(shù)據(jù)通信協(xié)議,廣泛用于汽車、航空、船舶、工業(yè)自動(dòng)化、機(jī)器人等領(lǐng)域。CAN總線采用串行通信方式,主要用于實(shí)現(xiàn)多個(gè)模塊之間的通信
2023-09-14 16:48:053603 CAN控制器根據(jù)兩根線上的電位差來判斷總線電平。總線電平分為顯性電平和隱性電平,二者必居其一。發(fā)送方通過使總線電平發(fā)生變化,將消息發(fā)送給接收方。 顯性電平對應(yīng)邏輯 0,CAN_H 和 CAN
2023-10-27 14:55:281008 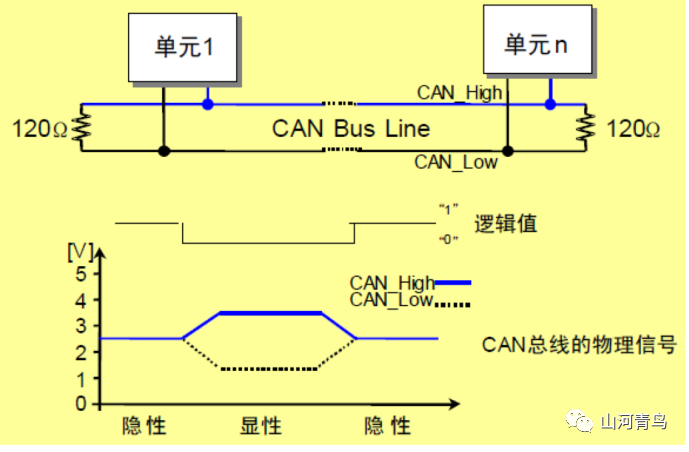
CAN總線
2022-12-30 09:19:574 CAN總線技術(shù)
2022-12-30 09:19:573 CAN總線通訊協(xié)議由德國博世于上世紀(jì)80年代發(fā)明,第一個(gè)使用CAN總線通訊協(xié)議的量產(chǎn)車型是1991年的奔馳S級轎車,至今CAN總線依舊是車內(nèi)主要的通訊總線。隨著汽車電子智能化加速,CAN總線也開始
2023-12-21 14:03:45663 
CAN總線共模電感是應(yīng)用于CAN總線通信中的一種電子元件,用于解決CAN總線通信中的共模干擾問題。本文將詳細(xì)介紹CAN總線共模電感的定義、作用、選型要點(diǎn)以及常見注意事項(xiàng),并且結(jié)合實(shí)際案例進(jìn)行分析
2024-01-05 13:42:34748 高速CAN總線和低速CAN總線的特性 高速CAN總線和低速CAN總線是兩種常見的CAN總線類型。它們在數(shù)據(jù)傳輸速率、最大電纜長度、適用場景等方面存在一些差異。下面將詳盡、詳實(shí)、細(xì)致地介紹這兩種CAN
2024-01-31 14:09:01497 can總線與485總線五大區(qū)別? CAN總線和485總線是現(xiàn)代工業(yè)自動(dòng)化領(lǐng)域中常見的兩種通信總線,它們都具有一定的優(yōu)勢和特點(diǎn)。 一、傳輸距離 CAN總線和485總線在傳輸距離上有著明顯的差異。CAN
2024-02-03 09:22:391583
 電子發(fā)燒友App
電子發(fā)燒友App














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論