") 機(jī)械手的分寸感,靠這款傳感器來(lái)拿捏
機(jī)械手的分寸感,靠這款傳感器來(lái)拿捏

機(jī)械臂是一種能夠模擬人類手臂運(yùn)動(dòng)的機(jī)械裝置,在工業(yè)領(lǐng)域應(yīng)用非常廣泛,其包含的主要技術(shù)是驅(qū)動(dòng)和控制;其末端定位精度是評(píng)價(jià)其性能的重要指標(biāo)之一,而測(cè)量標(biāo)定的方法則是提高機(jī)械臂末端定位精度的關(guān)鍵。
傳感器技術(shù)是機(jī)械臂末端定位精度的重要保障。工程師們常常使用高精度傳感器來(lái)實(shí)時(shí)監(jiān)測(cè)機(jī)械臂末端的位置和姿態(tài),從而提高機(jī)械臂的末端定位精度。
本期小明就來(lái)根大家分享激光位移傳感器在機(jī)械手定位中的應(yīng)用~
檢測(cè)場(chǎng)景
在鋰電自動(dòng)化產(chǎn)線上,機(jī)械手吸盤(pán)精準(zhǔn)吸取電池移動(dòng)至下一工序;這里機(jī)械手上需要安裝傳感器以獲取機(jī)械手Z軸高度數(shù)據(jù),檢測(cè)機(jī)械手距離電池表面的高度。
具體需求:機(jī)械手定位
精度要求:機(jī)械手吸盤(pán)到電池組表面確保能正常吸起電池
現(xiàn)場(chǎng)情況:
1、機(jī)械手吸盤(pán)與電池組之間不能有太大縫隙,也不能過(guò)于貼合
2、傳感器安裝在機(jī)械手臂上跟隨機(jī)械手來(lái)回運(yùn)動(dòng)
3、傳感器距離電池組表面高度在390mm左右
解決方案
選用激光位移傳感器MLD21-500N-485,可以精準(zhǔn)獲取機(jī)械臂的Z軸高度數(shù)據(jù),有效提高機(jī)械臂的自動(dòng)化運(yùn)動(dòng)控制水平,實(shí)現(xiàn)更高效、更精準(zhǔn)的生產(chǎn)作業(yè)。

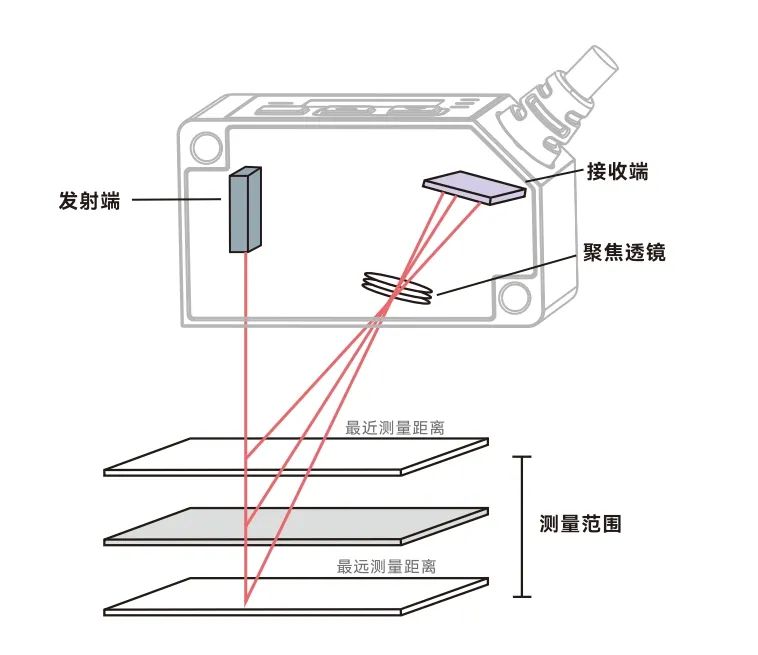
·采用激光三角檢測(cè)法,激光發(fā)射器通過(guò)鏡頭將可見(jiàn)紅色激光射向被測(cè)物體表面,經(jīng)物體表面散射的激光通過(guò)接收器鏡頭,被內(nèi)部的CMOS感光元件接收,根據(jù)不同的距離,CMOS可以在不同的角度下“看見(jiàn)”這個(gè)光點(diǎn)。根據(jù)這個(gè)角度及已知的激光和相機(jī)之間的距離,數(shù)字信號(hào)處理器就能計(jì)算出傳感器和被測(cè)物體之間的距離。
一鍵示教功能,使用簡(jiǎn)單快捷
面板調(diào)節(jié)數(shù)顯,讓調(diào)試更直觀便捷
自動(dòng)曝光調(diào)節(jié),可根據(jù)應(yīng)用場(chǎng)景自動(dòng)調(diào)節(jié)接收能量的大小
檢測(cè)距離100/200/500mm可選,是長(zhǎng)距離檢測(cè)的首選
485通信功能,可通過(guò)通訊去讀取數(shù)值進(jìn)行對(duì)比操作
同時(shí)擁有NPN和PNP兩種輸出方式,滿足不同信號(hào)方式需求
-
傳感器
+關(guān)注
關(guān)注
2565文章
52862瀏覽量
766277 -
測(cè)量
+關(guān)注
關(guān)注
10文章
5227瀏覽量
113294 -
機(jī)械手
+關(guān)注
關(guān)注
7文章
345瀏覽量
30339
發(fā)布評(píng)論請(qǐng)先 登錄
DELTA機(jī)械手多物料視覺(jué)分揀的應(yīng)用

運(yùn)動(dòng)控制模塊:Delta機(jī)械手柔性上下料開(kāi)發(fā)零門(mén)檻!

profinet轉(zhuǎn)ethercat網(wǎng)關(guān)的自動(dòng)上料機(jī)械手集成案例

案例分析,搬運(yùn)機(jī)械手如何選擇電機(jī)?

LabVIEW運(yùn)動(dòng)控制(一):EtherCAT運(yùn)動(dòng)控制器的SCARA機(jī)械手應(yīng)用

明治案例 |【長(zhǎng)距離測(cè)距】【微米級(jí)精度】選這款激光位移

機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在DELTA并聯(lián)機(jī)械手視覺(jué)上下料應(yīng)用


陜西全自動(dòng)拆袋機(jī)械手優(yōu)勢(shì) 碳酸鈉機(jī)械手自動(dòng)破包機(jī)
AI視角下的ZR機(jī)械手市場(chǎng):速程精密科技獨(dú)占鰲頭
機(jī)械手 OEM 的應(yīng)用
明治案例 | 【BGS背景抑制】【大光斑】機(jī)械手吸取網(wǎng)布有無(wú)檢測(cè)

EtherCAT運(yùn)動(dòng)控制器在SCARA和碼垛機(jī)械手中的應(yīng)用
“快、準(zhǔn)、穩(wěn)”——阿普奇AK5在機(jī)械手領(lǐng)域的應(yīng)用解決方案

VPLC7機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在三軸SCARA機(jī)械手螺絲鎖付的應(yīng)用

飛創(chuàng)直線模組桁架機(jī)械手優(yōu)勢(shì)及應(yīng)用領(lǐng)域





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論